在
上一篇文章中,我们研究了基于急剧加速和制动的评分算法。 使用该算法的计分结果与事故发生的可能性弱相关。 在本文中,我们将基于速度,发动机速度和加速度计性能的值,转向更高级的驾驶方式分析算法。

为了进行分析,我们将使用43,000名汽车共享用户的250,000次旅行数据,其中250人是事故的罪魁祸首。 Remoto远程信息处理设备安装在分析的汽车上。 在本文中,我们将考虑两组驱动程序-积极进取和整洁。 侵略性驱动程序定义为反复违反交通规则的驱动程序。
首先,我们分析未发生事故的用户和负责事故的用户的平均速度和平均速度。
 图1.平均速度
图1.平均速度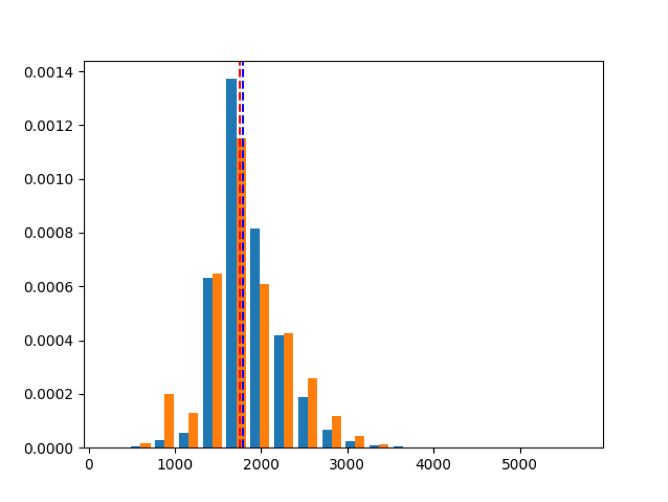 图2.平均发动机转速
图2.平均发动机转速在直方图1和2上,蓝色和橙色分别表示未发生事故的用户和发生事故的罪魁祸首,其中的虚线是中位数。 可以看出,有事故和无事故的用户的平均表现略有不同。 这表明大多数路由驱动程序都以相同的方式驱动。
接下来,我们选择了10个驾驶员:5个具有激进驾驶风格,5个具有沉稳驾驶风格。 对这些用户组路线数据的分析显示了一个有趣的功能-出行的前5秒,积极的用户获得更快的速度,并保持更高的发动机速度。 此外,当汽车完全停止行驶时(在交通信号灯处或旅行结束时),激进的用户会以极大的加速度减速。 对于速度,发动机速度和加速度,我们使用以下值进行分析:
在我们的测试样本中,可以清楚地看到攻击性驾驶员在路线开始时的最高速度以及其余部分的最高加速度都远远高于其余道路。 结果,我们决定为所有250,000条路线计算这些值,将数据分为两组:事故的罪魁祸首和普通用户。
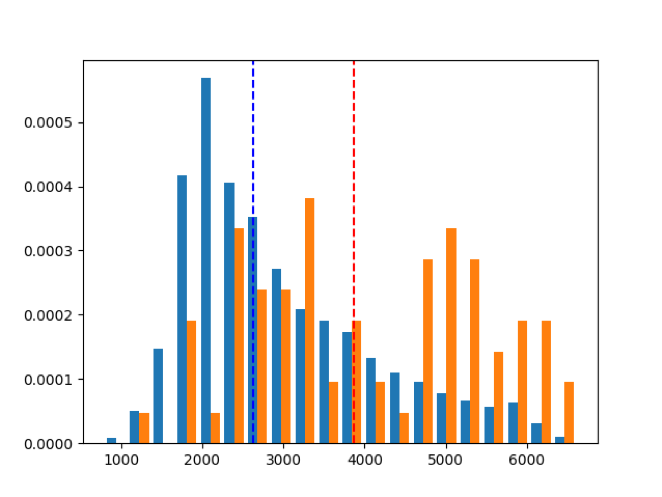 图3.行程开始时的最大速度
图3.行程开始时的最大速度条形图3显示了最大发动机转速的分布,橙色-负责道路交通事故的用户的行程,蓝色-所有用户。 虚线是中位数。 您可以在发生事故的人员的右边看到一个明亮的转变,即 在出行的前5秒钟内,这些驾驶员将速度保持在其余速度之上。 同一组中有36%的驾驶员在路线开始时的速度高于4800,而正在考虑的所有驾驶员中只有9%的驾驶员有这样的转弯。
同样,最大加速度。 条形图4显示了最大加速度的分布。 那些负责交通事故的人比其他人具有更高的加速度。
 图4.行程开始时的最大加速度
图4.行程开始时的最大加速度现在,我们将不仅考虑行程的开始,而且还将考虑从完全停止的时刻到完全停止的五秒间隔之间的所有五秒间隔。 对于开始运动的每5秒钟,我们将计算发动机转速和最大加速度的最大值。 然后,为每个用户找到最大值。
运动开始时的最大偏差由最大转数显示,而停止时则是最大加速度。
 图5.开始运动时的最大发动机转速
图5.开始运动时的最大发动机转速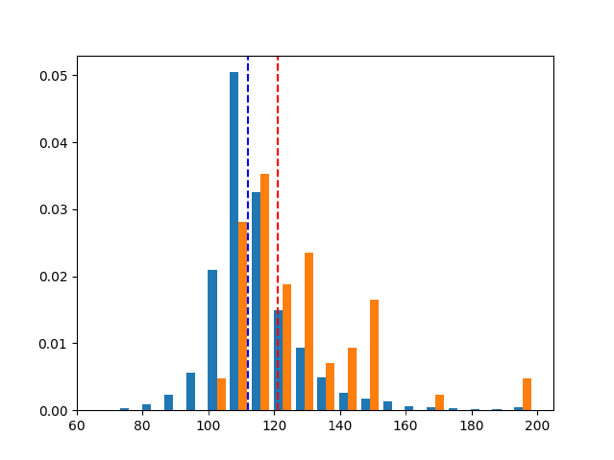 图6.停止时的最大加速度
图6.停止时的最大加速度结果,事实证明,当80%的犯有交通事故的驾驶员转弯时超过5,000转,而只有20%的驾驶员犯有此类事故的转弯,换句话说,80%的交通事故罪犯的驾驶员属于所有用户的20%。 此外,尽管所有用户中有10%拥有这样的速度,但负责交通事故的驾驶员中有52%的速度超过5800。 在停止时加速的情况与此类似,尽管换挡幅度较小,但60%的事故驾驶员显示超过120的加速,而只有20%的驾驶员在停止时具有这种加速。
我们考虑到由于激进驾驶员的性能变化很大而产生的最大值,一个激进驾驶员的数据偏差始终高于平静驾驶员的数据偏差。 换句话说,冷静的驾驶者通常以相同的方式驾驶,而积极的驾驶者既可以冷静地驾驶也可以非常极端地驾驶,很难说出其原因和影响因素(可能会有情绪,仓促等)。
我们检查了行程中的起止点,相对于驾驶员整体而言,发生事故的驾驶员的偏差较大。 具有进取心的驾驶风格的驾驶员通常是事故的肇事者,根据事故发生时最大速度的值,造成事故的驾驶员中有80%属于侵略者。 这组驾驶员应注意汽车共享运营商,因为 对他们而言,事故永远是损失。
此行的其他重要元素是转弯,我将在下一篇文章中讨论。
发表者:Kirill Kulchenkov,
kulchenkov32 ,Bright Box商业顾问。