道路安全问题,按分数排序
具有极其简单的控制(前进,后退,左,右)的汽车如何造成超过一百万人的年度死亡? 显然,这不是由于驾驶的复杂性,而是由于组织交通问题(速度限制,驾驶顺序等)。 我们设置任务以找到针对每个交通问题的完整解决方案。 在本文中,我们将考虑概念层面,即完全解决每个问题需要做什么。 以及如何实施它以及将花费多少,我们将在以后考虑。
1.信息不足的问题
做出任何管理决策所需的第一件事就是有关管理对象的最完整信息。 在这里,我们发现在一般情况下,驱动程序没有完整的信息,甚至在理论上也没有。 就是说,即使我们将所有现有的传感器放在汽车上,我们也仍然不会获得任何花钱做出管理决定所必需的完整信息。

您是否需要一台摄像机来显示建筑物拐角处是否有行人?
从车上看不到什至在最近的停放的车后面发生了什么,更不用说拐角处发生了什么。 此外,没有安装在汽车上的传感器(雷达,激光雷达等)在这里无济于事。 在某种程度上,有希望的车对车系统可以在此有所帮助,但它们将无法完全解决问题,因为在某些情况下,附近将根本没有其他车。 因此,我们需要外部(相对于汽车)恒定交通信息的来源。 即,对所有道路和路边区域进行全面和持续监控的基础架构。 不幸的是,即使是有希望的Car-to-I Car-to-X系统(汽车基础设施和汽车所有产品)也无法完全解决问题。 由于从原则上讲,它们并不完整,因此在特定阶段甚至会降低安全性。 例如,如果没有系统,则驾驶员在盲目转弯之前会减速,因为他不知道那里有什么。 而且,如果将CarToX系统安装在99%的汽车上,那么驾驶员会认为由于拐角处的信息尚未到达,因此有99%的可能性没有危险,因此没有必要放慢速度。 显然,转弯后可能有1%的卡车破损或倒下的树木。 但是由于这种可能性很小,因此许多驾驶员不会减速,因此,与缺少CarToX的其他信息相比,他们将以更高的速度开车进入卡车。

解决方案很明显,有必要从汽车上拆下观察传感器,并在整个道路上均匀地布置它们。
因此,为了完全解决汽车可见度有限和不足的问题,有必要建立一个外部基础设施,以对来自现有灯杆的所有道路进行全面连续监控。 很有可能,我们只是根据需要放置了尽可能多的相机,并根据需要放置了很多相机。
2.算命原则上不能解决信息不足的问题
由于运输是高速移动且具有很大的惯性,因此仅了解所有道路使用者的确切坐标是不够的。 我们需要有关其意图的准确信息。 现有的交通规则要求驾驶员预测运动中其他参与者的动作。 显然,如果您不是Baba Wang,那么准确的预测是不可能的。 再次,即使有希望的CarToX系统也不能完全解决问题,因为从原则上讲,它们不具有完整性和可靠性。 但是解决该问题的方法是众所周知的。 例如,在航空业中,这是中央调度。 也就是说,取代了“我想要的食物”的现有原则,引入了“与调度员达成一致”的允许性原则。 因此,调度员将获得有关所有驾驶员意图的所有准确信息。
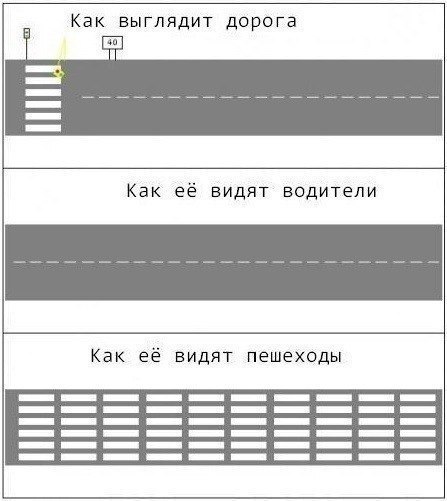
3.信息完整性及其普遍性问题

有时,驱动程序崩溃只会导致大量信息。 许多标志不仅需要被识别,而且还需要记住其作用范围。 如果在树枝后面看不到标志? 如果他被吹走了,还是无家可归者被拆走了? 此外,该信息对于每个人都应该是一般的。 也就是说,单向交通应该从两个方向正确显示,否则可能发生正面碰撞,每个人都认为自己是对的。 另一个问题是,几乎所有迹象都是永久性的。 但是,速度限制在很大程度上取决于特定的天气和道路状况,但是迹象并未反映出这一点。
好吧,主要问题是,为什么您需要所有这些标志? 需要它们以某种方式调节现有的混乱。 也就是说,这些拐杖根本无法解决混乱问题本身。 但这完全可以通过单个帮助系统(中央调度)来解决。
4.预测很多,但有一个计划
中央调度系统的缺点是扩展时计算量呈指数增长。 由于添加了N + 1个参与者,因此必须对其与现有N个参与者的交互进行预测。 因此,不仅人力调度员,而且高速计算机也将不能调度大量的汽车。 中央调度的另一个缺点是它的实时操作(任何情况现在都需要解决)。 显然,可能会偶然出现原则上没有安全解决方案的情况(手推车的任务不是关于自动驾驶汽车,而是关于现有的混沌运动,有时甚至从理论上讲也无法安全地征税)。 但是有一个完整的解决方案! 您只需要放弃预测,然后继续执行先前已知且已达成共识的路线图即可。 因此,我们得到了一个众所周知的道路计划,而不是对道路状况的许多概率预测。 而且,在计算上,这是在道路网络的图形上构造路线的简单且长期解决的问题。 它甚至比现有路线构造简单一个数量级,因为它不具有概率运行,但是具有完整的中央调度信息。 即使是家用计算机,或者说是具有关系层次结构的许多计算机,也可以应付此类任务。 因此,可以实时自动集中所有流量。 即,完全解决了信息不足的问题。
同时,集中调度和完整的永久视频监控解决了其他方面极为重要且实际上无法解决的信息可靠性问题。 如何确保您从CarToX系统中的其他汽车获得可靠的信息,而不是被黑客仿冒?
5.解决方案很多,因此冲突是不可避免的。 但是一个计划
有没有想过冲突和无礼来自何方? 从方差! 也就是说,当在SDA中存在严格未写入的竞争选项时,总是会发生冲突。
而且没有什么可做的,因为任何人只有两种选择:他的观点和错误的观点。 但是解决任何冲突情况的方法是众所周知的-它是一个独立的仲裁程序。 自动中央调度可以充当这样的仲裁器。 此外,为什么我们需要一名仲裁员? 我们不需要仲裁员! 毕竟,需要仲裁员解决新出现的冲突情况,但是我们确实有一个计划好的动作,由仲裁员自己计划。 也就是说,在计划阶段就足以制定计划,而不会发生潜在的冲突情况。 这样,原则上就不会存在冲突,也不会存在基于冲突的汽车粗鲁!
6.谁该怪谁,该怎么办
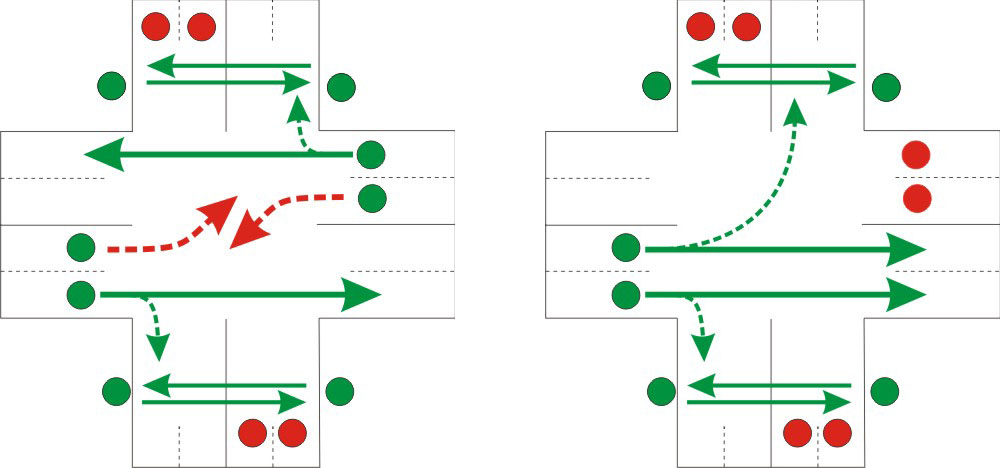
面对事故分析的每个人都知道,确定真正的罪魁祸首非常困难。 没有客观的信息或信息还不够,证人往往是自己感兴趣的人。 这里的问题是根本的,因为根据现有的交通规则,原则上在这种情况下,没有正确的,安全的轨迹概念。 就是说,如果两个驾驶员都严格违反交通规则,并且都开车驶过双重障碍物进入迎面而来的车道,但同时又没有碰撞而分散开,那么该事件甚至都不会进入公告。 如果一个驾驶员严格遵守交通规则并直接刹车,就会发生正面碰撞。 此外,在法庭上甚至可以判该驾驶员有罪,因为他没有遵守SDA的另一部分,并且没有尽一切可能避免碰撞。 交通规则充满了这样的矛盾。 结果,至少在某些事情上,几乎总是可以责备任何驾驶员。 请注意,创建这种冲突交通规则的交通警察将始终与之无关。 另一方面,很明显不可能描述所有潜在的危险情况。 但是有解决方案! 自动中央调度必须为每种运输规定正确的轨迹。 使用最可靠,最简单的图形建模可以非常简单地完成此操作。 也就是说,路线图上的任何两条路径都不应相交。 因此,第一个偏离他正确轨迹的人应该受到指责。 结果,责任问题始终得到客观和明确的解决。
7.互动问题

因此,排除了计划中的中央调度系统中的所有冲突情况。 剩下的就是添加一种设备,该设备可以与中央调度系统中的每个参与者以及通过它与所有其他道路用户进行交互。 为此,在每辆车中安装了一个用于汽车和行人的“个人交通信号灯”(IP),该信号灯与自动调度员保持恒定的双向通讯。 它由两个屏幕组成,一个屏幕在车内供驾驶员使用,另一个屏幕在车外供行人使用。 因此,绝对所有的交叉路口和转弯都将受到交通管制,并且所有限制条件都取决于上下文。 同时,从物理上讲,任何地方通常都不需要红绿灯和道路标志。 即,通过使用单个中介(自动中央调度),完全解决了所有道路用户的交互问题。
8.与行人的互动

如何计划行人的行动? 而且,他们不需要计划,足够安全地进行管理。 实际上,从安全的角度来看,当行人在人行道上时,他对道路安全系统不感兴趣。 也就是说,行人在哪里和如何沿着人行道行走都不会以任何方式影响安全性(行人彼此碰撞不会致命)。
因此,对于我们来说,足以保证在方便行人的地方行人通行的安全。 为此,在每辆车的前面安装了一个“行人专用信号灯”(IP),供行人使用(车外挡风玻璃顶部的红绿色LED灯带)。 由于该行人IC由通用的自动中央调度系统控制,因此可以保证行人的安全。 由于此交通信号灯随汽车一起移动,因此人行横道可以位于调度员将指示汽车停车以允许行人通过的任何地方。 也就是说,在任何方便行人穿越的地方,但任何时候都不会。
也就是说,非常不舒服的路外行人变得毫无意义!

中央调度完全调节行人的交通间隔和车辆(改进的自适应交通信号灯)。
与现有的行人交通信号灯有三个基本区别:
- 现有的行人交通信号灯的绿色不能保证安全(第三排的行人看不见的行人不能行人),绿色的IS可以保证安全,因为中央调度办公室可以看到一切并控制所有运输。 也就是说,仅当此部分中的所有汽车都停止时,行人IC上的绿色才会点亮。
- IS可以让行人在任何对他方便的地方安全地过马路,并且现有的行人交通信号灯(十字路口)迫使行人成为入侵者,因为进入汽车下方的可能性大大低于步行至最近的行人过道数百米的成本。
- 所有的行人交通信号灯都是“自适应的”,也就是说,完全没有人在那儿,但红色及时亮起的情况。
剩下的唯一共识是行人如何让中央调度员知道他将要过马路。 例如,您可以简单地在SDA中写入这样的请求:在灯光下行人停车,或者是过渡的标志。 同时,不需要为行人安装“呼叫”按钮。
因此,在这样的系统中,如果行人当然不是自杀者,那么他将永远不会进入IP的红灯,因为这是有保证的危险。
9.缺乏响应时间
由于我们有保证的安全计划和整个运输的确切坐标,因此我们只需在最早的可能阶段就减去两个向量(从计划的向量中减去实际的一个)即可确定甚至潜在的危险情况。 这尽可能解决了响应时间不足的问题。 例如,现在驾驶员看到迎面驶来的汽车稍微移到了中心线。 怎么办 但是没有什么,因为这种转变的原因是完全未知的:驾驶员可以绕着维修区然后返回自己的车道,或者驾驶员失去控制,这是进入迎面行驶的车道的初始阶段吗?

现在,正如他们所说,并非一切都那么简单!
问题在于,当明显要驶入驶入的车道时,可能没有足够的时间来做出反应。 但是,计划中存在保证的安全路径可以完全解决此问题。 在此示例中,由于计划中的计划没有绕行,因此确切地知道这是迎面驶来的车道的初始阶段。 因此,这是失去控制的初始阶段,我们必须开始应对。
10.以及如何安全离开
因此,存在危险情况,有条件地有两辆汽车迎面驶去。 怎么办 必须做出协调一致的决定(要么都在左边,要么都在右边)。 那么在左边还是右边呢? 显然,第二个将响应第一个的决定。 但是谁应该先转? 现在,原则上,对这些问题(不成文的规则和不成文的规则因为它们并不总是起作用)没有明确的答案。

左傻瓜弯路
中央调度系统再次向我们伸出援手,例如,向左发出明确的命令(这与书面和不书面规则相抵触),但不会导致事故。
11.那骑自行车的人呢?

自然地,绝对所有持续行驶的道路使用者,即除了行人以外的所有人,都必须连接并遵循中央调度员的指示。 作为保护程度最低的车辆,骑自行车的人对此最感兴趣。
12.没有罚款
由于计划和实际情况对于自动调度是已知的,因此即使在初始阶段,即使偏差最小也可以发出警告。 例如,如果您以相同的强度按压气体,那么几秒钟内您将超过速度。 如果这个最小的超限是偶然发生的,那么驾驶员将恢复并且不会有实际的超速驾驶。 因此,根本没有什么可与他相提并论的! 与所有其他违规行为类似,例如,驾驶员根本没有获得允许在禁止的地方停车的许可。 因此,唯一的冲突仍然存在-这是故意(在多次警告之后)忽略了调度程序命令。 显然,客观和有据可查的驾驶员证人证明,他故意违反交通规则不但应被剥夺驾驶执照,还应向授予他这些权利的人提起诉讼。
13.以及如何处理司机和恶意违规者?
为什么所有这些正确的警告(如果可以忽略的话)又因此将无法保证安全?

2秒22具尸体。
因此,为了确保安全(即严格执行计划),每辆汽车中的“个人交通信号灯”已连接到汽车的控件上,并且可以远程阻止驾驶员的任何潜在危险动作。 这样可以保证100%的道路安全性对技术故障准确无误。 为此,必须使用完整的信息和计划的移动功能来改进现有的串行紧急制动系统。 也就是说,它们将不会在像现在这样的某些简单情况下工作,而是在绝对所有危险情况下工作。
因此,故意违反交通规则仅一次。原则上,在没有许可证的情况下在完整的监视系统中驾驶是不可能的。14.责任
 从幼儿园开始,父母就教导孩子:“我在路上,您要对自己的安全负责。” 您不必看交通信号灯,而是看汽车,因为还没有一个交通信号灯杀死了行人。否则,您将是对的,但已死。而我却驾驶了高风险车辆,所以您应对一切负责。但是,驾驶员和行人是否要对其他道路使用者的行为负责,他们不能以任何方式对其施加影响?问题不是那么愚蠢。因为,如果对他们的行为负责,那么对他人负责,就没有逻辑!因此,交通组织的所有责任应分配给自动中央调度系统,该系统具有完整的信息,并且可以通过汽车和行人交通信号灯直接影响所有交通参与者的行为。也就是说,欧几里得及其几何负责计划的安全性,特定的程序员负责该几何的实际实施,驾驶员和行人仅负责明确遵守自动中央调度的要求,以符合交通计划。
从幼儿园开始,父母就教导孩子:“我在路上,您要对自己的安全负责。” 您不必看交通信号灯,而是看汽车,因为还没有一个交通信号灯杀死了行人。否则,您将是对的,但已死。而我却驾驶了高风险车辆,所以您应对一切负责。但是,驾驶员和行人是否要对其他道路使用者的行为负责,他们不能以任何方式对其施加影响?问题不是那么愚蠢。因为,如果对他们的行为负责,那么对他人负责,就没有逻辑!因此,交通组织的所有责任应分配给自动中央调度系统,该系统具有完整的信息,并且可以通过汽车和行人交通信号灯直接影响所有交通参与者的行为。也就是说,欧几里得及其几何负责计划的安全性,特定的程序员负责该几何的实际实施,驾驶员和行人仅负责明确遵守自动中央调度的要求,以符合交通计划。15.然后为什么要司机?
由于驾驶员本质上仅是表演者,并且计算机的性能比人好得多,因此,副产品本身就是第五级的自动驾驶汽车。同时,对于安全驾驶汽车的驾驶员来说,禁止驾驶乐趣没有意义。尽管将来经典的自动驾驶汽车方法意味着完全禁止“肉类”驾驶员。但是,在下一篇文章中,将会有更多的讨论。结果:在研究了道路上的所有主要问题之后,我们得出了可以完全解决所有问题的结论。文章标题中的搞笑图片原则上可以在实践中实现。这是该系列的第二篇文章。PS 链接 周期的第一篇文章概述了这种ITS SPRUT系统的工作原理,由于“ 零地球视觉” 的支持者已经挖掘了我的业力,因此我几乎没有机会与巨魔抗争,也没有回应评论的机会。但是,我阅读了所有评论,所有评论本质上都严格地针对文章的主题(我想提醒您,在本文中,我们仅在概念上讨论解决方案),我将在本文的更新中回答。我将立即回答为什么我参与了对“零视力”的批评。问题在于,虽然“零视觉”被认为是理想且无可争议的,但根本不考虑其他概念!怎么了
毕竟,我们拥有完善的“零视觉”解决方案,并将其注册在路线图中,仅此而已。因此,俄罗斯领先的创新组织国家技术计划组织(NTI)像这样写信给我:“该项目构想被认为是权宜之计,但不能在Autonet路线图的框架内实施,因为它不符合其任何方向,也无法提交给Avtonet工作组的考虑。” 待续...
待续...