通过编程,我们指的是用C语言对小型微控制器进行的实际编程过程,以及跟踪印刷电路板,在Solid中绘制模型,在Office中编辑坞站,阅读Internet并编写本说明。
该设备是UNIX FIT MX-450V,或简称-* UNIX,在其上执行编程过程。

总的来说,这是关于“关于程序员的正确工作场所”主题的第1001个演示。 该设备的所有组件在文献中已多次描述,没有提出革命性的成就,但是给出了安装和使用的总体成功经验。 该设备非常经典-升降台和下方的跑步机。 照片-部分来自网络,部分来自我的工作地点,对于低质量,我先表示歉意-杂乱无章的灯光+可怜的照明+我,我根本不是摄影师。 砍伐之下-很多细节,包括活体腺切除术和集体农场的要素。
正当性
随着年龄的增长,我学到了很多坏话:痔疮,前列腺腺瘤,腰椎骨软骨病,心绞痛,心律不齐和失眠。 这并不意味着我能够充分体验它们的所有魅力,而且我也没有令人信服的科学事实来证实它们久坐的生活方式不可避免。 但是,模糊的主观感觉有时会激发更强烈,更具体的逻辑论证。 是时候该采取行动了。
但是,对于那些坚强且意志坚强的人,每隔45分钟准备好一次跳进去锻炼体操,以及每周去3次去健身房,我在下面写的内容可能就没有那么重要了。
来源选择
开始选择跑步机时,我面对的事实是,对于没有准备的用户来说,它们都是一样的,如何选择它们还不清楚。 与卖家更紧密地相识之后,他们发现他们也完全不知道所售商品,在他们发现我的体重不超过100公斤,并且我需要电动而不是机械轨道(这就是他们的所有分类功能)之后,结束),然后立即枯萎并读经典-随心所欲。
我喜欢UNIX的原因如下:
- 最低启动速度= 0.8 km / h。 这很重要,因为我编程的速度并不快,而且大多数编程速度都高达1 km / h。 并非所有曲目都能如此缓慢地进行。
- UNIX在表面的倾斜角度上有电气变化。 我还不经常使用它,但是在编程过程中爬到桌子底下某个地方并在其中手动调整一些东西的想法在我看来似乎完全排除了倾斜更改这一主题。
- UNICS结构易于拆卸-这非常重要,因为您将不可避免地要把手放在它上面,并且非常令人高兴的是,无需拧磨机和焊机就可以通过拧动钉子来完成所有操作。
- 船尾上的精美手柄可将设备提升到垂直位置。 在将UNIX清理到UNIX之下时,非常方便。 有点琐事,但非常好。
- 名字 坦白说,选择中的情感成分也存在。


有了桌子,变得更容易。
最简单的查询“电动桌”会推出精美的办公室,其中一个是“ Ergostol Duo”,由三个按钮控制:“上”,“下”和“请让我现在移动这张桌子”(圆形)。

为了不拉扯,这是初始测试期间的总体布局。
显然,所涉及的空间很小。 左边是书架,右边是桌子,上面放着烙铁,文件,示波器和相关的垃圾。 (由于某些原因,无法在UNICS上工作。)
安装与设定
安装UNICS时,首先要断开喇叭,这样他就不会爬到桌子底下。 幸运的是,它们安装在螺栓上,通过卸下塑料侧盖即可轻松够到。


撕下喇叭,重要的是不要断开与遥控器的电线连接,必须将它们从塑料“扎带”上轻轻松开,然后到达连接器,尽管该连接器上覆盖有热熔胶,但仍很容易断开连接。

您需要从破损的上部挖出一个漂亮的遥控器(安装在4个螺钉上),折断两个好的扬声器,但是我不得不扔掉剩下的熨斗,我没有找到合适的应用程序。

这是遥控器,稍后会派上用场。

尽管具有优雅的设计,但没有什么理由值得高兴:显示器呆板,并且不幸的是,按钮是最经济的类,只是贴有薄膜凸起的贴得很烂的东西可以按。 但是两个主要的元素很大,并以绿色和红色突出显示,这很好。 从理论上讲,仍然有各种各样的好东西,例如训练程序和音乐播放器,但是在现实生活中,对于编程而言,这都是多余的,在工作计算机上的音乐要方便得多。
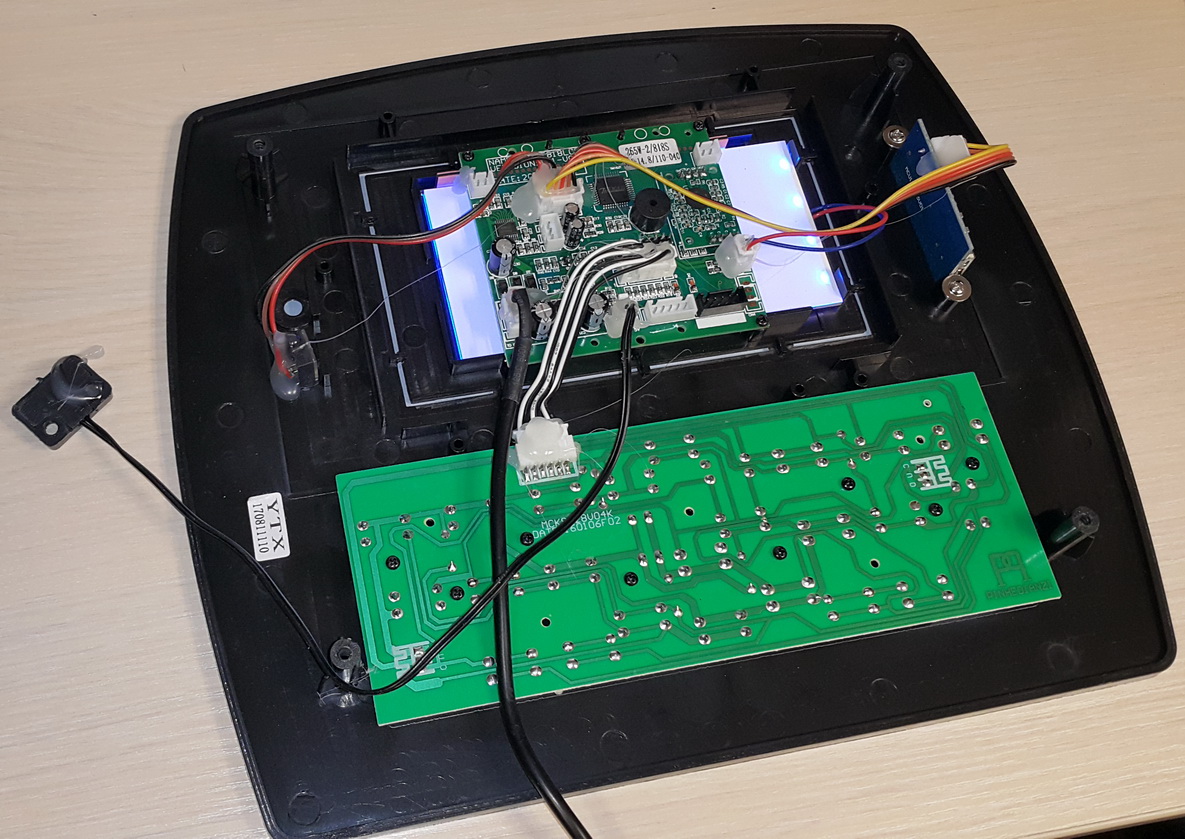
在控制台的背面,您可以看到所有这些不需要的内脏,但是最好用一块塑料/木头覆盖,因为四个用于自攻螺钉的支架可以轻松地做到这一点。

斯大林主义者的下一个打击是如何正确放置此控制面板。 曾尝试过进行某种方式的附加,但事实证明,他根本不在桌上摆放任何东西-这不是将蓝屏直接照在程序员眼中的问题,并且显示器已经在尝试。 将其拉到桌子下面是不方便的,因为便宜的屏幕只能在特定的角度看到,也就是说,在桌子下面根本看不到数字。 找到了正确的解决方案-在编程人员的左边,屏幕朝天,就像桌子的延续。 因此,它不会在您的眼中闪耀,并且当您想与他交谈时,没有问题,所有数字都很引人注目,并且按钮就在手边。 是的,我需要一个矩形硬铝管形式的支架,但是我认为任何事情都可以做,例如木板的粗俗碎片。

我并没有为提供程序员与遥控器的紧密联系的传感器而烦恼,我只是将其粘贴在遥控器枪口的双面胶带上,它看起来既美观又科学,不干扰科学,并且在我的编程速度下,速度从0.8到2 km / h似乎是可选的。 但是,一切都是个体的,如果一开始的编码人员对这种编程风格感到不安全,那么最好将其附加到某些衣服上。 他不太可能从跌落中解救出来,但是他可能会保护他免受在跌落而昏迷的程序员的带领下旋转磁带所花费的过多电力。 无疑令人感到安慰。
在初始测试期间,我们发现Ergostol工作台的高度只能在66至120厘米之间调节,这当然是很小的,因为我们不会忘记编程不是在地板上进行,而是在UNICS上进行,其表面高度距地板约15厘米。 一张更高的桌子立即花费几乎两倍的费用,却没有做到这一点。 怎么办 我们使用环保技术-将美丽的粘胶条(横截面15 x 15厘米)放在Ergostol的腿下!

一切都平稳站立,不会摇摆,最后,坐着和站着的高度非常舒适。
是的,是的,坐也是必要的! 我知道尝试将这种“运行中”技术引入编程的尝试,但最终以失败告终,因为“坐下就坐”状态的每一次变化都伴随着将跑步机拖到房间的另一端。 当然,很长一段时间没有足够的热情。 因此,通过将一个地方应用于另一个地方,结果证明,沿着胶带边缘的保护盒理想地与普通办公椅(如官僚)的双腿之间的距离重合。


在UNICS上正确安装官僚机构时,应附有一些其他实用程序,以防止在最关键的时刻自发卸载官僚机构。 因此,使用了两块由PVC制成的小的白色塑料板,将其粘在双面魔术贴上的侧壁上。 (任何一种板材都可以,但是只有5毫米的PVC板材才可以进入我的手中。)
现在,官僚的双腿并没有滑脱,即使您需要将一只手放在另一只手上,指南也是如此,您不必瞄准太多。 “坐下”过程被简化到最低程度:
- 按下遥控器上的按钮,UNICS停止;
- Zhmak-Zhmak遥控器上的两个按钮,将桌子放下;
- 用一只手抓住官僚,将他放到UNICS上。
仅此而已。
过程“搞定”-我们以相反的顺序执行堆栈,从移除下表中的官僚开始。

瞧,程序已归档。
我再次为所描绘的质量表示歉意,但这是现实,也就是说,尽管工作混乱的局面极为局促,但该技术已扎根并且运转非常成功。
特色功能
UNIX非常安静和体贴。 也就是说,在编程过程中,它不会发出任何分散注意力或烦人的声音。 相反,略微听得见的满足的隆隆声营造出一种和平而积极的情绪。
UNIX嫉妒。 就是说,如果它正在运行,并且我轻而易举地走到一边去做点什么,它就会开始发出咕unt声,吱吱作响,并通常表现出不快。 纪律:如果您想退出比赛-停止前进,然后继续做生意。
UNIX是传统的。 至少我们众所周知的论点“您不会刷牙-您不会去”是完全合理的。 交付套件中包括两瓶含硅油的瓶子,因此您不必略过(按照说明-时不时滴下),而是从一开始就倒油! 在第一瓶酒的某个地方,马斯洛尔结束了,不愉快的咕unt声和尖叫声停止了,所以设计进入了模式。 好了,大约六个月后,您需要收紧胶带,以使胶带顺畅且不会下垂。
UNICS必须旋转才能对其编程。 在固定的UNIX上进行编程完全没有帮助,但相反只会恶化,腿开始酸痛,情绪下降。
结果
出乎意料的积极。 也就是说,事实证明,连续步行3-4小时,完全注意到疲劳,我没想到自己会这样。 第二个启示-购买之前,在网络上浏览这些有趣的上升桌的图片时,我没想到它们后面会有任何稳定性,因此我预先准备将桌子以上升位置钉在墙上,以便在打字和移动鼠标时屏幕不会抖动。 令人惊讶的是我不需要为什么,但是我仍然不知道结构的总质量是否足够,或者将身体的上半部分靠在桌子上是否对振动显示器产生主观的舒适感,因为它与我的整个whole体一起振动,我不知道。 但是戴眼镜和不戴眼镜的过程都相当舒适。 最重要的是,我担心使用这种“垂直编程”,PCB跟踪将无法进行,因为该过程在很大程度上取决于精确的鼠标移动。 但是,不,一切正常,也就是说,通常可以进入,状态,鼠标移动清楚,没有分散注意力,此外,还出现了意外的红利-腿部对音乐的节奏性运动(嗯,手动追踪始终对音乐)以其自身的方式有助于创作过程然后以某种方式“推”他。 当然,所有这些都是主观的,没有足够的统计数据可以得出任何具体结论。 然而,这些“舞蹈编程”或“ Unixoids的创新行军”仍有待了解,也许这就是事实。
原来的主要编程模式是步行,仍然不可能跑得太快。 也就是说,“散步” 3-4小时是完全现实的,完全不注意时间和脚下正在发生的事情。 然后-开会,但时间不长,即使考虑到额外的枕头,官僚仍然不是最舒适的编程环境,下背部麻木,您真的想睡觉。 大约20到30分钟,就是这样,放松结束了,您可以继续跳舞几个小时的编码器,通常来说,几乎不会感到走路感到疲劳。
当然,幸福感的改变会带来积极的影响-所有主观诊断都已明显消退,有些则基本消失了。 目前还没有负面影响,但是可以预料的是,因为UNICS工作磁带的资源尚不清楚,最终结束时该怎么办。 我也很警惕,从编程的步行形象中寻找对我绝对不像运动员的car体的长期后果,尽管它似乎也消失了,但是我们仍将继续观察它。 此时的测试时间为1年,而飞行正常。
庞大的计划
在接下来的一年中,我想朝着以下方向改善宇宙:
- 最简单的自动化操作,只需短按一个按钮(而不是一长两对),桌子就可以升降到固定水平,
- 以某种方式规范化了悬挂的爬线器,可能会装上一些漂亮的盒子,然后将所有东西放进去,尽管总的来说,所有事情都是这样,但在下降过程中并没有伤害到任何东西。
- 详细处理倾斜的编程模式,即研究过程如何在UNICS的不同倾斜角度下发生。
好吧,如果有人分享类似的经验和成就,那将是一件很高兴的事情。