大概每个驾驶员都不时尝试评估他的驾驶技能。 当您告诉孩子们如何驾驶汽车时,您会想到如何以及为什么知道前面的汽车何时会向左或向右转。 为什么注意力会自动集中在沿着道路行走的狗上,却没有对悬在道路上的树枝做出反应。 有许多这样的问题,但并非所有问题都能得到解答。
为了学习如何驾驶,您需要了解许多原理并了解规则-对于人类和人工智能都是如此。 后者应注意评估数千个因素-何时何地减速,何处关闭,何处加速。
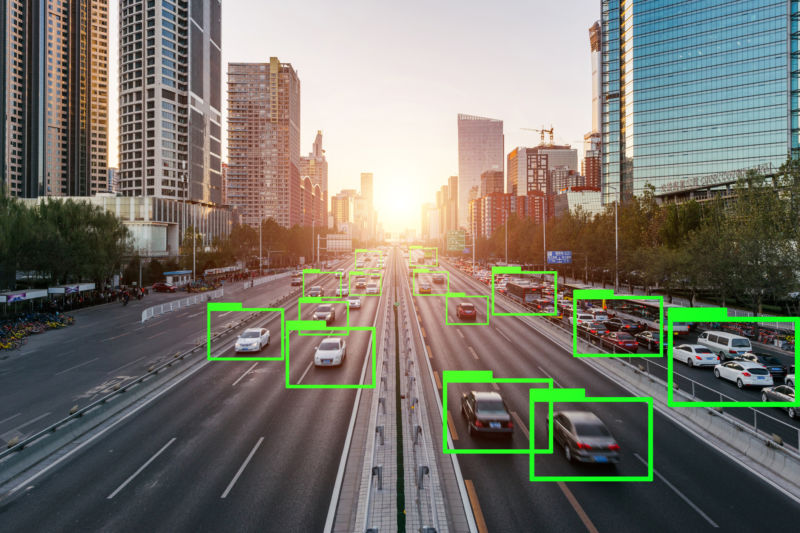
具有最高自治性的汽车不仅应该识别标记,信号和其他所有内容,而且还应该能够快速
应对道路上的异常情况。 即使开发了多年的机器人也不能总是充分地应对这种情况。
Uber机器人汽车就是一个例子,该机器人的软件决定忽略道路上的隐性物体,该物体原来是穿着深色衣服的女人,甚至是在错误的地方过自行车的人。
当前,习惯上将机器的自治分为六个级别-从零(所有操作均由一个人执行,没有自治)到第五个级别(所有操作均由车载计算机执行,无需人工干预)。 在绝大多数情况下,自动驾驶汽车达到了第二级自主权,包括臭名昭著的特斯拉及其先进的自动驾驶仪。
戴姆勒取得了良好的进展,但其自动驾驶汽车的试验在德国进行,那里的道路标记及其本身几乎是完美的,并且驾驶员通常遵循道路规则。
Waymo也取得了不错的进展-前几天,它
宣布推出了完全自动化的Robotax服务。 没错,驾驶员仍在机舱内,公司称其为“安全操作员”。 如果出现问题,操作员将采取控制措施。 具有更高自治水平的自动驾驶汽车很可能要到20世纪20年代才会出现在公路上,但也许如此。 后来。
最有可能的是,只有在专门的基础设施出现之后才可以实现完全的自治,这种基础设施应该比自动机器人本身更智能。 后者必须独立学习和了解周围发生的事情,然后-在操作员未参与的情况下做出决定。
一个例子是在下雨的夜晚乘客乘坐自动驾驶汽车旅行的情况。 突然,一只猫穿过了前面的马路。 机器人应该做什么? 显然,他的系统必须明确识别前方的障碍,以便机器执行必要的操作。 但是有必要知道当地的速度规则,想像一下沥青有多滑,还要了解此时此刻汽车的位置。 部分信息可以从第三方来源获得(相同的天气预报,温度,湿度和风况),这需要广泛而可靠的Internet通道-最有可能的5G。
除猫咪外,周围可能还有其他障碍物,例如自动驾驶汽车,它们也试图避免碰撞。 也就是说,机器人移动台必须能够“通信”,以便在任何给定时间很好地表示彼此的行为。 而且您需要实时沟通。 否则,不可避免的碰撞会威胁到机器所有者的健康和生命。
另外,机器人还必须能够为到达终点的最佳道路铺路。 这意味着机器需要地图数据,标记信息,标志和其他信息。 为了扩大机器人移动设备的功能范围,它们应该始终保持联系,以便交换有关环境的信息。 但是仍然存在人们控制机器的问题,事实证明,它们还必须配备带有机器人的通信系统-否则后者将无法理解前者正在做什么。
好吧,如果您以为最广泛的通信渠道可能会发生某些事情,即使问题是暂时的,情况也会变得更加复杂。 而且我们还没有提到“台车问题”之类的普通问题,还有许多其他问题。
很有可能,未来几年无法预期AI 4-5的自治程度-它们很快就会出现。