更长,更强大,更精确的欧洲将建造一种名为
爱因斯坦望远镜的新一代重力波探测器。
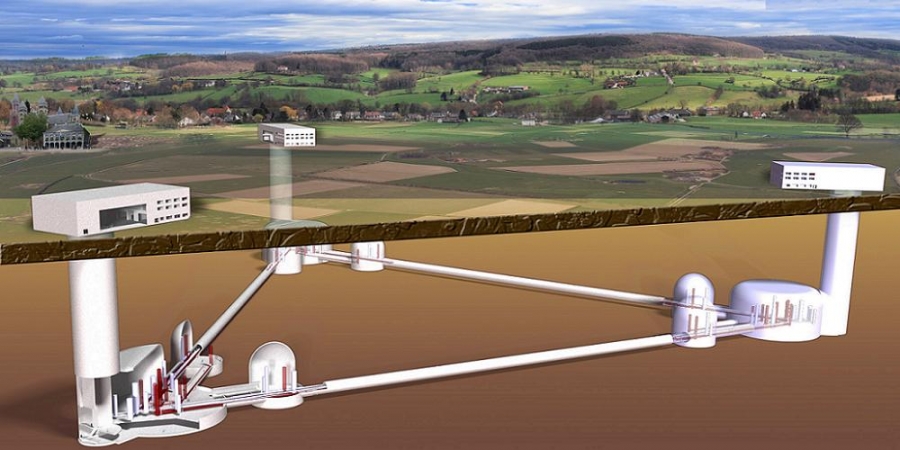 爱因斯坦望远镜的概念艺术,来源: www.gwoptics.org
爱因斯坦望远镜的概念艺术,来源: www.gwoptics.orgAdvancedLIGO探测器在几年前才开始工作,甚至还没有达到计划的灵敏度。 然而,对于科学家而言,显而易见的是,LIGO的灵敏度不足以实现真正的引力波天文学。
我将讨论限制LIGO的因素,以及比LIGO长2.5倍的地下低温探测器如何能够克服这些限制。
1. GV检测器的工作原理简介
首先,我简要回顾一下LIGO如何检测重力波,并定义了一些概念。
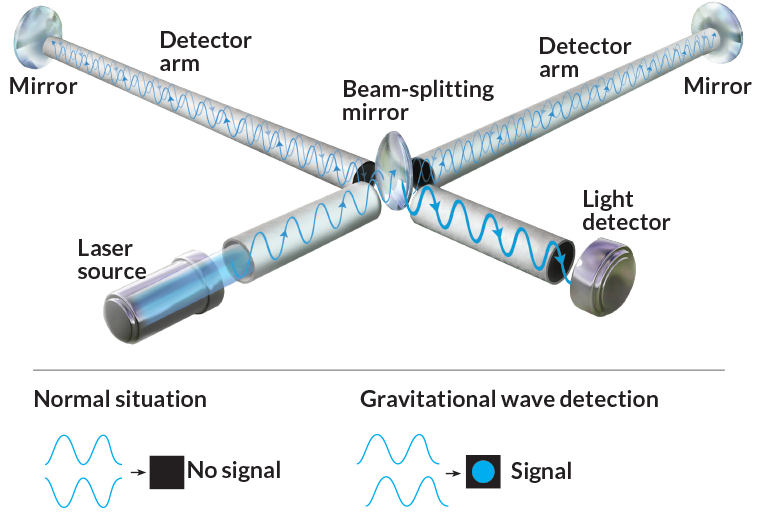 LIGO检测器-迈克尔逊干涉仪。 引力波将一个肩膀拉伸而将另一肩膀挤压,分束器上光的相对相位改变,并且在输出端出现干涉图。 图片来源:induced.info
LIGO检测器-迈克尔逊干涉仪。 引力波将一个肩膀拉伸而将另一肩膀挤压,分束器上光的相对相位改变,并且在输出端出现干涉图。 图片来源:induced.info1.1工作原理
引力波 (GW)是时空度量的微小扰动。 它们在大块物体的不对称运动过程中出现,例如,当两个黑洞合并时。 这些干扰导致对象之间距离的定义发生变化(“拉伸”和“压缩”距离)。 重力波检测器的设计使其可以使用激光测量距离的这种变化。 在最简单的版本中,检测器是迈克尔逊干涉仪,其中检测器的臂处于平衡状态,因此,由于相长干涉,所有的光都朝着源反射,并且由于相消干涉而产生的分束器的第二个输出保持黑暗。
当插头到达检测器时,它们会张开一个肩膀并挤压另一只肩膀,这会改变干涉仪输出处的干涉图样并允许记录信号。
在上一篇文章中,我解释了GV检测器不是标尺,而是时钟,即 测量引力波引起的两臂的相对光延迟。 我还证明了光的相对变化:
phi=L/ lambda
该方程式说明了为何将检测器制作得这么长的原因:这可以提高灵敏度。
为了进一步提高灵敏度,科学家想出了使用光学谐振器的方法。 它们允许光线在肩膀上传播多次
\数学N 有效增加肩长
\数学N 次。
而且,在检测器出口处的信号与检测器内部的光功率成比例,因此,由于谐振器放大了光功率,因此它们立即解决了两个问题。
1.2重力波的极化
引力波是极化的:它们可以是“ +”(相对于检测器-伸展一个肩膀并挤压另一个肩膀),也可以是“ x”(同时伸展/挤压两个肩膀)。
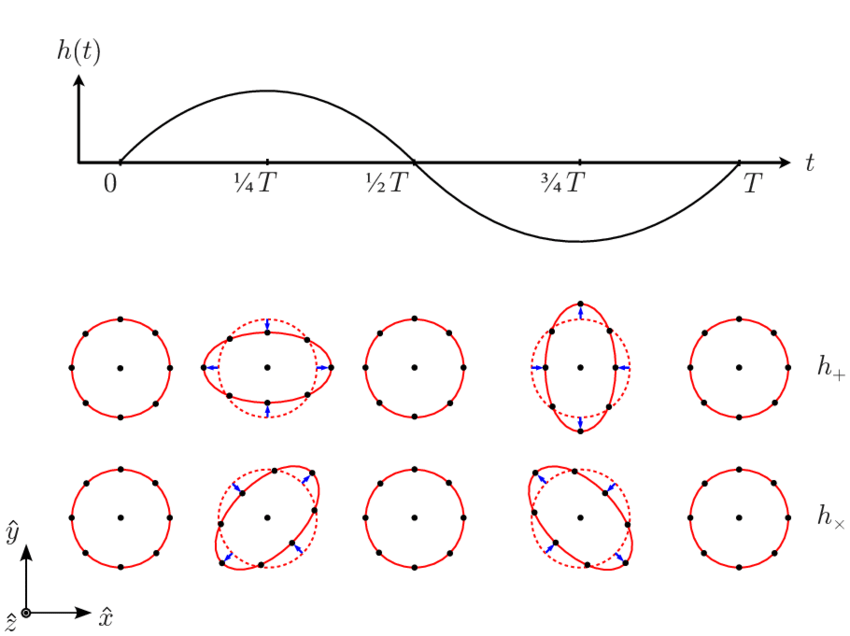 在一个时期内,在不同极化的HS作用下,测试质量(球)的位移。 图片来源:[Tiec,Novak,2017年]
在一个时期内,在不同极化的HS作用下,测试质量(球)的位移。 图片来源:[Tiec,Novak,2017年]检测器仅对“ +”极化敏感。 因此,重要的是要有几个肩部方位略有不同的探测器,这样就可以测量任何极化的波:如果一个探测器的方位为“ +”,第二个探测器的方位为“ x”,那么如果一个探测器看到了该波而另一个探测器没有看到,我们确定这种极化正好是“ +”。 而且,如果两者都看到了一个不同幅度的波,那么我们可以计算出初始极化是什么。
对极化的灵敏度为两种极化设置了不同的辐射方向图(即,天空中的点最容易被探测器看到)。
 检测器对x和+极化的图案,以及两个极化的平均值。 学分:arXiv:1501.03765
检测器对x和+极化的图案,以及两个极化的平均值。 学分:arXiv:1501.037652. LIGO的局限性
LIGO具有令人难以置信的灵敏度:它使您能够以10
-18 m的精度测量肩长的相对变化。
为了以这种精度测量信号,必须消除仪器各个部分的各种噪声。
检测器的灵敏度通常以频谱密度的形式表示为不同频率下检测器中的噪声水平。 频谱密度反映了不同噪声对检测器输出处信号的影响(即某些噪声在原点可能很重要,但对输出处的噪声影响很小)。 通常,频谱密度被归一化为重力波的振幅(称为应变,
h= DeltaL/L )
 对LIGO在不同频率下的灵敏度的主要贡献,已标准化为GW应变的幅度, h= DeltaL/L
对LIGO在不同频率下的灵敏度的主要贡献,已标准化为GW应变的幅度, h= DeltaL/L考虑一些对噪声最重要的贡献:
1.
地震噪声 (极限频率<1Hz):任何地震活动都可以移动反射镜。 为了与这种噪音隔离,将镜子悬挂在多级悬挂上,然后将其安装在多层大架子上。 悬架的谐振频率越低,低频处的噪声就越多。 原则上,降噪质量没有限制。
2.
牛顿引力噪声 (极限频率〜1Hz):即使后视镜与直接地震作用完全隔离,地表/地面的位移也会在重力上影响后视镜。 例如,由于风或波浪在地球表面传播的声波会稍微改变从反光镜到地面的距离,因此会改变可移动反光镜的吸引力。 不可能完全将其隔离,这是一个基本限制。
3.
悬浮液的热噪声 (极限频率〜1-10Hz):反射镜悬浮液中分子的热运动导致激发悬浮液中的振动,从而使反射镜移位。 很难抑制;一切都取决于材料的质量。
4.
镜子的热噪声 (从下面限制灵敏度):镜子涂层和镜子(基板)“主体”中分子的热运动。 对于一束光线,看起来就像镜子本身的整个位移。 限于材料,最重要的技术噪音。
5.
量子散发的激光噪声 (频率> 50Hz):光具有量子性质,单个光子以不同的随机值随机延迟地飞行。 此延迟在干涉仪的输出端作为相位测量可见,并限制了所有频率。 检测器内部的光功率越大,噪声越小。 基本极限,但可以使用挤压光抑制。
6.
辐射压力的量子噪声 (频率10–50 Hz):相同的散粒噪声会导致干涉仪内部的功率波动,并在反射镜上产生随机的辐射压力。 和散粒噪声一样基本。 与散粒噪声不同,它随光功率的增加而增加。
 关于量子噪声的解释。 单光子产生随机的辐射压力(左)。 另一方面,光子随时间的随机分布会导致光电探测器的振幅波动(右)。 两种噪声都取决于波长,光功率和肩长。 辐射压力的噪声越小,镜子的质量越大。 信用:[1]。
关于量子噪声的解释。 单光子产生随机的辐射压力(左)。 另一方面,光子随时间的随机分布会导致光电探测器的振幅波动(右)。 两种噪声都取决于波长,光功率和肩长。 辐射压力的噪声越小,镜子的质量越大。 信用:[1]。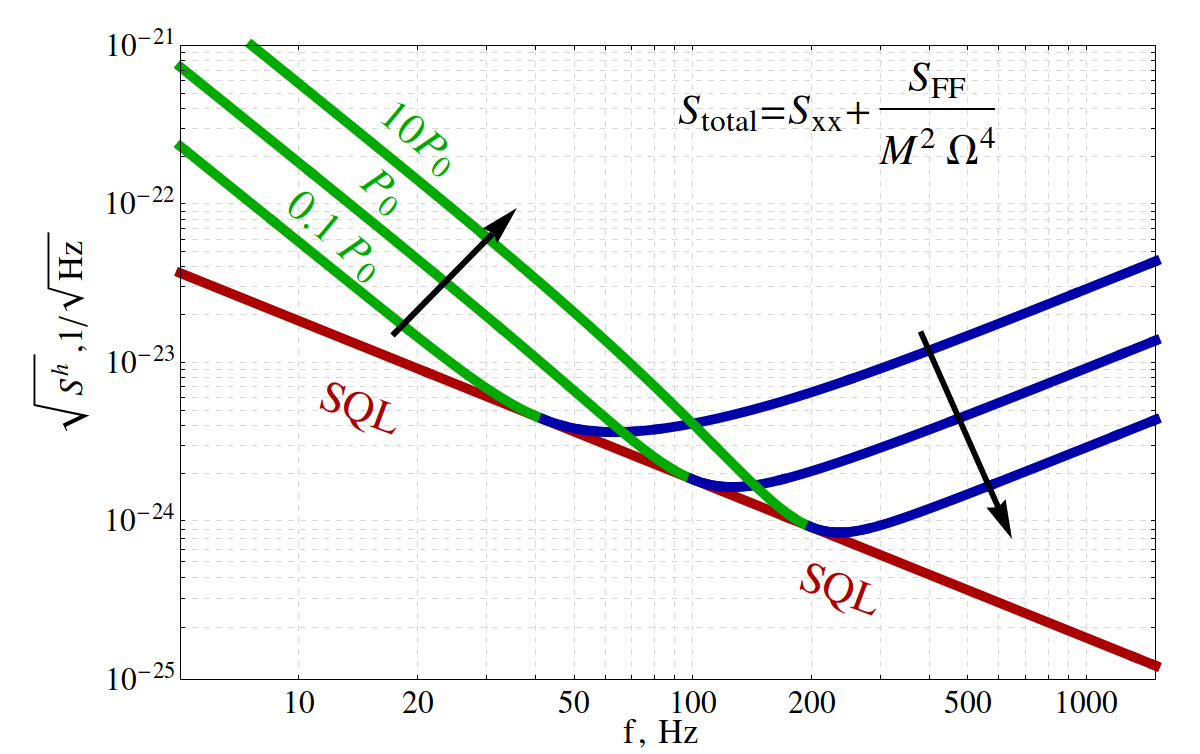 对光功率的敏感性 P0 :降低散粒噪声(蓝色),并且放射压力噪声(绿色)成比例增加。
对光功率的敏感性 P0 :降低散粒噪声(蓝色),并且放射压力噪声(绿色)成比例增加。7.真空系统中的
残余气体 (所有频率,但现在不限制):系统中的超高真空始终不理想,残余气体分子会散射光。 它可以任意小(取决于泵的质量)。
8.
经典激光噪声 (无限制):激光功率和频率会因经典原因(热噪声,振动)而波动。 激光器系统包括超稳定激光器和用于监视激光器频率和功率的多层系统。
所有这些噪声可以分为两类:功率-波动导致反射镜的物理位移(噪声1-3和6),坐标-波动导致光的相位变化,但不移动反射镜(噪声4,5和7)。
电源噪音
F 引起偏见
x 根据牛顿定律测试质量
m ddotx=F ,或在频率范围内:
x( Omega)=F( Omega)/(m Omega2) 。 即,可以通过增加镜子的质量来减少这些噪声。
LIGO设计从根本上无法解决牛顿噪声2的问题,并且如果不对光学系统进行全面检修,就无法解决镜子4的热噪声问题。
有关噪声的更多详细信息,您可以
在Habré上阅读
有关LIGO的
精彩文章 。
3.新的探测器将如何解决这些问题
 KAGRA地下探测器将于明年加入观测。
KAGRA地下探测器将于明年加入观测。因此,新的探测器将位于地下。 这将减少地震噪声1,最重要的是减少牛顿噪声2:对地震的主要贡献是由几乎不在地下的表面波引起的。
根据检测器的制造位置(现在有两个主要选项-在荷兰或撒丁岛,可能在匈牙利)。
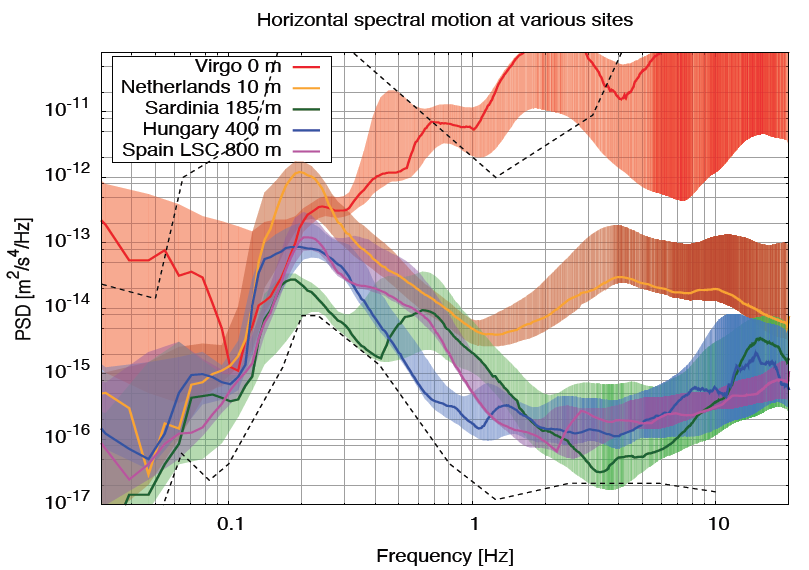 使用意大利的AdvancedVirgo探测器比较不同位置的地震数据。
使用意大利的AdvancedVirgo探测器比较不同位置的地震数据。当然,将采取抑制地震的最明显的技术步骤:一种用于被动隔离的新型悬挂系统和200千克的较重镜面,用以抑制所有电源噪声。
 爱因斯坦望远镜的拐角站之一,有许多真空室。 图片来源:gwoptics.org
爱因斯坦望远镜的拐角站之一,有许多真空室。 图片来源:gwoptics.org镜子的热噪声问题更加复杂。 显而易见的解决方案是冷却反射镜,从而降低布朗噪声。
然而,冷却将改变反射镜的光学特性,并增加吸收。 另外,不可能将大功率的光与冷镜一起使用:镜中的吸收会加热它们,并减少冷却量。 也就是说,您需要冷却检测器并降低光功率吗? 这也将不起作用-散粒噪声会增加(4),并且低频处的灵敏度会受到损害。
科学家们提出了另一种解决方案:在一个地方使用两个干涉仪。
 “木琴”检测器配置,两个干涉仪相互嵌入。 图片来源:A。Freise等人,CQG 26(2009)085012
“木琴”检测器配置,两个干涉仪相互嵌入。 图片来源:A。Freise等人,CQG 26(2009)085012一种将针对低频进行优化,可将镜子冷却至20K,并使用低功率的光。 散粒噪声会增加,但是在散粒噪声很重要的频率上不能使用检测器。 第二个检测器将在室温下以高功率工作:这将抑制高频下的散粒噪声,但会随着辐射压力噪声的增加而破坏低频下的灵敏度。 但是此检测器不会在低频下使用。 结果,组合灵敏度将在所有频率上都是最佳的。
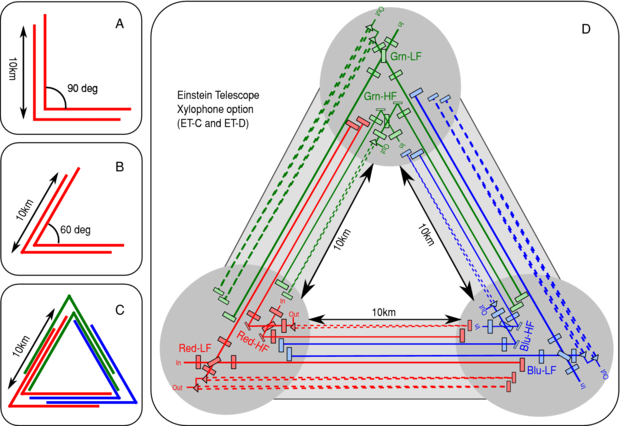
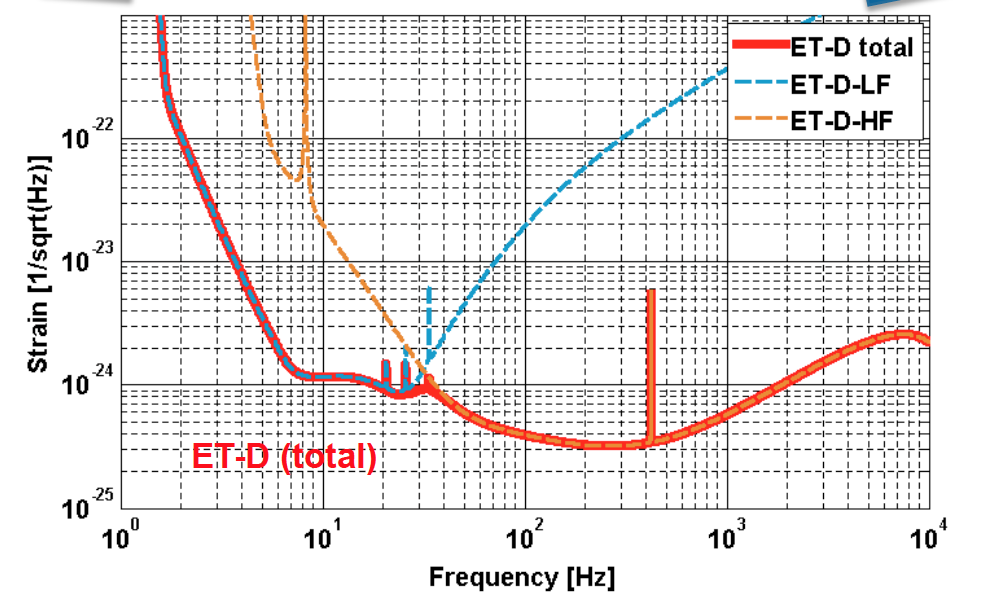 ET-D-LF低频检测器,其镜面冷却且功率低(辐射压噪声低),而ET-D-HF高频检测器,其功率高(噪声低)。 信用:[1]
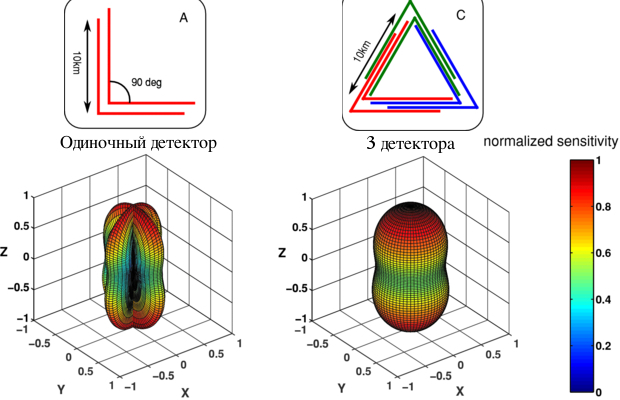
ET-D-LF低频检测器,其镜面冷却且功率低(辐射压噪声低),而ET-D-HF高频检测器,其功率高(噪声低)。 信用:[1]新一代检测器的另一个问题:在建造时,只有这种灵敏度的检测器才是。 首先,如果不可能检查检测器之间的一致性,则不可能从信号中区分出随机脉冲串。 其次,不可能测量引力波的不同极化。 科学家建议不要建造一个探测器,而是建造三个具有不同方向的探测器(如图所示,以三角形的形式)。
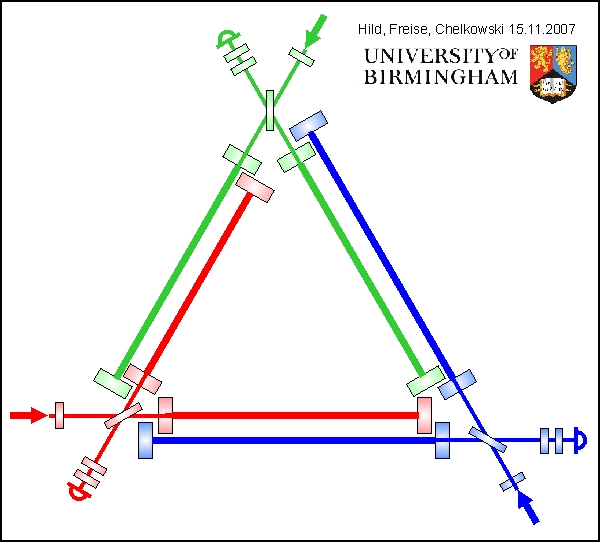
 探测器的三角形配置的概念(左); 不同肩膀的隧道(右)。
探测器的三角形配置的概念(左); 不同肩膀的隧道(右)。这将改善探测器的辐射方向图并记录更多事件:
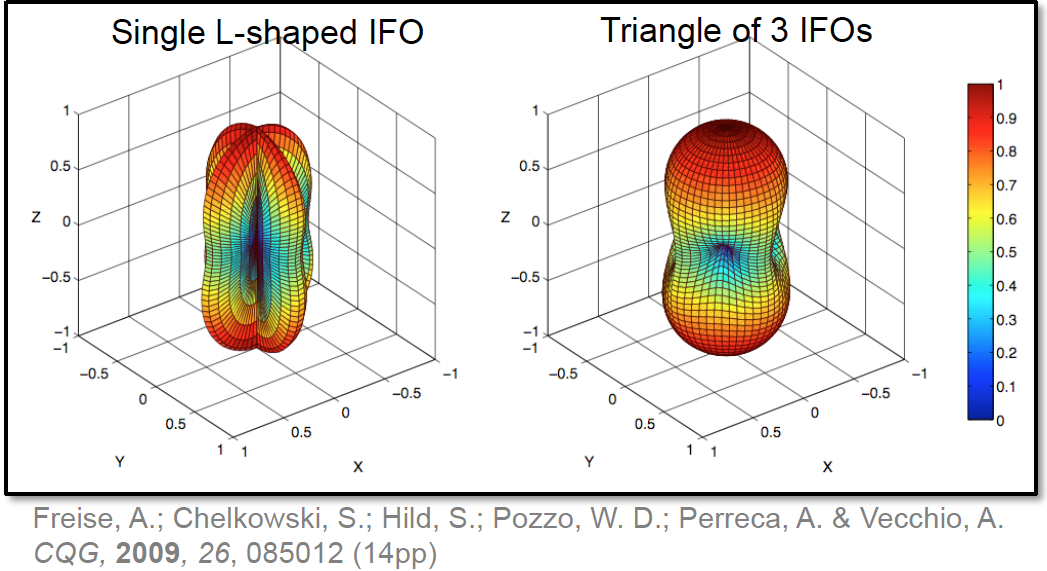 比较一个探测器(左)和三个探测器(呈三角形)的辐射图(右)。
比较一个探测器(左)和三个探测器(呈三角形)的辐射图(右)。让我提醒您,它们每个都将由两个组成:一个用于低频,另一个用于高频。 结果,六个检测器将位于一个三角形中。
所有这些技巧将使检测器的灵敏度至少提高一个数量级。
这样的灵敏度将使观测范围几乎扩大到可见宇宙的边界,看到第一代恒星BH的合并,并不断观察黑洞和中子星的合并。
低频灵敏度的提高将使得有可能观察到物体融合的早期阶段,并获得有关其参数的更多信息。
高频将有可能观察到由于融合而形成的黑洞或中子星的演化。 此模式对于检查广义相对论和可能的替代方案最为有趣。 例如,可以在高频下精确地观察到
重力波回波 。
 ET和LIGO-处女座的敏感性比较
ET和LIGO-处女座的敏感性比较但是最重要的是,它将不仅仅是一个探测器,而且是一个可以在数十年内提高探测器灵敏度的整体基础设施。
4.结论
我没有提到的
我还没有讨论过ET这样重要的部分,例如使用依赖于频率的压缩光的量子噪声抑制系统。 您可以
在Habré上的
精彩文章中阅读有关压缩光的更多信息。 我计划在以后的文章中进一步讨论检测器中的量子噪声。
另外,由于机械振荡器和谐振器内部的光之间存在非线性相互作用,ET将使用所谓的光学刚度-信号放大。 有关量子光力学的更多信息-机械系统与光之间的相互作用的科学-即将在哈布雷(Habré)上展出;)
当然,我仅涉及ET的最基本功能,其中有很多细节-欢迎发表评论。
另外,我没有提到在美国计划建造更长的40 km
Cosmic Explorer地面望远镜,但是它的设计还不如ET发达,因此我不会告诉您任何有趣的细节。
爱因斯坦望远镜状态

ET尚未获得欧盟委员会的批准。 各个国家投资于初步研究。 合作正在逐步形成。 您可以阅读
官方网站 ,甚至可以通过签署
意向书加入合作。
根据计划,在未来一两年内,欧洲将考虑创建申请并批准地点。 在这种情况下,ET的发射将在2030年代初进行。
 一种选择是在德国,比利时和荷兰的边界上放置一个三角形,以便在每个国家/地区都设有一个转角站。 这将是一个统一的欧洲的象征。
一种选择是在德国,比利时和荷兰的边界上放置一个三角形,以便在每个国家/地区都设有一个转角站。 这将是一个统一的欧洲的象征。LIGO新闻
同时,LIGO
宣布了处理来自先前O2观测周期的数据
的结果 :又有四个新的黑洞合并。 因此,LIGO在整个时间里已经看到10个黑洞合并和1个中子星合并。 明天所有数据将正式呈现,我将在本文中补充一些细节。
UPD:因此,
在arXiv上发布了新的引力波目录,以及所有事件
数据的
更新分析 。 没有引起轰动的发现,但是我们已经看到10个黑洞的合并,这本身就是很棒的。
 我们都知道黑洞(太阳质量)和中子星,包括对LIGO-Virgo的观测。 您可以在线观看。 信用:LIGO-处女座/弗兰克·埃拉夫斯基/西北
我们都知道黑洞(太阳质量)和中子星,包括对LIGO-Virgo的观测。 您可以在线观看。 信用:LIGO-处女座/弗兰克·埃拉夫斯基/西北同时,这些探测器正全力以赴以提高其灵敏度,探测器计划于2019年春季在新的年度O3观测周期内发射。 灵敏度如此之大,以至于计划平均每周观察一次事件。 根据计划,2019年夏季,日本KARGA探测器将加入两个LIGO探测器和一个Virgo探测器。
O3周期对于开放科学将是有趣的,因为现在
将实时
宣布所有潜在的合并候选人以及对其来源的评估,这将允许所有感兴趣的人在其他范围内进行观察。 更多细节
在这里 。
引力波天文学的时代才刚刚开始,未来还有很多有趣的事情。 敬请期待!
我还邀请您阅读以前的出版物,其中解释了为什么观察
GB中的中子星如此重要,
有趣的物理学使我们能够研究黑洞合并以及
LIGB在 GB随空间伸展
时通常如何工作 。