这个故事是关于我如何构建移动机器人平台以及我的“ NanoBot-a”的命运的。
一切始于2008年,那时我还很年轻,很天真,很愚蠢,所以我从事机器人技术以及各种机电一体化领域的研究。 建造大型手推车的想法在更早的时候就浮现在我的头上了,现在,在长期酝酿了制造计划之后,我开始创造这种儿童思想的奇迹。
我诞生了这样一个原型:

由方形截面25x25mm的异型管制成框架。 其整体尺寸为500x500x300毫米。 好吧,是的,那我就进行了大规模的思考。UAZ汽车雨刮器的两个齿轮马达,一辆小型儿童自行车的驱动轮,必须移动这东西,前面是两个风向标。 这个巨人建在公寓里。
考虑到行为算法的计划是“ Napoleonic”,因此必须在机器人上配备一台成熟的计算机,没有用于mini-ITX的钱,我在ATX妈妈身上找到了一台普通的PC。 所有这些都被泵入内部,并向堆中再放了两个氦电池,并用三毫米的组织包裹了所有东西。 玻璃,总体来说,这种装置看上去很漂亮,但又很大又笨重。 由于电子设备出现了困难,我未能成功启动它,有时我不时放弃该项目,然后又开始工作...

最后,我意识到这种设计非常繁琐,并且由于主要思想仍在我脑海中,因此决定从头再来...
差不多一年后,我开始设计。 然后我只是对CAD感兴趣,并试图自己研究它们,结果我首先在AutoCAD中制作了图纸,后来又将它们转换为3D(当我开始学习COMPASS 3D时)。 我将布置图纸和模型以供免费使用,谁知道谁会派上用场或会变得有趣。
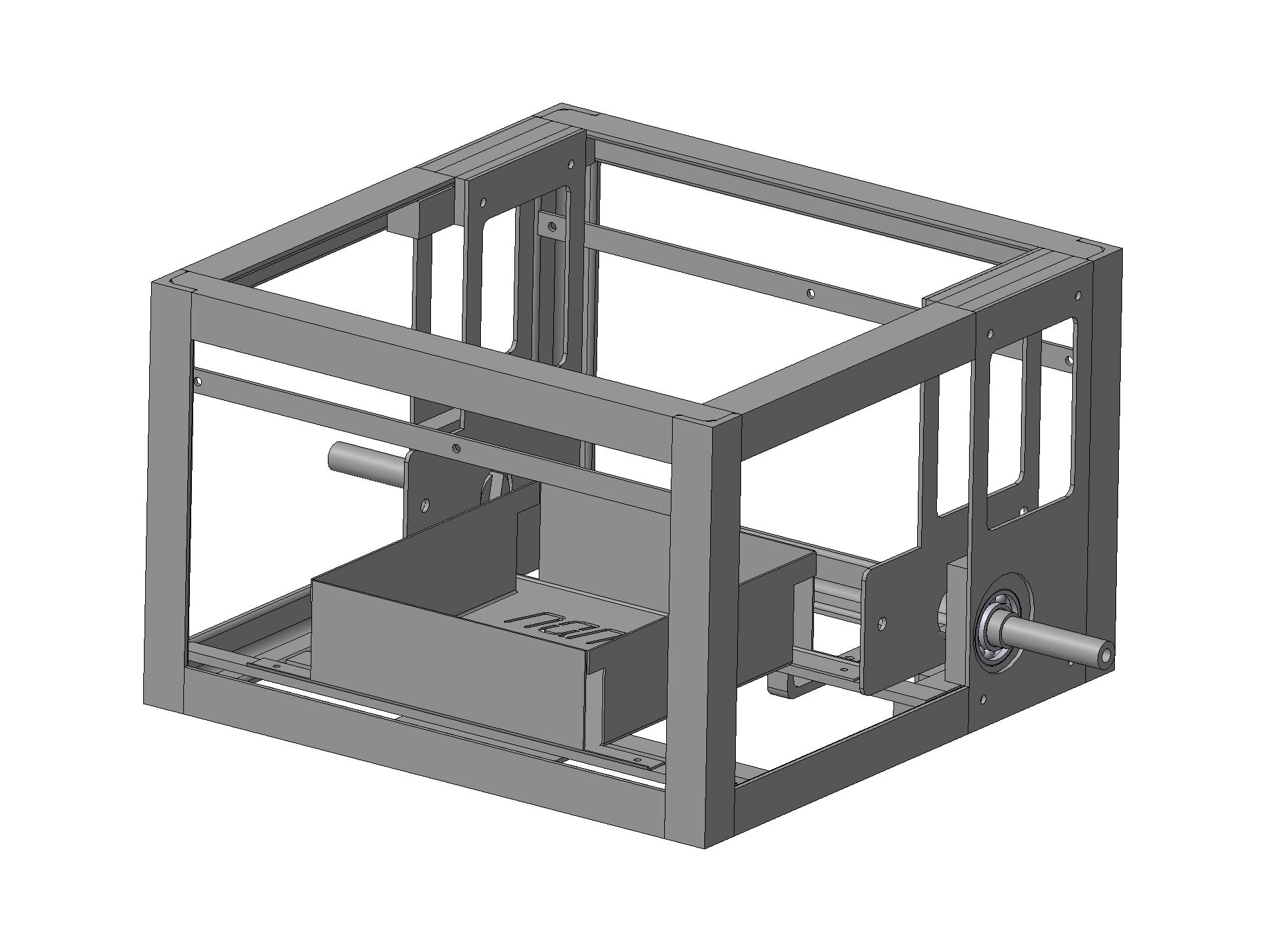
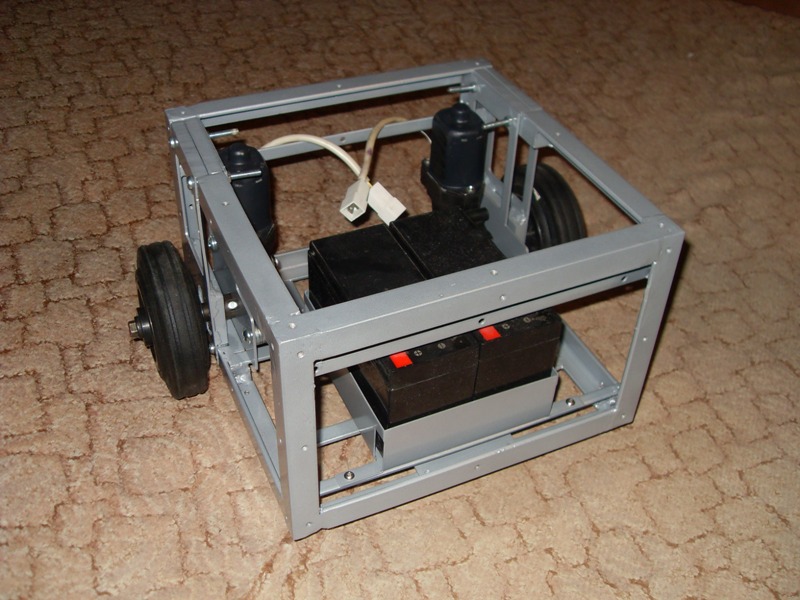
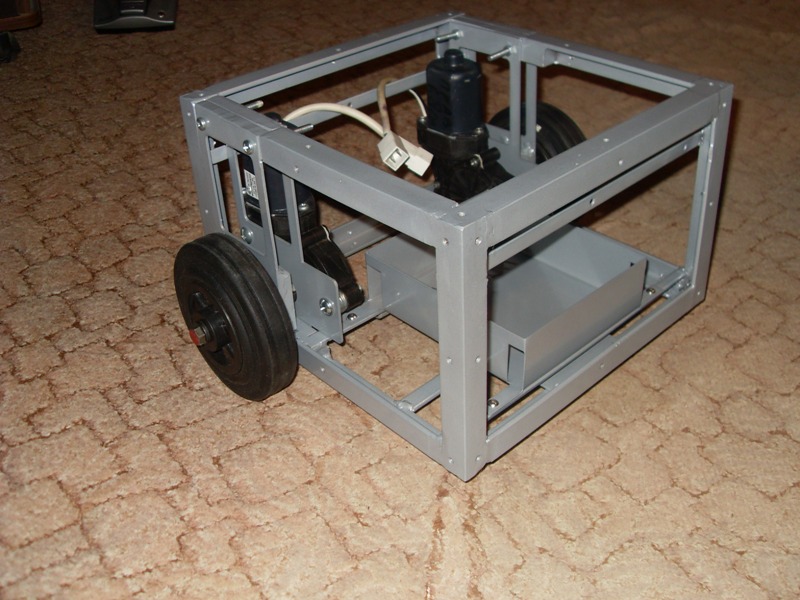
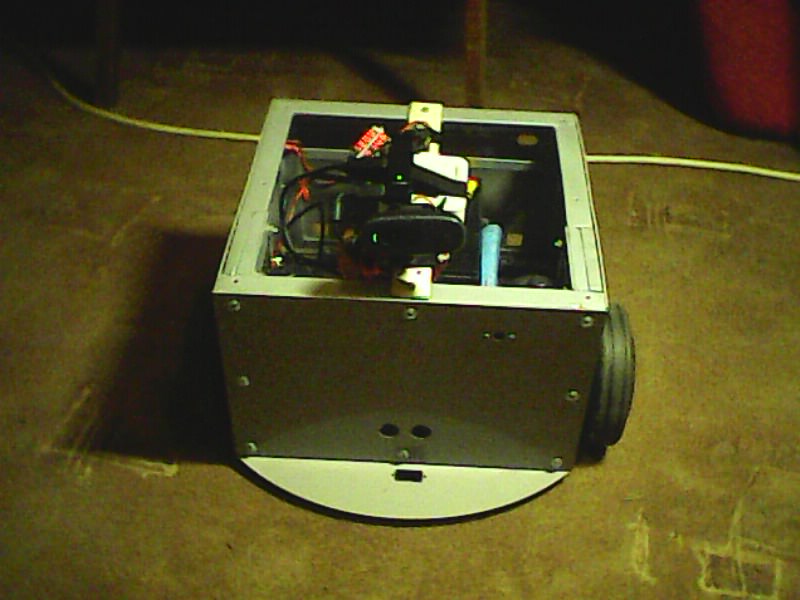
我将图纸交给了一家熟悉的工厂,在那里为我制作了几瓶伏特加酒的架子(俄罗斯-价格昂贵)。 在尺寸上,它已经比以前的300x300x200小,并且是在第二十个角制成的。 另外,用CNC激光切割了用于发动机固定的板和用于放置两个12伏电池的容器。

由于所有这些操作都已经进行了很长时间,因此框架生锈了,后来我将其用于粉末喷涂。 直径125毫米的车轮通过安装在球轴承中的附加半轴直接连接到发动机。 前面装有一个小叶片轮。 我决定用铁包住框架,然后似乎比从org切割出来的技术更多。 玻璃,因为我知道他们在CNC电脑上切割钢材的办公室,然后可以将其涂成任何颜色...


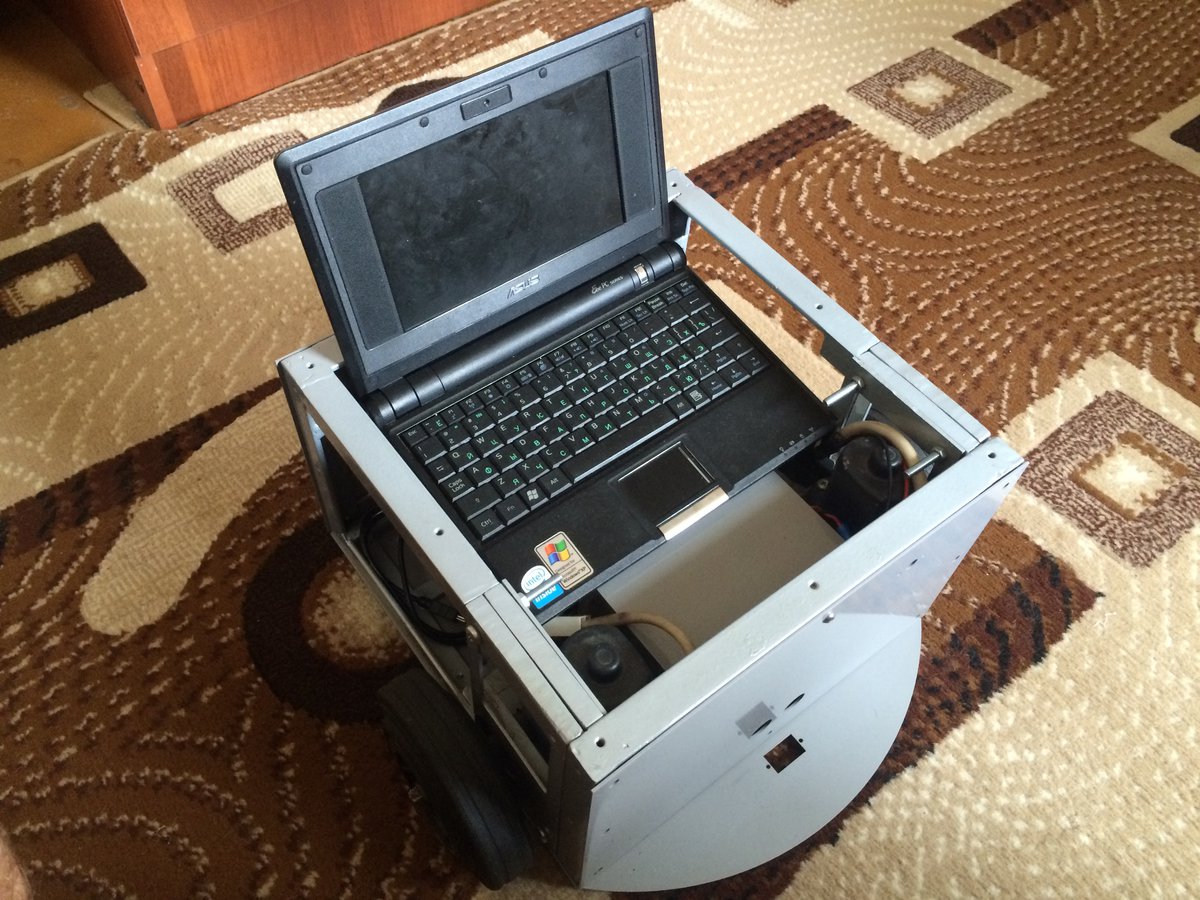
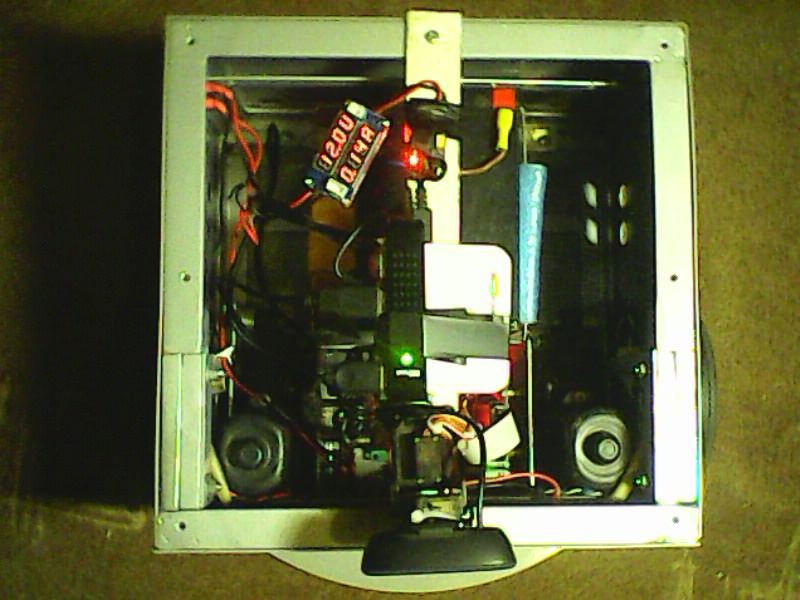
有了框架,一切似乎都清晰了,让我们继续进行电子学。 计划从PC远程控制机器人,并且在机器人上还计划从小型计算机放置东西。 到那时,我已经设法从亲戚那里剪下一台旧的ASUS上网本,它的大小完全适合电池上方机器人的顶部。 但是要控制机器人,一个上网本是不够的,为此,有必要从“ Open Robotics”购买另外三块板,“ Open Robotics”是基于AVR微控制器的板,用于控制和收集数据,OR-AVR-M128-DS,用于与OR-USB-UART上网本通信的板,以及电源板驱动程序OR-MD2-10A-12V-X,现在我当然可以在arduino上完成所有工作,但是当时它并不那么受欢迎,而且这些模块是专门为机器人推车设计的。 计划将多个测距仪传感器,两个编码器连接至控制板,并计划控制多个伺服器以更改测距仪的扫描角度。 我想做一个基于激光指示器和摄像机的测距仪。 但从来没有想到,一切都仅限于连接电子设备和编写简单的管理程序。 使用TeamViewer程序进行远程管理。 在我的程序中,有一个简单的端口连接,一个数据传输接收窗口,一个速度输入线(PWM百分比)和几个方向按钮。
结果,由于对电子产品的误解,该项目没有得到应有的重视,因此很少处理。 随着时间的流逝,我意识到将开发项目扔掉或放入车库是很可惜的。 我决定以象征性的价格出售。 我认为可能有些人对此也很感兴趣,他们对电子学和编程有更好的了解,也许有人正在制定某种行为/运动算法,或者有人只需要在展厅或商店里放一个广告平台(当然,他可能会摔断双腿) )
我将它连同电子产品,电池,上网本,测距仪和伺服器(在MG996r伺服器的上下圆形盖上有两个孔的矩形切口),一个16x2显示器和一对LED阵列(它们下面的前面板上的方形切口)一起出售了。

据我了解,购买我的机器人平台的人给了她第二次生命,我很高兴这块铁能够活下来。 那是在2016年,旅程从光荣的伊凡诺沃市开始,到英雄的图拉市。
但是,就在最近,第三位所有者与我联系,并说他现在有一个平台(加里宁格勒地区)。 显然,第一个购买者出了点问题……与我联系的人并没有让我失望,但平台被移交给了他,但没有任何相关组件,但其他一切似乎都完好无损,因为机器人的皮肤是金属制的1.5毫米的厚度,是时候让他参加机器人战斗了...
机器人进行了一些升级,这是新所有者写的:
“平台来了。 通过一些操作,提供了10 Ah 12V电池,带有自定义OpenRobotisc固件的TL-MR3020路由器,带伺服器的支架上的Logitech C270网络摄像头,用于4个端口的微型集线器以及为路由器供电的DC-DC转换器。 然后,用熨平板,电工胶带和其他简易手段将所有这些螺栓固定。 “他活了!(C)Robocip”一只重达18公斤的地狱般的铁傻子像烫伤一样在小房间里奔腾,最坏的时候能够摔倒腿和摔断腿……我们需要将车轮更换为普通车轮,更换支撑轮,正常固定电子设备并耕种电线。 经过所有的调整和改进后,这个神奇的盒子将能够在院子里开车,吓到猫和wino邻居。 而且,如果您将中国操纵器放在6台服务器上,那么您就可以远程抓爪。”
这是来自最新消息:
这是关于我的孩子的一个故事,我希望新主人不会放弃机器人,而他会活很长一段时间(既是主人又是机器人)。 否则,平台的命运将被埋在苹果树下,以铁浸透土壤。 当然,这对苹果树是绝对的好处,但并不是所创建的机器人的直接目的。
至于名称“ NanoBot”,那么一切都非常简单。 可能很多人记得大量广告(在僵尸盒子上),其中有一个非常流行的前缀“ nano”,我决定将此前缀添加到机器人的名称中,特别是因为它充分描述了其物理参数。