 继续,最简单的结束!
继续,最简单的结束! 现在到了最困难和最有趣的时期。 如果您懒于阅读,那么下面(靠近文章结尾)将提供指向该视频的链接,其中包括所有内容的结果和解释,包括第一部分中的描述。 如果您有兴趣,请继续。
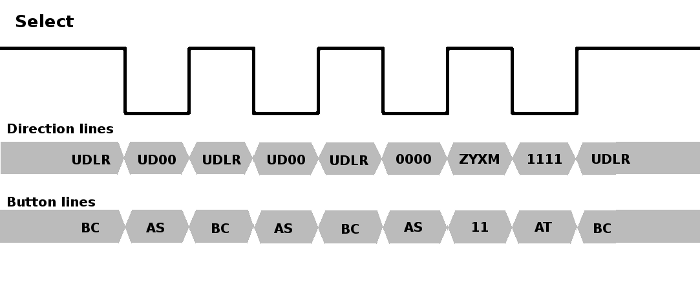
在6键模式下,读取以4个周期或阶段进行(如果以仿真器的语言表示)。 即,每16毫秒,选择输出的状态就会有一个周期性(4个周期)的变化,并且控制器输出上的每第四个周期都会出现附加按钮的状态。 为了清楚起见,以下是阅读表,必须重复进行:
最好有一个逻辑分析仪,在这个分析仪的帮助下,我发现了一个错误,这个错误的体现是周期没有退出第四阶段。
我不会在丛林中奔波,我将立即列出此功能:
static u32 read_pad_6btn(int i, u32 out_bits) { u32 pad = ~PicoIn.padInt[i];
让我们分析任何条件,例如:
if (i == 0 && phase == 1 && !(out_bits & 0x40))
在此检查我们正在从第一个游戏手柄
(i == 0) ,第二个阅读
阶段(phase == 1)进行读取,并且Select输出必须设置为0
!(Out_bits&0x40) 。 为了了解它在模拟器中的工作原理,我在Xubuntu上编译了代码,并设置了多个断点,然后在调试模式下运行了Visual Studio Code。 结果是一幅美丽的图画:

实际上,工作的结果是:
在这里,我必须对仿真器本身说几句话。 我可能没有弄清楚,或者这是一个错误,但是仿真器最初以3按钮模式加载,即使全局设置中指示相反。 对于99%的游戏来说,这就足够了。 为了使用6键游戏手柄进入操作模式,您需要进入设置并返回游戏,而无需进行任何更改。
但是有一种游戏不在这种背景下,那就是《迷失的维京人》,X,Z和MODE按钮可以在其中正常工作而不会跳舞。
聚苯乙烯但是您可以做得更轻松,因为一个人已经编写了一个用于玩游戏手柄的
驱动程序 ,而且级别很低。 我离这还很远。
感谢您的关注!