坐标下降法是多维优化的最简单方法之一,并且在找到具有相对平滑地形的函数的局部最小值方面做得很好,因此最好从中开始熟悉优化方法。
极值的搜索是在坐标轴的方向上进行的,即 在搜索过程中,仅更改一个坐标。 因此,多维问题简化为一维问题。
演算法
第一周期:
- , , ,..., 。
- 寻找极值功能 。 将函数的极点放在该点 。
- , , ,..., 。 极值功能 等于
- ...
- , , ,..., 。
作为执行n个步骤的结果,发现了一个极端的新方法 。 接下来,我们检查结束帐户的条件:如果满足条件,则找到解决方案,否则我们将执行一个以上的周期。
准备工作
检查软件包版本:
(v1.1) pkg> status Status `C:\Users\User\.julia\environments\v1.1\Project.toml` [336ed68f] CSV v0.4.3 [a93c6f00] DataFrames v0.17.1 [7073ff75] IJulia v1.16.0 [47be7bcc] ORCA v0.2.1 [58dd65bb] Plotly v0.2.0 [f0f68f2c] PlotlyJS v0.12.3 [91a5bcdd] Plots v0.23.0 [ce6b1742] RDatasets v0.6.1 [90137ffa] StaticArrays v0.10.2 [8bb1440f] DelimitedFiles [10745b16] Statistics
我们定义了一个用于绘制表面线或水平线的函数,通过该函数可以方便地调整图形的边界:
using Plots plotly()
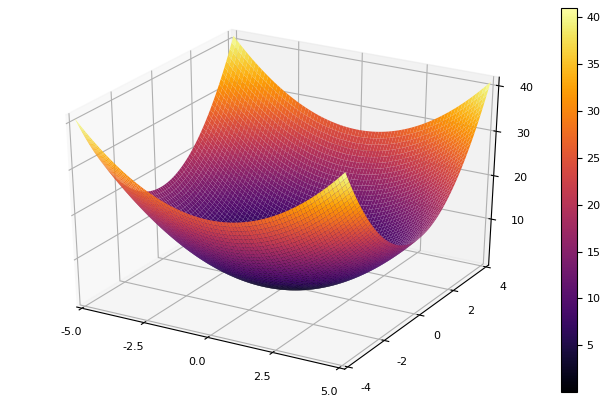
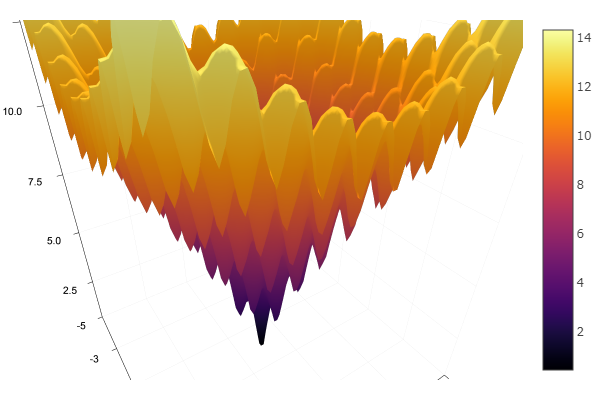
作为模型函数,我们选择椭圆抛物面
parabol(x) = sum(u->u*u, x) fun = parabol plotter(surface, low = [-1 -1], up = [1 1])
坐标下降
我们在一个函数中实现该方法,该函数采用一维优化方法的名称,问题的维数,期望的误差,初始近似值以及绘制水准线的限制。 所有参数均设置为默认值。
function ofDescent(odm; ndimes = 2, ε = 1e-4, fit = [.5 .5], low = [-1 -1], up = [1 1]) k = 1
接下来,我们将尝试各种一维优化方法。
牛顿法
该方法的想法很简单,实现也很简单

牛顿对初始近似值有很高的要求,并且在不限制步长的情况下,他可以轻松地驶向未知的距离。 计算导数是可取的,但是可以省去很小的变化。 我们修改功能:
function newton(i, fit, ϵ) k = 1 oldfit = Inf x = [] y = [] push!(x, fit[1]) push!(y, fit[2]) while ( abs(oldfit - fit[i]) > ϵ && k<50 ) fx = fun(fit) oldfit = fit[i] fit[i] += 0.01 dfx = fun(fit) fit[i] -= 0.01 tryfit = fx*0.01 / (dfx-fx)

反抛物线插值
一种不需要导数知识并具有良好收敛性的方法
function ipi(i, fit, ϵ)
如果我们使初始近似值更糟,则对于每个坐标下降时代,该方法将开始需要大量步骤。 在这方面,他的兄弟获胜
顺序抛物线插值
它还需要三个起点 ,但是在许多测试功能上,它显示出更令人满意的结果。
function spi(i, fit, ϵ)
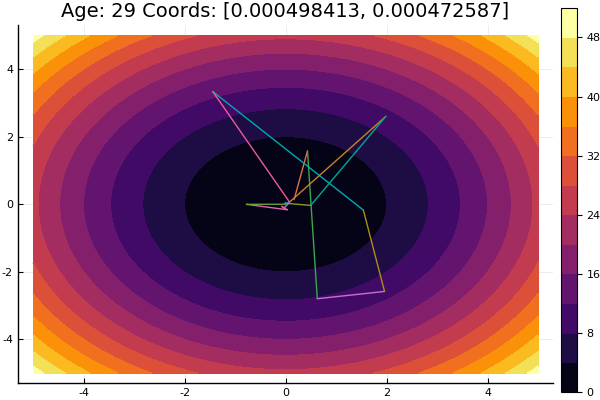
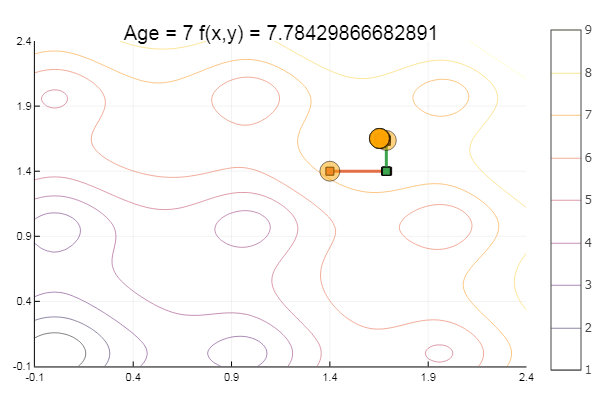
走出一个非常糟糕的起点需要三步! 很好...但是所有方法都有一个缺点-它们收敛到局部最小值。 现在让我们利用阿克莱的功能进行研究
ekly(x) = -20exp(-0.2sqrt(0.5(x[1]*x[1]+x[2]*x[2]))) - exp(0.5(cospi(2x[1])+cospi(2x[2]))) + 20 + ℯ

ofDescent(spi, fit = [1.4 1.4], low = [-.1 -.1], up = [2.4 2.4])
黄金分割法
理论 尽管实现起来很复杂,但该方法有时会通过跳过局部最小值来很好地展示自己
function interval(i, fit, st) d = 0. ab = zeros(2) fitc = copy(fit) ab[1] = fitc[i] Fa = fun(fitc) fitc[i] -= st Fdx = fun(fitc) fitc[i] += st if Fdx < Fa st = -st end fitc[i] += st ab[2] = fitc[i] Fb = fun(fitc) while Fb < Fa d = ab[1] ab[1] = ab[2] Fa = Fb fitc[i] += st ab[2] = fitc[i] Fb = fun(fitc)

坐标下降就可以了。 所提供方法的算法非常简单,因此以您喜欢的语言实现它们并不困难。 将来,您可以考虑使用Julia语言的内置工具,但是现在您想用手摸一摸,可以说,考虑更复杂,更高效的方法,然后可以进行全局优化,同时与另一种语言的实现进行比较。
文学作品
- Zaitsev V.V.物理学家的数值方法。 非线性方程式和优化:教程。 -萨马拉,2005年 -86岁
- Ivanov A.V.优化光学系统的计算机方法。 学习指南。 –SPb:SPbU ITMO,2010年-114s。
- Popova T. M.多维优化方法:针对“应用数学” / comp方向的学生,在“优化方法”学科中实验室工作的指南和任务。 T. M. Popova。 -哈巴罗夫斯克:太平洋出版社。 州 大学,2012.-44羽