汽车工业目前正在自动驾驶领域发生一场革命。 无人驾驶车辆可以为乘客提供更高的安全性,因为其管理没有人为因素。 未来无人驾驶汽车的广泛使用将减少事故的发生,并节省人们日常驾驶的时间。
OSCAR(开源CAR)是开源StarLine无人驾驶汽车的一项研究项目,结合了俄罗斯最好的工程技术思想。 之所以称为OSCAR平台,是因为我们希望使有关汽车的每一行代码都向社区开放。

平台解剖
作为车辆的使用者,车主希望安全,舒适,准时地从A点到达B点。 用户故事是多种多样的,从旅行到上班或购物到结束与朋友或家人一起闲逛,而无需始终关注路途。
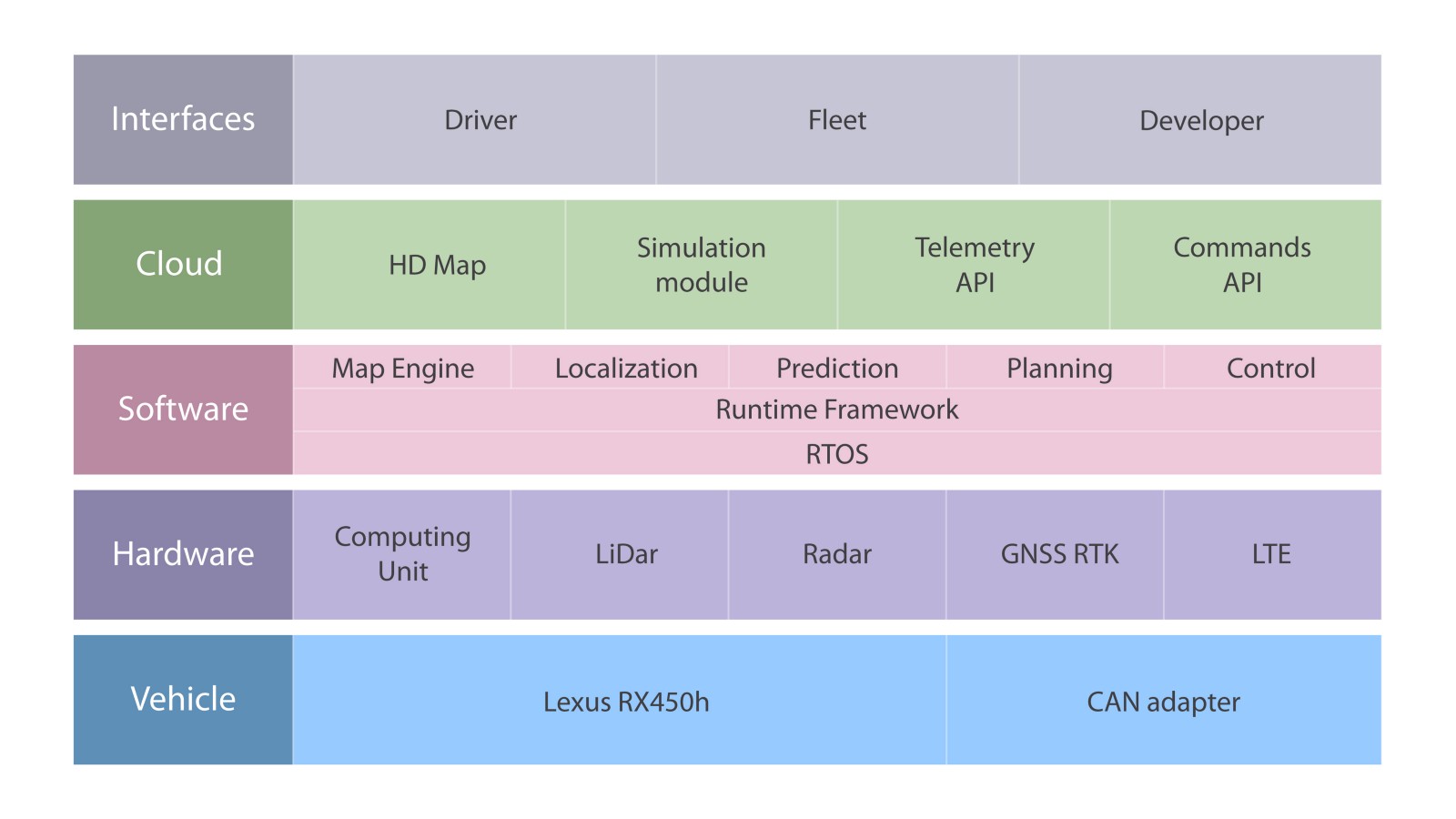
因此,平台的最高级别是用户应用程序和环境。 我们依靠三类用户:个人用户,商业用户和平台开发人员。 对于今天的每个小组,我们都在设计一个单独的界面。 第二层是服务器部分,其中包括高分辨率地图,模拟模块以及为汽车提供服务的API。 软件级别是创建将内置到汽车中的程序。 平台的下两个层次是在汽车本身上工作的,这涉及检查机器本身的数字接口并安装设备。
车子
一辆现代汽车最多可以有70个用于各个子系统的电子控制单元。 通常,功能最强大的处理器是引擎控制单元,而其他则用于控制变速箱,安全气囊,防抱死制动系统,音频系统,后视镜调节...其中一些形成独立的子系统,而其他一些则在它们之间交换信息和命令。
为了确保车辆设备之间的通信,开发了CAN标准。
CAN总线是工业网络标准,也是数字通信系统和汽车电气设备的控制。 汽车设备并行连接到CAN总线以发送和接收数据。 可以使用此数字接口,例如,您可以使用控制命令打开引擎,打开车门,折叠后视镜。
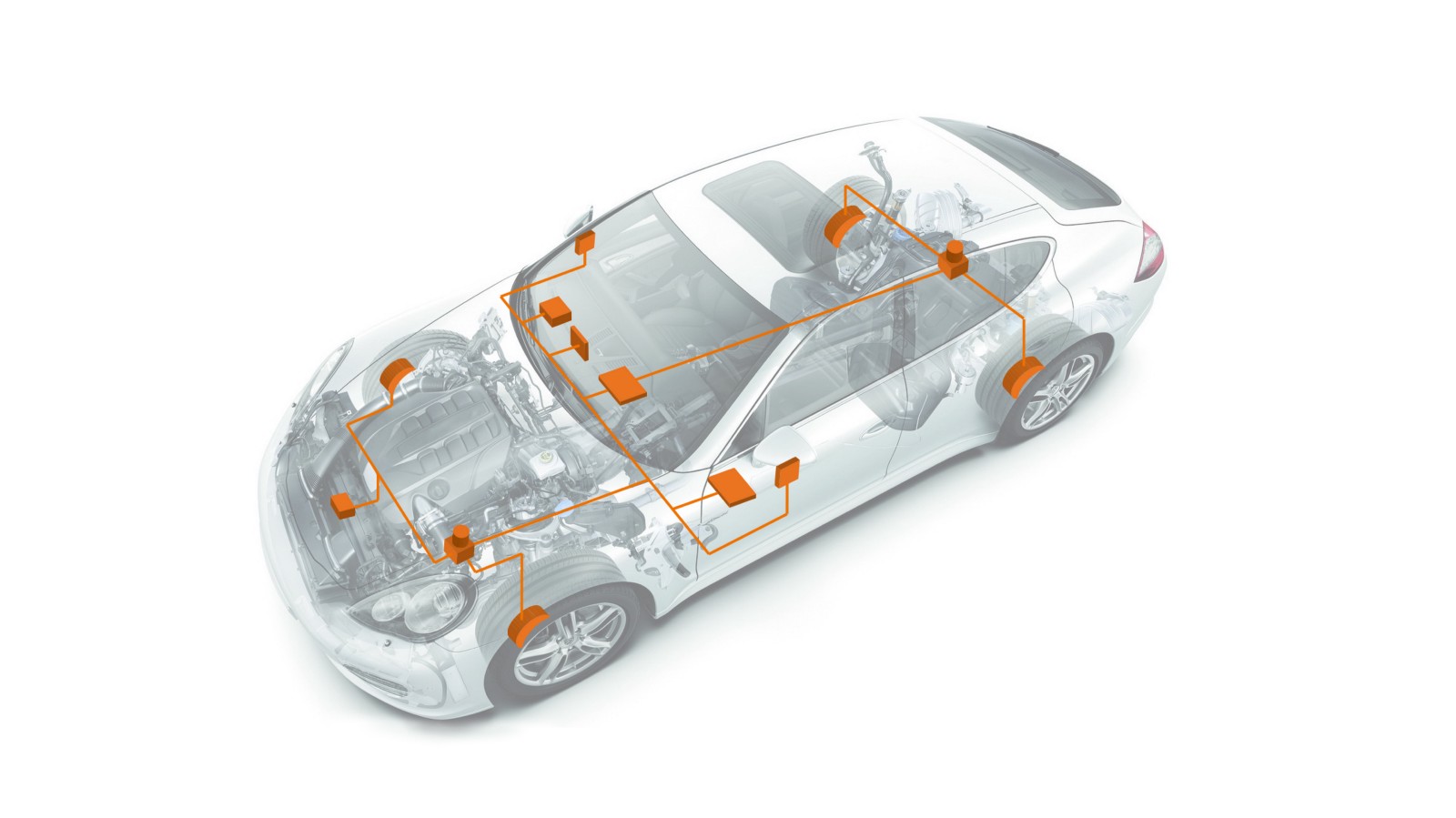
为了控制汽车的加速和转向,我们需要访问CAN总线并了解相应的数据包类型。 NPO StarLine是电子设备的制造商,因此我们开发了自己的CAN总线适配器。

目前,我们可以使用笔记本电脑来操纵,刹车和加速。

配套设备
一个重要的工作领域是为车辆配备传感器和传感器。 有许多方法来装备无人驾驶车辆。 例如,一些公司使用昂贵的激光雷达,而另一些公司则拒绝使用它们,从而使自己只能使用其他设备的读数。

现在,无人驾驶的StarLine汽车配备了多个单目和双目摄像机,雷达,激光雷达以及卫星导航。
GPS接收器的任务是确定其在空间中的位置以及确切的时间。 民用GPS接收器的精度不足以定位无人驾驶的车辆;误差可能高达几米。 发生这种情况的原因既有城市环境中建筑物墙壁发出的信号的反射,也有由于自然因素预测不佳,例如地球电离层中卫星信号速度的变化。
对于无人驾驶汽车的定位,民用GPS接收器的误差太大,因此,在我们的开发中,我们使用超高精度卫星导航。 为此,在汽车上安装了GNSS RTK接收器,该接收器使用了更先进的定位技术,因此仅通过卫星导航即可达到厘米的定位精度。
但是在开车时,汽车可能会停在隧道或桥梁下,那里的卫星信号太弱或根本没有信号。 因此,GNSS-RTK接收器的精度会下降,或者完全不可能进行定位。 在这种情况下,汽车将使用里程表和加速度计的读数来完善其位置。 合并来自多个不同来源的数据以减少不确定性的算法称为传感器融合算法。
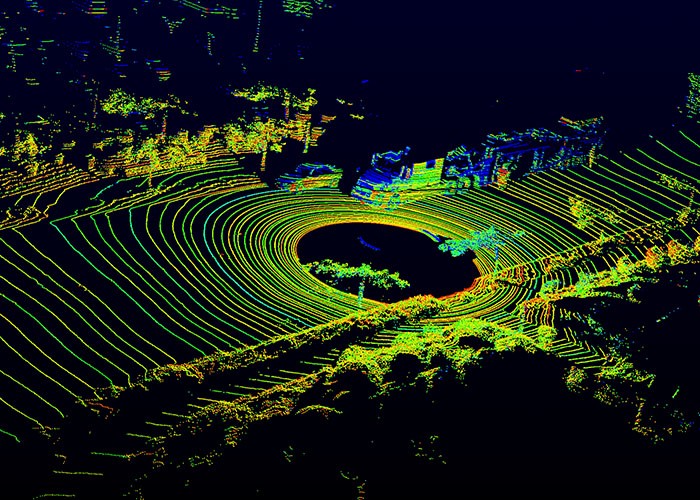
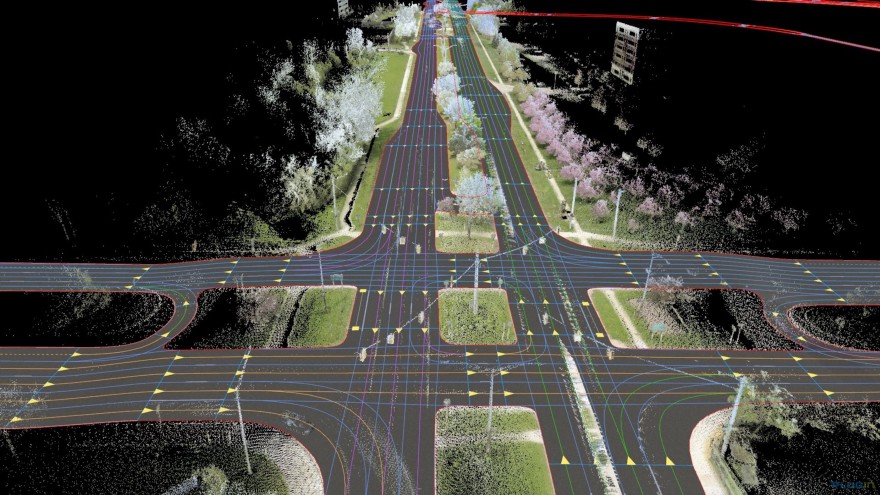
除了对无人驾驶汽车进行定位的任务外,还必须了解地图上没有的动态障碍物,例如,附近行驶的汽车或过马路的人。 为此,无人驾驶车辆使用雷达和激光雷达数据。 雷达使用无线电波检测障碍物,并且由于多普勒效应,还可以让您计算其径向速度。 激光雷达是一种主动式光学测距仪,它不断扫描周围的空间并形成其三维地图,即所谓的点云。
必须先配置无人驾驶车辆中使用的每个设备(从摄像机到RTK GNSS单元),然后才能进行安装。
软体类
在最大规模上,无人机软件包含多个模块,包括:识别,计划,本地化和控制。
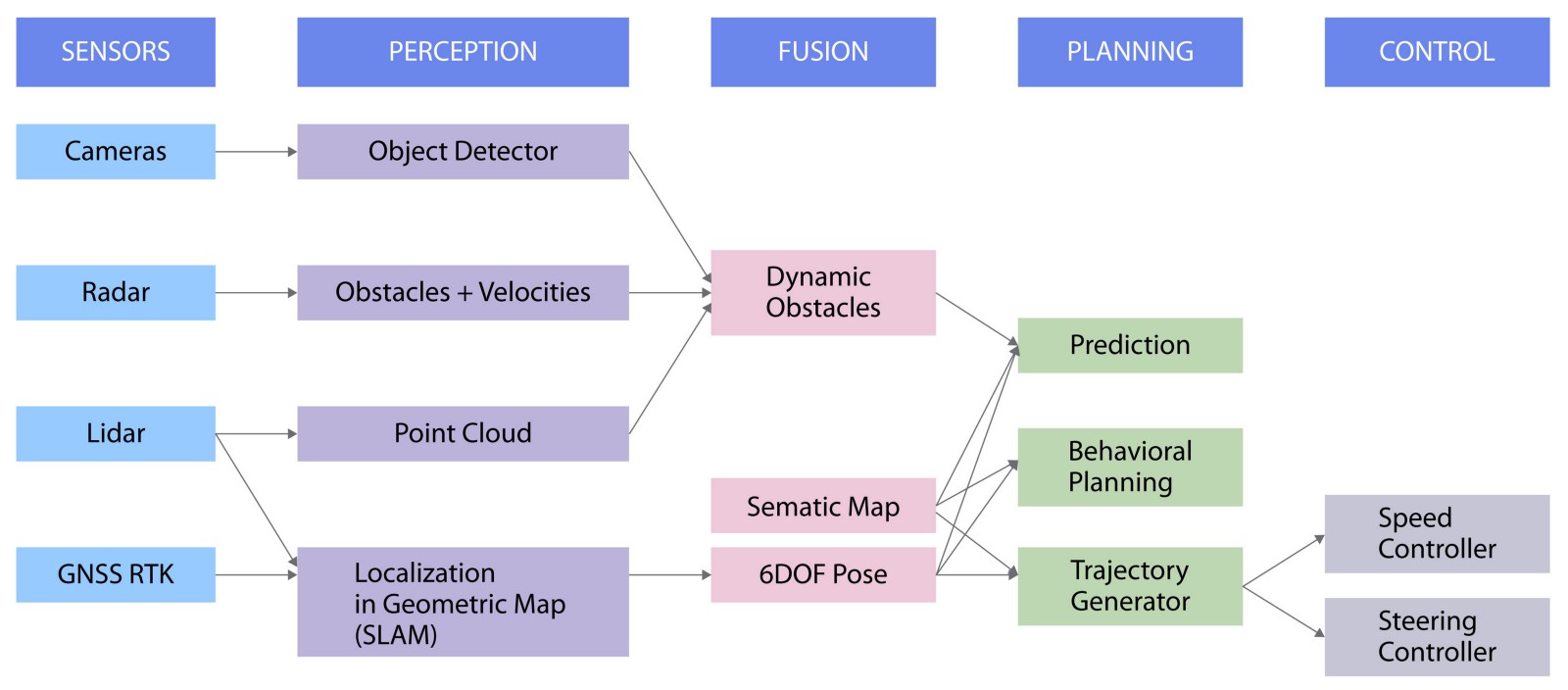
来自摄像头的数据用于识别和检测物体,雷达接收周围物体的坐标和速度,激光雷达为算法提供点云,GNSS RTK模块使用卫星数据定位汽车。
然后,将前三个来源的数据组合起来,以获得有关汽车附近障碍物的信息。
同时,使用卫星和激光雷达读数来解决SLAM问题,这意味着同时定位和绘制地形图。 这是一种通过跟踪对象在其中的位置来创建未知环境的地图的方法。 该信息用于计算汽车的6个坐标,其中包括3个空间坐标和3维速度。
下一步是规划车辆的局部轨迹。 最后一步是控制模块,该模块用于实际执行在轨道构建过程中构建的轨迹。
目前,我们从事设置和安装设备的工作,还致力于汽车控制模块的开发。
云
服务器部分包括四个块:
首先,我们需要用于存储地图的位置以正确定位汽车,以及用于数据分析的遥测服务。 这是我们早期的服务器体系结构图,其中包括两个模块。 稍后,我们将使用命令API对其进行扩展,以便能够从服务器向汽车发送控制命令。 我们还将添加一个仿真模块。
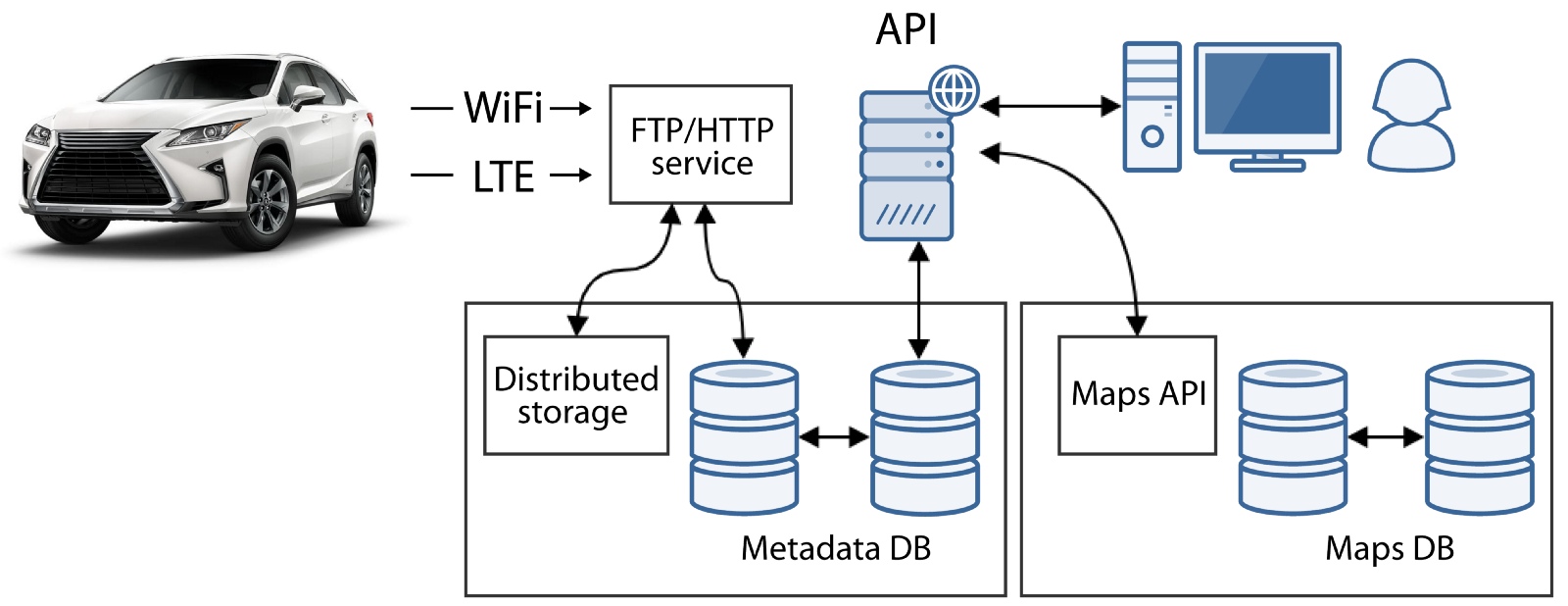
HD地图是提供精确到厘米的真实世界的完整图片的地图,包括与道路基础设施相关的所有信息,例如,有关车道,标志和交通灯位置的信息。 该地图可能还包含激光雷达数据,以使无人机可以在其上定位。
需要模拟器来生成流量情况以进行调试和测试。 通过模拟交通情况,我们可以通过在任意英里的可自定义场景和罕见条件下进行单元测试来提高算法的鲁棒性,而所需的时间和成本只有在真实道路上测试的一小部分。

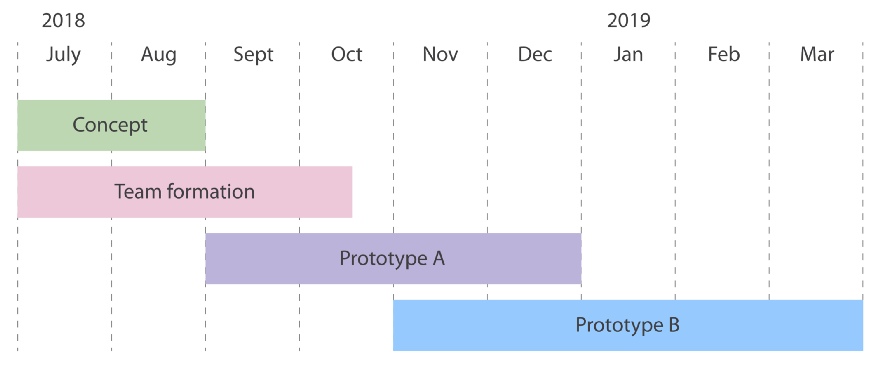
路线图
7月,我们首先提出了一个概念,创建了一个团队,并开始了原型A的开发。原型A是可以沿航路点行驶,但需要操作员干预以避免障碍的汽车。 我们计划在2019年春季完成原型B的开发,这款汽车可在无需驾驶员控制的情况下绕过障碍物。
那么,无人机的内心有什么?
该车基于先进的算法,数据流,高性能接口和复杂的设备。 此外,汽车不仅需要硬件和软件,还需要服务器和客户端应用程序。 这种技术的心是开放的,我们不仅依靠StarLine团队的主动性,还依靠开源社区的帮助。
StarLine无人驾驶汽车的主要目标是希望使人们的生活更舒适,更安全。 技术对我们很重要,但是我们相信技术和科学知识能够为人民服务,这是我们努力的真正核心。 我们正接近使用设备提供道路安全的一天,人们将有机会将更多的时间投入到对他们而言重要的事情上。 如果您同意我们的观点,那么我们很高兴邀请您加入我们,共同创造明天的技术。
Gitlab项目