多年来,英特尔一直珍惜并开发其RealSense技术,发布了
RealSense SDK的新版本和新的摄像头-
去年年底才真正推出了最新型号。 在有关
该公告的
文章中 ,我们简要回顾了该技术的历史及其原理,而没有强调第一,RealSense首先是深度图,它为周围的现实赋予了三维空间,并极大地扩展了其解释的可能性。 这是一个新的转折:以完全不同的方式工作的英特尔实感跟踪相机T265看到了光。
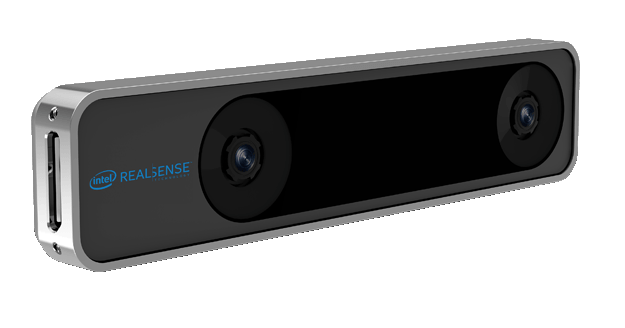
从硬件角度来看,英特尔实感跟踪相机T265是一款配备两个超广角鱼眼镜头(总视角-163度),一个6轴惯性IMU传感器(惯性测量单元)和一个专用VPU(可视化)的设备。处理单元)
英特尔Movidius Myriad 2作为中央计算器。
在此硬件基础上,实现了一组称为Intel V-SLAM(视觉惯性里程计同时定位和映射,基于视觉惯性里程计的同时定位和映射)的算法。 它的本质是仅使用来自摄像机的图像和来自惯性传感器的数据并同时绘制周围环境,从而将其定位在地面上。 所有算法均在VPU上本地执行,从而提高了准确性,最大程度地减少了接收数据的延迟,并实现了高能效。 从数量上讲,这些成就如下:闭环通过期间的定位误差小于1%,运动与其显示之间的延迟不超过6毫秒。 即使对于要求苛刻的AR / VR应用程序,此类指标也足够了。 至于功耗,它在负载下仅为1.5瓦。

T265以工作原理而著称,是Intel RealSense的一部分,可以与该系列的其他摄像机配合使用,为清晰起见,这些摄像机现在称为Intel RealSense深度摄像机。 在T265镜头的前面安装了一个红外滤光片,以切断D400摄像机的红外辐射,它们用来形成深度图。 因此,开发人员有机会在一个设备中利用两种类型的相机。
尺寸英特尔实感跟踪摄像头T265-108 x 24.5 x 12.5毫米,重量-仅55克。为了易于连接到移动平台,提供了两个M3螺钉的插槽。 该相机
可预购 ,价格为199美元。