使机器人尽可能像人类的想法比机器人本身更早出现-在KarelapekRUR(该术语也由apek发明)的戏剧中,机器人与人类完全相似。 但是真的需要类人机器人吗? 机器人在哪里使用,为什么他们会如此st小气? 我们在一篇新文章中讲述。

汽车装配,货物运输和其他程序的执行中的专用机器人在处理任务方面比人要好得多,但是除了执行职责范围狭窄之外,这种机器人也不是一件好事。 如果我们需要最通用的机器人,它应该在人类环境和基础设施中感到舒适,这意味着它需要像人一样-最终,机器人真空吸尘器将无法将杯子拿下,机器人焊工也不会说出如何去图书馆。
明亮的历史机器人人物
1927年,即编写
剧集 RUR的七年后,美国西屋电气公司推出了Herbert Televox先生-一种通过电话接收信号的机器人,该电话激活了嵌入其中的程序。 根据创建者的说法,Televoks可以打开火炉或检查灯是否在房子里工作。 在某种程度上,Televox不仅是机器人,而且是智能家居的组成部分。 Televox中的拟人化只是没有用的装饰。
 Televox之一,其创建者Roy Wensley。 资料来源:Acme Telepictures / NEA
Televox之一,其创建者Roy Wensley。 资料来源:Acme Telepictures / NEA十年后出现在美国的Elektro机器人具有人体大小,可以执行26种不同的动作,包括行走。 它是由声音控制的,但没有对单词做出反应,而是对单词的数量做出了响应-听到了两个单独的单词,包括运动,三个表示停止,说出的四个单词使Elektro恢复了初始位置。 嘴里有一个单独的马达,帮助机器人给气球充气并冒烟。 从那时起,类人机器人在很大程度上保持了娱乐性。
 Elektro机器人及其Sparko机器狗。 资料来源:Daderot / Wikimedia
Elektro机器人及其Sparko机器狗。 资料来源:Daderot / Wikimedia早在1970年,日本早稻田大学就发明了WABOT-1,这是第一台能够承载载荷的人形机器人。 他知道如何用日语进行交流,计算出距离,选择运动方向以及将物体拿在手中。
 WABOT-1是第一个有用的人形机器人。 资料来源:早稻田大学
WABOT-1是第一个有用的人形机器人。 资料来源:早稻田大学现代机器人及其出了什么问题
自Televox先生出现以来已有90年了。 在这段时间里,技术取得了巨大的突破,类人机器人既是而且仍然是娱乐或信息设备,范围非常有限。
近年来,最著名的机器人之一已成为Hanson Robotics的Sophia。 她可以根据自己的经验和来自互联网的数据来表达多达60种情绪,识别语音并生成答案。 索非亚只是一个演示开发项目,可作为促销项目使用-专家表示,尽管索非亚是具有非常特定表情的普通聊天机器人,但索非亚并不知道任何真正有用的东西。
 索菲亚(Sophia)是一个非常情绪化的机器人,但头部后部的透明帽有点吓人。 资料来源:国际电信联盟
索菲亚(Sophia)是一个非常情绪化的机器人,但头部后部的透明帽有点吓人。 资料来源:国际电信联盟由东芝创建的另一位机器人顾问Aiko Chihira具有更传统的外观和更小但更逼真的面部表情。 Aiko于2014年被介绍,并立即引起轰动,六个月后,甚至在东京一家购物中心担任顾问几天。 Chihira的眼睛,头部和手部活动,其中涉及43个电机机构,机器人可以识别声音并以适当的日语或英语提示进行响应。
东芝的Aiko Chihira机器人在CEATEC 2014上谈论自己在东芝,爱子被称为通信机器人。 开发人员期望在服务领域以及医学领域使用此类机器人顾问来监视患者并与患者进行沟通,但是所有这一切都将在不久的将来发生。 Aiko不知道如何走路,现在只能执行固定的问讯处的功能。
 Aiko Chihira在购物中心的临时工作场所。 资料来源:东芝
Aiko Chihira在购物中心的临时工作场所。 资料来源:东芝还有许多其他人形机器人,它们鲜为人知,但同样有趣:Actroid-SIT在对话过程中注视眼睛并可以触摸对话者,而Harmony成为第一个能够支持有关顽皮话题的对话的亲密机器人。 但是在当前的技术发展水平上,所有这些都是昂贵的固定对话器,仅此而已。 科学家梦想着救援机器人在瓦砾中挣扎,研究机器人在极端条件下使用工具,辅助机器人重复人们的体力劳动。
通用拟人机器人是一组非常复杂的肌肉骨骼系统,机械肢体,语音识别系统,空间和神经网络,可以处理并理解环境和语音命令。 另外,在这些领域已经取得了某些成功。
因此,现代机器人可以在诸如Siri之类的语音助手级别上维持对话,但是到目前为止
,机器与人之间的对话远非两个人的对话。
在过去的30年中,两条腿的直立姿势也有了很大的飞跃-至少值得比较本田E0和Atlas奔跑的悠闲动作。 但是,为了确保这种机动性,Atlas接收了80公斤的设备和约180厘米的高度,这可能是我们这个时代最令人印象深刻的机器人? 现在,只需要携带
五公斤的箱子 。 顺便说一下,仔细看一下机器人的头部-激光雷达在那旋转,扫描周围的空间,并绘制出周围世界的三维地图。 这使机器人可以尽可能准确地对障碍物做出反应,即避开或越过障碍物。 我们在有关
无人驾驶车辆的材料中讨论了激光雷达的工作。
 因此,SpotMini凭借Velodyne VLP-16紧凑型激光雷达看到了世界来源:波士顿动力视频的镜框
因此,SpotMini凭借Velodyne VLP-16紧凑型激光雷达看到了世界来源:波士顿动力视频的镜框最大的困难是机器人的大脑。 机器可以对人和家具做出充分的反应,避免危险,说话,或多或少地了解他们想要的东西。 但是现代人形机器人的独立性水平大约只有一个两岁大的孩子-他会想拿一个立方体或打开门,但是机器人没有能力执行一个清晰的程序无法提供的更复杂的东西。 机器人需要很多年才能拿起普通的建筑工具,而无需外界的任何帮助来建造简单的棚屋。
如果我们结合最现代的组件来创建拟人化机器人,那么结果将是价格非常便宜,不是非常聪明,不是那么聪明且不是那么有用的生物。 例如,每辆本田Asimo(一个可以走楼梯并踢球的小型机器人)的价格为一百万美元,您可以以每月15万美元的价格租用它。 不幸的是,结论很平庸:现代人形机器人仍然是专门的机器(la la a consultant机器人)。 创建真正的通用机器人不允许技术和财务方面的考虑。
机器人的“险恶谷”
机器人不需要人类外观元素,即皮肤,眼睛,头发,它们无非是为了增加机械装置吸引力的装饰。 大多数拟人化的机器人都是裸露的骨架(请参阅“俄罗斯Fedor”,“波士顿动力”的Atlas,本田Asimo的案例)。 无皮框架结构简化了部件的使用,通过消除面部表情促进了开发,并消除了潜在的
险恶山谷问题。
这个术语指的是看起来和行为像人的对象使观察者感到厌恶的效果-因为它们还不够像它们。 该效应的名称来自日本科学家森正宏(Masahiro Mori)在一项研究中提出的图表中的失败。 他在1978年进行了一项调查,结果显示,在某个时刻,机器人与人的相似性不再吸引,而是相互排斥。 对于这种心理机制,仍然没有公认的解释。 假定一个人在不知不觉中注意到了其他人从某种熟悉的常态上的外部偏差。
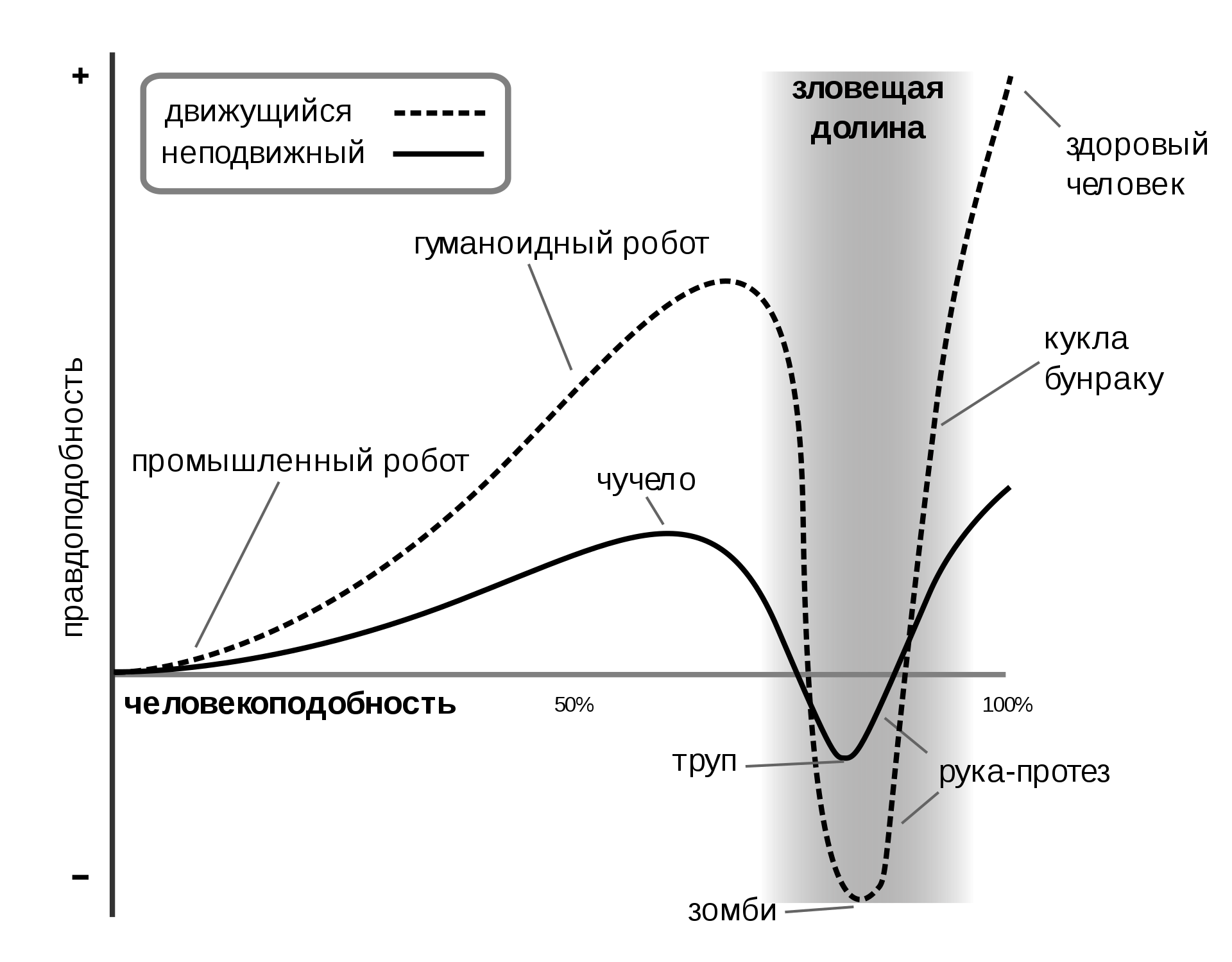 森正宏弘研究的图表反映了一个人对人造物体的同情,取决于它们与人的相似性。 资料来源:Wikimedia
森正宏弘研究的图表反映了一个人对人造物体的同情,取决于它们与人的相似性。 资料来源:Wikimedia在某种程度的对象真实性上,人脑认为一个活着的人就在它的面前。 但是随后我们看到不自然的手部动作,“死”的面部表情和不人道的声音,这会导致认知失调,表现为恐惧和敌意。 机器人创造了一个人的错觉,我们下意识地不再了解我们面前的事物,对此我们感到威胁。
拟人化机器人已经存在了很长的时间,现在它们比人类更像过去了。 向外。 从功能上讲,任何机器人都输给任何专门的机器人和人-尽管有相当长的机器人历史,但通用助手的梦想仍然是梦想。
最后,是片刻的幽默-威尔·史密斯和机器人索非亚之间的一次会面。 对于机器人,“搭便车法”(Hitch Method)可以这样工作。