在大学学习诸如电路这样的有趣主题时,我想到它是课程项目“纸上的两轴绘图仪,基于Arduino的钢笔的头”的一部分。 当我开始工作时,我自己仍然模糊地想到了项目的电气部分以及机械部分的开发。 我一生中从未有过这样的经历。 这就是为什么我在网络上找到大量资源(为什么对我来说这是最简单易懂的教程)并决定严格遵循它的原因。 但是,很快就清楚了,乍一看,对于我这样的“工匠”来说,所有简单的事物都不够详细。 因此,在后来出现的问题中,我不得不即兴发挥(并非总是成功),因为后来才证明。 这是一个小背景。 现在,我想分享我在一些关键问题上的宝贵经验。 我不会在此设备的版本中给出全新的说明,因为 在互联网上获得更成功的解决方案。
目录内容
- 建筑施工
- 电路图
- 软体类
1.设计

我选择的设计是由胶合板制成的。 作为轴,使用了双头螺栓,它们由步进电机旋转,因此,螺母上的平台沿轴移动。 一个轴连接到平台,另一根轴带有一个边缘。 从所有这一切的制造中,我可以说:
- 如果上轴在两侧都没有支撑,而是像我的一样被固定,只有一个边缘,那么您需要事先考虑一下轴的平衡。 鞋帮不可避免地会产生脚后跟,如果没有的话,其“悬挂”边缘的重量会使整个结构不堪重负。
- 图案的线条可能会沿着螺柱螺纹的尺寸呈波浪形,以及由于结构本身在操作过程中的抖动。
- 以上两个问题导致了另外一件事:笔(在我的情况下是笔)可能在页面的不同部分书写不均。
- 设备的重量和尺寸也应事先计算,这样以后就不会清楚您的发动机不会承受这种负载。
- 还有一个重要的细节:最好在可能的地方使用螺钉,钉子等进行固定。 胶水上的设计,即使是最可靠的设计,也往往在最意想不到的时刻崩溃。 而且在某些情况下,组装完主要零件后,如果不拆卸成品零件,将很难恢复到很小但很重要的内部零件的“粘合”状态。
- 如果在某处使用胶水,则非常非常小心地注意它不会掉入结构的运动部件中。 即使是很小的液滴也会使该机构停止运转并使其无法使用。
2.电路

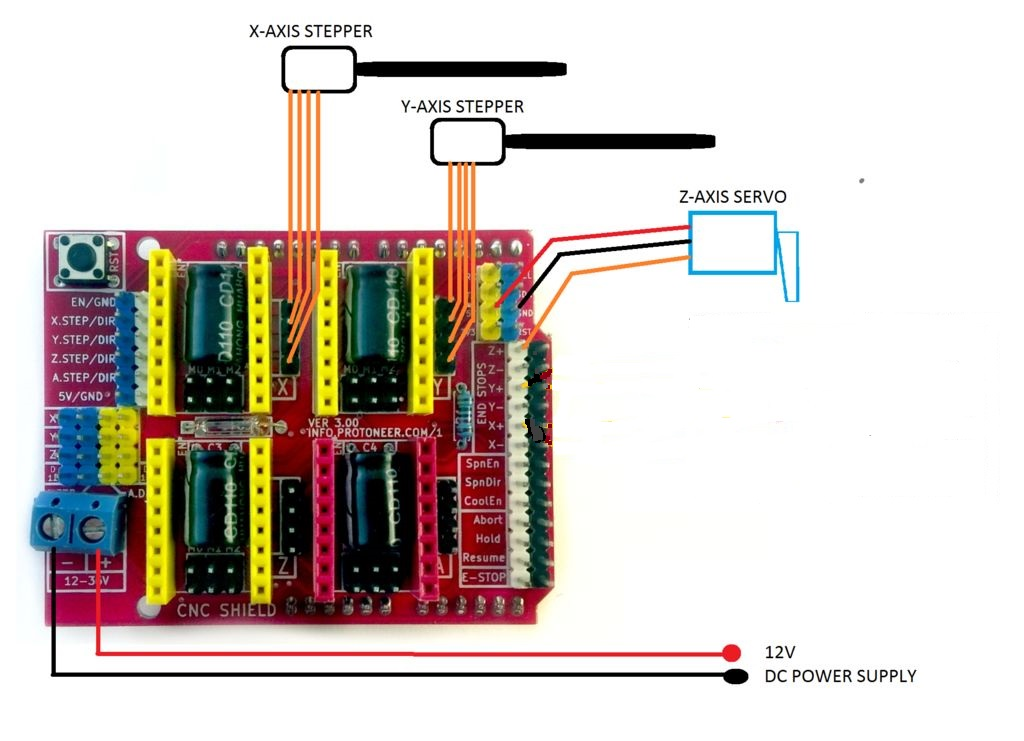
电路本身非常简单,甚至不需要焊接。 我什至拿走了专用于与CNC一起使用的成品CNC Shield。 不过,这里有一些细微差别:
- 我的中文Arduino类似物,代号WAVGAT,用于拒绝像普通Arduino Uno R3一样闪烁的部分。 互联网上声称这种板与所有arduino软件完全兼容,但是要通过IDE与之兼容,必须下载一个单独的WAVGAT更新库。 因此,我设法将草图上载到板上,但是软件本身仍然不希望其正常工作。 我尝试了用于解决此类问题的所有选项(我使开发板的引导加载程序过载,并使用软件更改了开发板文件和库的常量),但结果仍然相同。 显然,这是您必须获得经典Arduino的任务。
- 另一个问题是步进电机的推出。 尽管司机冷漠,他们还是哼着热身,但没有动弹。 有条不紊地检查链条,我意识到问题出在它们的连接上。 事实是,这次中国人也是原著。 事实证明,发动机导线包含交叉线对AB。 如果一对普通的商店引擎按2B-2A-1A-1B的顺序排列,那么出于某种原因,中国人拥有2V-1A-2A-1B。 可以通过在相应模式下用万用表“拾取”电路来确定:成对的AB输出发出吱吱声。
- 然而,事实证明,这种无害的低功耗伺服驱动器具有相当长的过载能力,能够无可挽救地“烧焦”整个arduino板。 在这种情况下,电路板将继续工作,但有时会在中间中断,以伺服命令停止。
- 因此,请在操作过程中监控设备的温度,以避免致命的后果。
3.软件
有以下选项:
- 获得出色的简单BenBox程序的最简单方法。 它专门用于与CNC一起使用,并且易于安装和处理。 此选项的缺点是它的局限性。 首先,软件包中包含板卡的固件已包含在十六进制文件中,因此在编辑时会出现问题。 而且一般的功能不是很广泛,它看起来像一个简单的图形编辑器。 如果您不想深入研究整个机制的操作,则可以使用此选项。
- 通过GRBL固件工作会更加复杂,但也更有希望。 该库可以很容易地在Internet上使用,并且比BenBox提供了更多的功能。 但是要通过这种机制工作,您需要处理所有这一切的初始配置。
- 因此,下载并解压缩grbl-servo库。 现在,您只需在示例中找到它就可以通过IDE将其上传到开发板上。
- 要将命令直接发送到设备,您将需要通用Gcode发送器(或其他类似软件)。 将其安装在计算机上后,我们通过与开发板连接的串口打开与开发板的通信通道。
- 在应用程序的命令行中,对于主板的初始设置和后续设置,键入“ $$”。 通过此命令,我们可以获得完整的基础板设置集,可以通过设置必要的参数来进行更改。 例如,命令“ $ 110 = 380”和“ $ 111 = 380”将发动机在X和Y轴上的速度设置为380 mm \ min。 重要的设置是引擎的速度和加速度,轴的方向(正向或反向)。 可以在Internet上找到有关此设置的更多说明。
- 也可以通过发动机(“机器控制”选项卡)和伺服器(命令M5(旋转至初始位置)和M3 s90(旋转90度或任何其他角度))进行机器控制。
- 接下来,您需要准备工作图像。 为此,您还需要额外的费用。 软件,例如Inkscape。 它与任何其他图形编辑器相似,您也可以在Internet上了解有关使用它的更多信息。 但是有两个重要的要点:
- 首先,您需要在属性中设置正确的页面大小,以使图像的大小不会超过绘图仪的功能。 还需要以毫米为单位替换像素。
- 创建图像后,按ctrl + shift + C并转到菜单-扩展-MI GRBL ...-设置引擎的速度和伺服器的旋转角度-将图像保存为gcode格式。
- 最后,我们返回通用Gcode发送器,并在“文件模式”选项卡中,打开我们的gcode-image。 使用“可视化”按钮,您可以以图形方式监视程序的运行,并且在“命令表”窗口中可以跟踪命令执行。 剩下的只是运行所有这些步骤并观察结果。
结果,在这样的设备上的工作被证明是困难且费力的,并且最终结果并不理想。 但是这样的经历很有趣,而且并非没有用。 因此,我希望有人会派上用场并帮助避免不必要的“欺骗”我的建议。