与广泛传播的针对道路交通事故受害者的零容忍计划相反,世界范围内的死亡人数继续增长。 不仅由于第三世界国家,而且由于实施零愿景的国家,近几年来,死亡人数已经停止下降,甚至开始增加。 运动方向存在明显的危机。 我们将通过分析改善道路安全(BDD)的主要公认概念来研究其原因,并考虑一个新概念:
- 罚则
- 通过改善运输和基础设施来提高安全性
- 通过错误的传输和基础设施提高安全性(零愿景)
- 用计算机代替人类驾驶员的前景
- 新概念:“代替安全的汽车,而不是安全的运输系统”
关于作者
 作者:Krivosheev Roman Vasilievich,发明家。
作者:Krivosheev Roman Vasilievich,发明家。
STI技术竞赛“ Winter City”( upgreat.one竞赛的举办地)参与者的ITS SPRUT团队负责人
作者是解决运输问题的根本新方法的发明者,因此是所提供信息的主要来源。 项目网站ekologurban.livejournal.com
由于该项目有数十项世界上没有类似产品的创新,因此计划了一系列文章。
这是该系列的第一篇(综述)文章。 所有图片都是可点击的。
分析现有道路安全概念
从历史上看,第一个概念是加强惩罚。 长期以来,效率低下是显而易见的:即使将所有罚款加在一起,再加上对责任人的处决,也无法使死于事故的单个人复活。 是的,任何紧缩工作都需要三年,之后人们就会习惯它,一切都会重新开始。 也就是说,第一个概念根本不起作用。
到20世纪60年代,已经无法忍受死亡人数的迅速增加,汽车制造商开始认真提高汽车的安全性(安全带,安全气囊,ABS等)。 而且汽车本身开始考虑变形区域。 挡泥板和分隔障碍出现在道路基础设施中。 到九十年代,很明显已经达到了汽车被动安全的物理极限。 这就是为什么以110 km / h的允许速度进行碰撞测试的原因
时速仅为60 km / h。 因此,第二个概念非常有效,但是其功能几乎完全用尽。
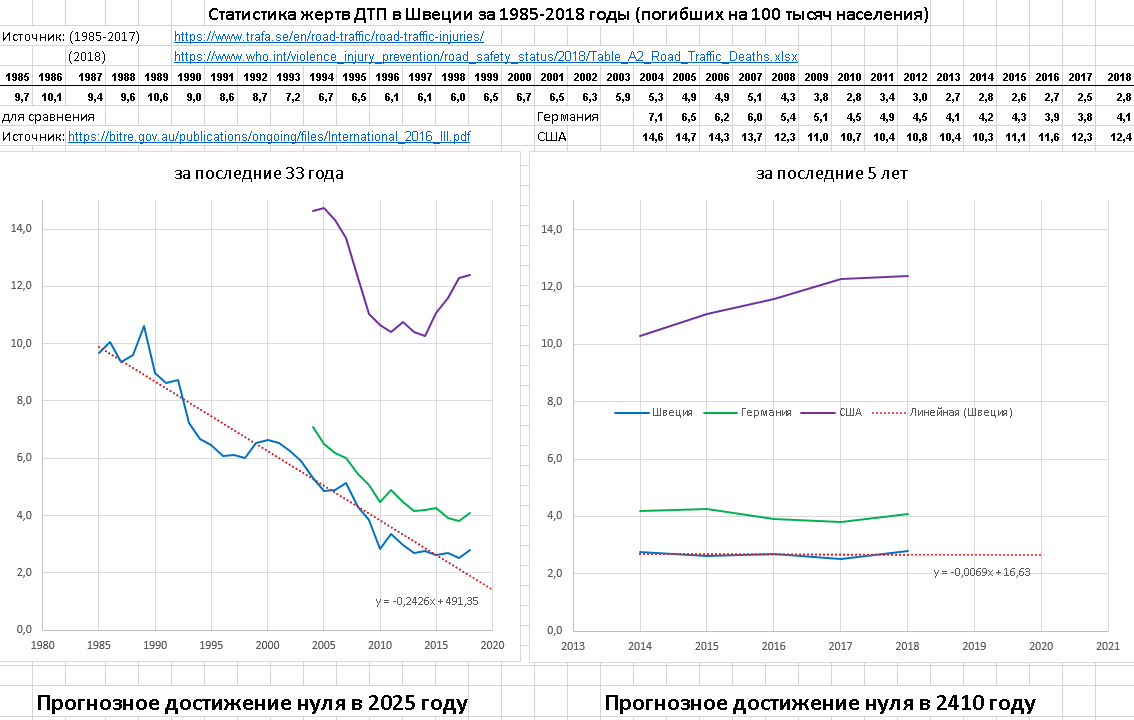
在千年之交意识到这一点,而不是寻求改善运输的新概念,从事运输欺诈的运输民粹主义者开始降低运输和基础设施的特征。 据指出,汽车行驶太快,应通过行政和基础设施措施以各种方式降低这一速度。 瑞典是这一概念的最前沿,瑞典于1997年采用了称为“零视力”的计划。 该目标被宣布为道路交通事故死亡的“零容忍”目标,到2020年达到零水平。 到2020年,该计划显然已完全失败。
如果我们采用有关零愿景的大多数文章,那么安全性“预期增长”的时间表将在2010年或2013年结束。 怎么了 但是因为2013年之后,“零视觉”计划停止了工作! 死亡人数停止下降,并在2013年左右波动。 此外,瑞典的最近5年具有统计意义的预测图仅在2410年才给出潜在的零!
但这不是主要问题,因为尽管如此,仍然可以大大减少死亡人数。 主要问题是,“零愿景”的成功被大大夸大了,并且通常的方法是欺诈。 由于减少交通事故受害者的人数并不是由于安全性的提高,而是由于运输和运输基础设施特性的下降。 但这与通过钝化锯齿来提高锯的安全性相同。 是的,它会更安全,但由于切割会变得更糟。 这就是“零视觉”产品的所有精髓! 亲眼所见,零号愿景的所有四个领域都是这样的欺诈行为:
- 视觉零号要求将运输速度降低到安全的50甚至30 km / h。 但这是荒谬的! 然后让我们立即将速度降低到零,甚至禁止汽车。 没有汽车,没有汽车被杀死。 也就是说,最好的药物是断头台。 但是在此之前(在第二个概念中),开发了解决方案以提高安全性而不降低速度。
- 视觉零号可以对行人和车辆进行猛烈的粉碎,使所有的人行横道都不是街道。 是的,行人安全性会提高,但会以降低行人舒适度为代价。 而且,对于老年人来说,这通常是致命的,因为不是每个人都可以亲自上三楼然后下楼。 甚至在小而富裕的瑞典,路外交叉口的高昂价格也使我放弃了这个想法。 但是,在许多国家,他们向零视线致敬,他们继续前进。
- 视觉零号提供了所有郊区道路,中间有分隔屏障。 这个主意很好,只有为了超车,所有道路都必须采用四车道(每个方向两车道)。 但这对于一个小而富裕的瑞典来说还是太昂贵了。 因此,他们决定保留而不是四车道,而是三车道,且带有“游荡的中间车道”。 这增加了安全性吗? 是的,它已经增加了,但是只有这样,吞吐量才减少了三倍! 支付了三个频段,吞吐量为两个频段。
- 歧视驾驶者。 这里没有评论,任何歧视都是不可接受的。 但是欺诈的原理是相同的,我们以牺牲另一种为代价来改进一种。
是的,当然,安全是最重要的且昂贵的,但是您需要了解零视觉解决方案是非常无效的,不能解决问题,只能解决昂贵的拐杖。 问题在于,这些决定几乎没有任何其他选择,因此几乎完美无缺地传播给了其他国家。 尤其是,这些想法恰恰是在俄罗斯NTI路线图中阐明的,在此基础上,根本就没有考虑其他改善道路安全的概念。
零号愿景的欺诈性质已不是秘密。 在许多国家(例如在美国),对该计划的实施遭到不同意该计划的人们的积极抵制。
如果您查看世界上富裕国家的安全图表,我们会发现死亡人数最近在每个地方都趋于稳定并停止了下降(美国的轻微增加与廉价汽油导致的汽车行驶里程显着增加有关,并且每单位英里的死亡人数实际上没有变化以及在美国)。 是的,这种稳定发生在不同级别的不同国家。 而这个水平直接取决于在不同国家使用汽车的强度。 并非21世纪的每个人都希望以行人的速度生活在19世纪村庄的节奏中。 而这正是“零愿景”的重点-使运输速度与行人和自行车的速度相称。
幸运的是,最近(即将到来的2020年),甚至在瑞典也已经间接认识到“零视觉”计划的失败。 首先,最后期限被推迟,然后争取零的努力变成了朝零方向的运动。 但是,过去5年的统计数据清楚地表明,甚至没有零变化的趋势。 因此,“零视觉”概念是一个骗局。 而且,最重要的是,即使这种欺诈行为也已停止。
因此,现在他们越来越多地谈论自动驾驶仪在改善道路安全方面的作用。 现在和现在。 但是在这种情况下,我们也在谈论欺诈。 关于自动驾驶比人更好的说法并非基于事实(因为还没有自动驾驶,所以没有事实可以证明他比一个人更好)。 所有公关都建立在Ilon Mask的“愿望清单”及其统计数据的欺诈上。 但是,使用特斯拉自动驾驶仪发生事故的频率较低的统计数据是欺诈,因为伪自动驾驶仪仅在简单的天气和道路条件下工作,而发生事故的可能性极低。 当伪自动驾驶不起作用时,大多数事故恰好发生在恶劣的条件下,当然,这些事故不会破坏伪自动驾驶的统计数据。
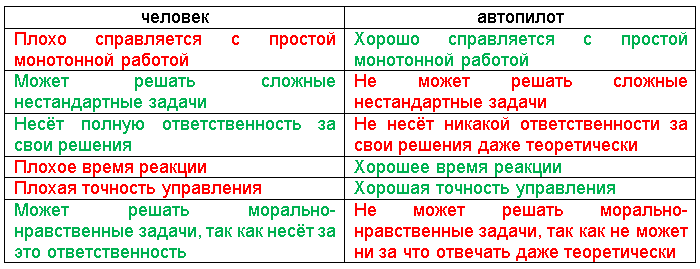
因此,让我们弄清楚“自动驾驶比人类好”这个概念本身是正确的。 实际上,唯一的理由是计算机不会犯“人为因素”错误。 这是事实,一个人没有犯“计算机因素”的错误。 因此,考虑了用“计算机因素”代替“人为因素”。 但是,事实并非如此,总金额是肯定的,尤其是考虑到黑客等。
一个合理的问题出现了,为什么那么把锥子换成肥皂呢? 让我们建立一个表:
此外,自动驾驶仪的缺点在原则上无法解决,因为它们不仅需要强大的AI,而且需要强大的人工意识。 而且他甚至还没有参与这个项目,但是即使它出现了,他也将拥有人格的所有权利,这与他想为一个人工作的事实相去甚远。
因此,即使在一个人与一个自动驾驶仪的利弊上形式上平等的情况下,公关专家也试图说服我们,一个自动驾驶仪比一个人更安全!
即使是公关专家自己也开始理解这一点,在CES-2019上,他们认识到第五级自主权是遥不可及的未来,我们应该专注于第三级自主权( 最终,机器人移动行业将变得更加现实 )。 因此,到2019年,很明显,无限期地推迟由于自动驾驶而提高安全性的有希望的概念。
总结:改善道路安全的所有现有和有前途的概念已经精疲力尽,并且在不久的将来将无法显着提高安全性。 甚至强大的AI也无法解决有前途的自动汽车的主要问题,即在缺乏信息的情况下对实际混乱交通的“分辨率”做出决策的责任问题。
安全的运输系统代替了安全的汽车
但是,并非一切都如此绝望! 对该表的分析显示了一个非常有趣的功能:一个人坏的地方,计算机很好的地方,反之亦然。 然后,有一个合乎逻辑的想法是将两种方法的优点结合起来并消除其缺点,从而实现混合。 因此,鉴于当前和未来的AI开发水平,最大的安全性将不是不负责任的自动驾驶仪,而是一种混合选择:
“人为一切负责。 电子设备会给出提示(标记阅读系统,道路标志,盲点监控等),并可以执行驾驶员的最后命令(停留在车道,更改车道,保持距离,停车)。 电子设备可以明确地阻止驾驶员的危险动作(紧急制动系统)。”
显然,这种潜在的选择不能保证没有死者,因为尽管有人对“ razrulivanie”现有的混乱道路交通的结果负责,但“ razrulivanie”的结果却远非理想。 而且,即使从理论上讲也不可能有序地混乱(托莱利任务)。 因此,我们终于找到了BASIC道路安全问题! 您只需要摆脱道路上的混乱状况! 也就是说,当每个人都按自己想要的方式行驶时,现有的混沌道路交通,并且交通规则仅是建议性的,应替换为“在自动中央调度的控制下最初订购的固定交通”。 计划本身也应草拟成原则上不存在任何模棱两可的情况。 因此,驾驶员只是执行者,仅负责正确执行自动调度决策。 而且由于可以做出决定,即使是一台简单的计算机也比一个人要好得多,因此,成熟的自动驾驶汽车本身就是一种免费的副产品,并且通常不需要任何智能。
这种根本上崭新的概念能够完全解决当前和现在的运输安全问题,其一次性成本比每年因事故造成的官方损失低几倍。 该概念由作者开发,并在完全管制和运输管理的智能运输系统(ITS SPRUT)中实现。 其实质是: 与其对已经犯下的交通违规行为无意义地罚款,我们还需要一种本领域众所周知的“防止傻瓜”系统,该系统甚至不允许您故意违反交通规则。 而且尽管绝对安全的汽车是不可能的(如果您不撞车,它们会撞到您),那么创建一个绝对安全的集中式运输系统很容易,该系统可以确保100%的安全性对技术故障都是准确的。
一个有关经典中央调度属性的小型教育程序:任何这样的系统对其所有参与者都只能是COMPLETE和MANDATORY。 但是,事实证明,绝大多数“专家”对此并不理解。 尽管这些特性非常明显:想象一下,如果调度员仅控制跑道的一半,或者如果至少一名飞行员不遵守调度员的命令,那么中央调度系统将如何在机场工作。
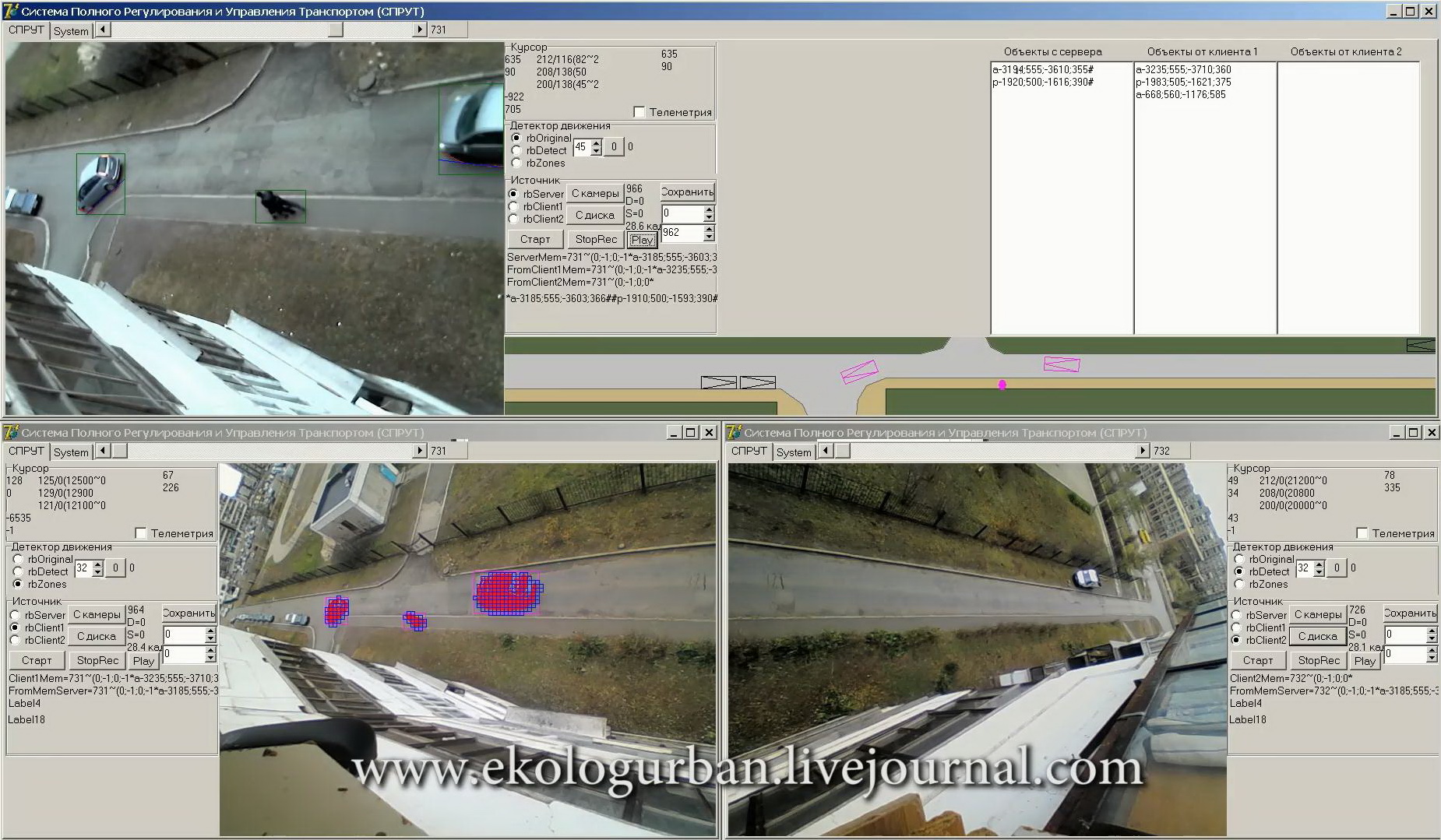
考虑“ ITS SPRUT”的工作原理
首先,我们需要有关交通的完整信息,即使从理论上讲,这也是从汽车上无法获得的(汽车中没有安装任何技术,即使在乘用车后面也可以看到孩子)。 甚至没有希望的“ Car to X”系统也无法解决该问题,因为即使从理论上讲它们也不是完整的,并且在某个阶段它们甚至会降低安全性。

(在中心是从汽车上看到的景象,何时仍然可以停下来)
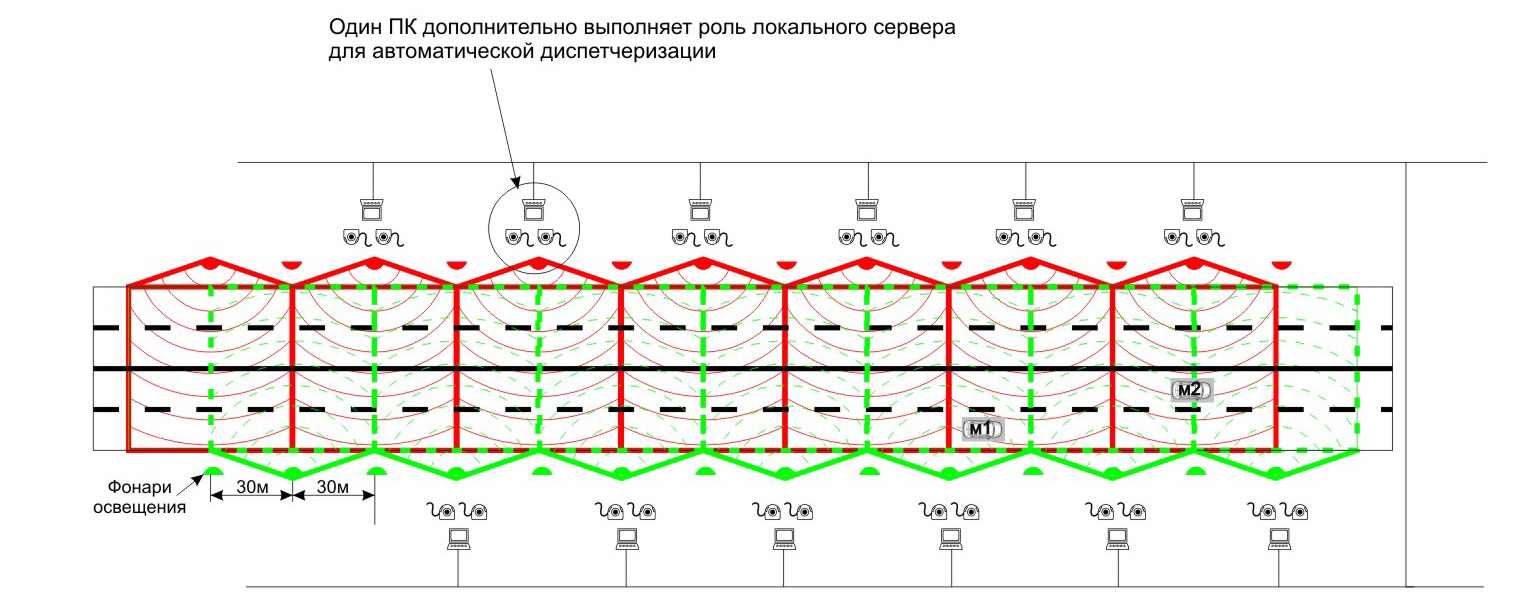
因此,需要根据蜂窝原理组织的用于所有道路的外部永久监视系统。 “ ITS SPRUT”由大视角的简单摄像机组成,从现有的灯杆从上到下指向。 因此,ITS SPRUT可以实时规划所有道路的俯视图,原则上不存在盲区,因为可以从四个摄像头对角线查看每个点(在战斗机级重复的可靠性)。 因此,信息不足的问题得到了彻底解决。
这种系统的价格是每公里1万美元。 也就是说,整个俄罗斯的一次性费用大约等于每年的CTP + CASCO付款,并且比每年因交通事故造成的官方损失少三倍。
其次,为了安全解决所有冲突情况,与航空中一样,仅在自动模式下才需要中央调度系统。 也就是说,在锥管上所有冲突的地方都变得交通管制。 为此,只需在每辆汽车上安装一个“独立交通信号灯”(IS),即可与ITS SPRUT保持双向通讯。 外部,在每辆汽车的前面,安装了一个LED灯条,作为行人的IP。 这样,所有道路使用者之间的互动问题已经得到了彻底解决。

IP的成本为三千卢布,低于儿童汽车安全座椅的平均成本。
因此,可以强制安装IP。 它是这样的。 信息实时显示在IP屏幕上:俯视图,有关导航的准确和当前信息,当前道路标志的作用,最大速度,绿波速度等。 为方便起见,根据交通信号灯原理,所有必要的控制信息均通过语音和LED磁带进行复制。 例如,执行绝对安全的转弯的步骤如下:包括左转弯信号,驾驶员将转弯请求发送到ITS SPRUT系统。 在检查安全性之后,在允许转弯的瞬间,左转弯LED灯条上的绿色信号点亮。 水平磁带确定相对于绿波速度的速度模式,闪烁频率确定偏差。 考虑超速驾驶:让驾驶员踩油门。 计算出速度和加速度后,“ ITS SPRUT”将包括第一个警告-红色闪烁,间隔较大,这意味着如果以相同的速度继续加速,则在几秒钟后将超过允许的速度。 如果驾驶员忽略了它,则闪烁频率会增加,并且第二个警告会通过免提电话发送出去。 如果他的驾驶员不予理it,那么我们已经记录了客观证据,证明驾驶员无法充分驾驶汽车。 « » .
, . « » ( ). , , , . , , , . , , . , , , « » .
« » ( ). , « » , , . .

, . . 3 . « » , . , , .
, « » . , , , .
, , , , . ( ).

, , , , . « » . , , . , , . « ».
« » . . .
« », 120 . . ( 12 ). « » .
. , « , ».
, , . . : 30 , . , , . , , , . , , , , . . , , . . , , , . ( ). , , , , . . , .
, ( ) , ( ).

« »
, « » , , , , . « » , ( ) :
- « », -. , .
- , (, , + , ). , .
, . . , . .
, « » , ( ), .
, 20% , , .
. , ( ) , . ( , , , ). « », -, , . , , , , 30 . : , , . « », , , . . , . , , , « » , .
« » , . .
, . , , , . , , , , . . , , .
. - , . « » , , , , . , « » . , , . , . ( , ) .
: « » 100% . , : « ». , , « » , . « » -, , , .

, . ekologurban.livejournal.com.
在这里,我们通过一些示例来考虑一般原则。
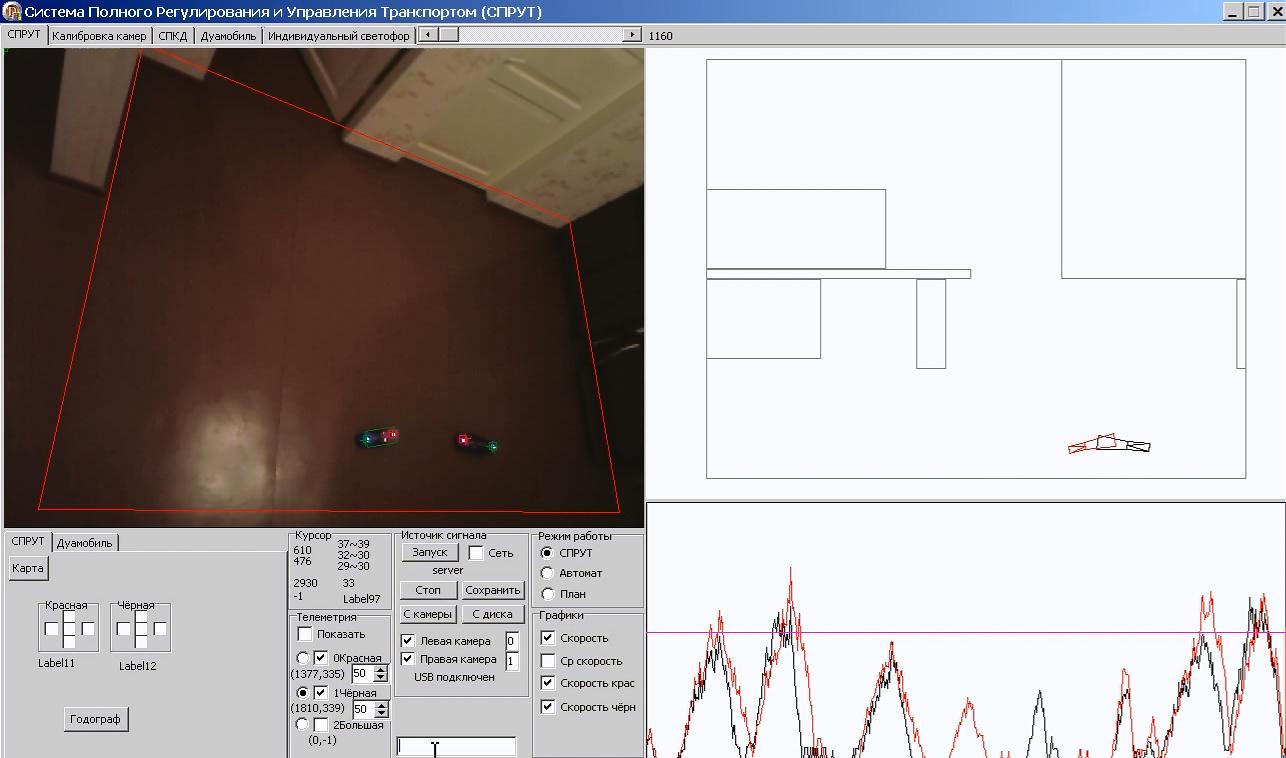
实时显示屏幕上的程序:左上方-ITS SPRUT系统摄像机的视频,右上方-一段路的俯视图,右下方-车速图,左-控件。 由于安全系统的主要目标是可靠性,因此我们将以最简单,最可靠和可理解的图形方式解决问题。 在平面视图上,我们绘制了道路的所有对象以及所有道路使用者及其安全区域(在紧急制动所需的时间下,在当前控件的作用下他们可以处于的路段)。 因此,如果车辆的安全区与任何障碍物相交,然后通过IS进行紧急制动,我们可以保证有时间制动而不会与障碍物碰撞。 在扩展版本中,还添加了一个警告区域,表示潜在的危险。 它的大小取决于驱动程序设置的反应时间。 同时,对象可以是真实的也可以是虚拟的,例如,红色交通信号灯,虚拟道路标记,虚拟人行横道,道路工程等。 无论如何,都不可能碰到它们。 因此,只要欧几里得几何形状正确,即使从理论上讲直到技术故障,交通事故都是不可能的。
让我们证明超速是不可能的:为此,在超速时阻止进一步的加速并允许降低它就足够了。 因此,即使在不断向地面“加气”的情况下,汽车也将变得抖动,但不会超过设定速度。 此外,速度限制取决于具体情况,并取决于特定的地点和时间(例如,仅在学校门口的下午); 以及个人,取决于驾驶员的资格,镶钉轮胎等。 因此,从安全的角度来看,“视觉零”道路基础设施的所有人为降级(减速带,“压制”交通的措施等等)都变得毫无意义!
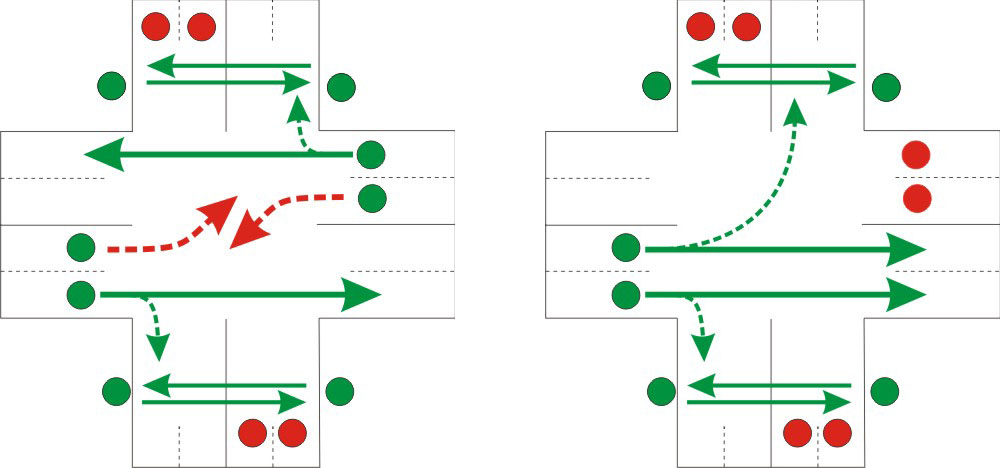
建模“不可能到达迎面而来的车道”的示例
实际上,进入迎面而来的车道并不是直接造成事故的原因。 原因是此操作的计算不正确以及其参与者的动作不协调。 考虑在每个方向的一条车道中的两条道路。

在正常状态下,两个频带均被不可逾越的虚拟屏障(实线)隔开。 让一辆黑色的汽车停在一条车道上,一辆红色的汽车从后面驶近。 首先,ITS SPRUT会不断监视距离的遵守情况,也就是说,危险的前车进近会远程激活制动器。 此外,不可能通过实线绕过黑色汽车,因此,在红色汽车的请求下,ITS SPRUT会临时创建一条单向交通的两车道道路的虚拟路段(在上图中)。 在超车完成之后,该路段将再次被清算,并且再也无法进入迎面而来的车道。 因此,退出进入迎面车道的潜在危险超车总是被前进物代替,而不进入迎面车道。
以相同的方式模拟所有其他交通事故原因。
因此,我们通过实验证明了道路交通事故死亡人数几乎降至零,这与车辆的技术故障相符。 但是,在使用ITS SPRUT系统的情况下,大多数技术故障也不会导致事故。 由于ITS SPRUT尽早发现了故障汽车,因此为其创建了一条自由通道,并向周围的汽车发送适当的命令。 因此,在大多数情况下,有故障的汽车不会与其他车辆相撞,并且可以安全停车,而不会造成严重损坏。 此外,将技术故障的后果视为事故根本是错误的,将其视为技术灾难更为正确。
结论
众所周知,任何问题都可以得到最有效的预防,而不处理其后果。 考虑到现有的交通混乱,原则上无法保证(现在方向盘在右边,而您正驶入公交车站,没有任何东西可以阻止它)。 此外,全世界每年有100万人甚至在意外事故中死亡35万人,而在所有事故中,直到最后一刻,所有参与者都竭尽全力避免这些事故,但是没有。 但是,正如上面的实验所证明的那样,ITS SPRUT系统的“防止傻瓜”概念可以确保安全,甚至避免故意事故。 此外,无需额外花费ITS SPRUT系统! 仅仅是通过CTP + CASCO收集的钱不应该像现在这样花在人和汽车的葬礼上,而是要避免发生任何事故。
PS:由于ITS SPRUT的所有功能均已通过实验证明,因此本着“不可能,因为永远不可能”的说法是有意义的。 因此,如果您的一些美丽且有益的“扁平地球”理论与现实不符,那么您就无事可做,您将不得不改变这些过时的理论。 请注意,尽管“每个人都知道不会100%发生,并且铁会淹死”,但由铁制成的船却漂浮得很漂亮,这被称为创新。 说到100%,我有意尝试简化专家的任务,因为要证明不是100%,仅举一个反例就足够了。 但是九年来,二十多次“考试”,没有一个这样的例子。
待续...