哈Ha! 我提请您注意
卢卡斯·巴斯克斯 (
Lucas Vazquez)的文章
“理解Q学习,悬崖行走问题”的译文。
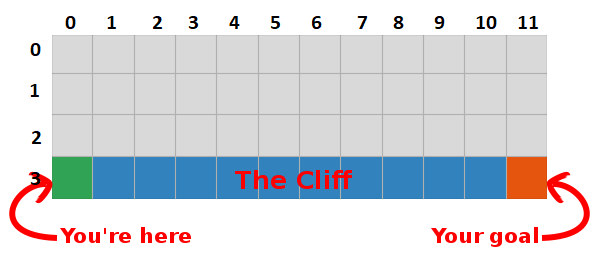
在上一篇文章中,我们提出了“在岩石上行走”的问题,并解决了一个没有意义的可怕算法。 这次,我们将揭示此灰色框的秘密,并看到它并不那么可怕。
总结
我们得出的结论是,通过最大化未来奖励的数量,我们还找到了实现目标的最快途径,所以我们现在的目标是找到一种实现此目标的方法!
Q学习简介
- 让我们从建立一个表开始,该表衡量某个动作在任何状态下的执行情况(我们可以用简单的标量值来衡量它,因此值越大,动作越好)
- 该表的每种状态都有一行,而每个动作都有一行。 在我们的世界中,网格具有48个状态(4个Y乘以X 12个X乘),并且允许进行4个操作(上,下,左,右),因此表格将为48 x 4。
- 该表中存储的值称为“ Q值”。
- 这些是对未来奖励金额的估计。 换句话说,他们估计在游戏结束之前,处于状态S和执行动作A之前,我们可以获得多少奖励。
- 我们使用随机值(或某个常数,例如全零)初始化表。
最佳的“ Q表”具有允许我们在每种状态下采取最佳行动的值,从而为我们提供了最终获胜的最佳方法。 问题解决了,干杯,机器人勋爵:)。
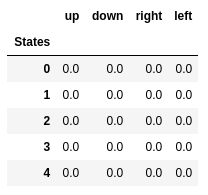 前五个状态的Q值。
前五个状态的Q值。Q学习
- Q学习是一种“学习”这些值的算法。
- 在每一步中,我们都会获得有关世界的更多信息。
- 此信息用于更新表中的值。
例如,假设我们离目标(平方[2,11])仅一步之遥,如果我们决定下降,我们将获得0而不是-1的奖励。
我们可以使用此信息来更新表中的状态-动作对的值,下次访问它时,我们已经知道向下移动会给我们0的奖励。
现在,我们可以进一步传播此信息! 由于我们现在知道从平方[2,11]到目标的路径,任何将我们引向平方[2,11]的动作也将是好的,因此我们更新平方的Q值,从而将我们引向[2,11]接近0。
女士们,先生们,这就是Q学习的精髓!
请注意,每次达到目标时,我们都会将实现目标的“图”增加一个平方,因此,经过足够的迭代,我们将获得完整的图,该图将向我们展示如何从每个状态达到目标。
 通过在每种状态下采取最佳措施来生成路径。 绿色键代表更好操作的含义,更多饱和键代表更高的值。 文本代表每个动作的值(上,下,右,左)。
通过在每种状态下采取最佳措施来生成路径。 绿色键代表更好操作的含义,更多饱和键代表更高的值。 文本代表每个动作的值(上,下,右,左)。贝尔曼方程
在讨论代码之前,让我们谈一下数学:Q学习的基本概念,即Bellman方程。

- 首先让我们忘记这个方程中的γ
- 该方程式指出,特定状态-动作对的Q值应该是转换到新状态(通过执行此动作)时收到的奖励,并添加到下一个状态的最佳动作的值中。
换句话说,我们一次只散布有关动作值的信息!
但是我们可以决定,现在获得奖励比将来获得奖励更有价值,因此,我们有一个γ,即0到1(通常是0.9到0.99)的数字与将来的奖励相乘,打折未来的奖励。
因此,给定γ= 0.9并将其应用于世界的某些状态(网格),我们有:

我们可以将这些值与GIF中的上述值进行比较,然后看得出它们是相同的。
实作
既然我们对Q学习的工作方式有了直观的了解,我们就可以开始考虑实现所有这些,并且我们将使用Sutton本书中的Q学习伪代码作为指南。
 萨顿书中的伪代码。
萨顿书中的伪代码。代码:
- 首先,我们说:“对于所有状态和动作,我们都可以任意初始化Q(s,a)”,这意味着我们可以使用自己喜欢的任何值创建Q值表,它们可以是随机的,也可以成为任何永久性都没有关系。 我们看到在第2行中,我们创建了一个充满零的表。
我们还说:“最终状态的Q值为零”,我们不能在最终状态中采取任何动作,因此我们认为该状态下所有动作的值为零。
- 对于每一集,我们都必须“初始化S”,这只是说“重新开始游戏”的一种奇特方式,在我们的情况下,这意味着将玩家置于开始位置。 在我们的世界中,有一种方法可以做到这一点,我们在第6行将其称为。
- 对于每个时间步长(每次我们需要采取行动),我们必须选择从Q中获得的行动。
记得,我说过:“我们是否在每种情况下都采取了最有价值的行动?
执行此操作时,我们使用Q值创建策略; 在这种情况下,这将是一个贪婪的政策,因为我们一直认为在每个州都采取最好的行动,因此,我们被称为贪婪地行动。
垃圾
但是这种方法存在一个问题:假设我们处于一个迷宫中,有两个奖励,一个奖励为+1,另一个奖励为+100(每次找到其中一个,游戏都会结束)。 由于我们总是采取我们认为是最好的行动,因此我们将被困在发现的第一个奖项上,并一直返回,因此,如果我们首先承认+1奖项,那么我们将错过+100大奖。
解决方案
我们需要确保已经充分研究了我们的世界(这是一项非常艰巨的任务)。 这就是ε起作用的地方。 贪婪算法中的ε意味着我们必须热心行动,但要随时间做ε百分比的随机动作,因此,在进行无数次尝试后,我们必须检查所有状态。
根据第12行中的此策略选择操作,epsilon = 0.1,这意味着我们有10%的时间在世界上进行研究。 该政策的执行情况如下:
def egreedy_policy(q_values, state, epsilon=0.1):
在第一个清单的第14行中,我们调用step方法执行操作,世界将向我们返回下一个状态,奖励和有关游戏结束的信息。
回到数学:
我们有一个长方程,让我们考虑一下:

如果我们取α= 1:

完全符合我们在几段前所看到的Bellman方程! 因此,我们已经知道这是负责传播有关状态值的信息的行。
但通常α(通常称为学习速度)远小于1,它的主要目标是避免一次更新发生较大变化,因此我们要慢慢接近它,而不是飞向目标。 在我们的表格方法中,设置α= 1不会引起任何问题,但是在使用神经网络时(以下文章中将对此进行详细介绍),所有事情都很容易失控。
查看代码,我们看到在第一个清单的第16行中,我们定义了td_target,这是我们应该更接近的值,但是我们没有直接转到第17行中的该值,而是计算td_error,而是将这个值与速度结合使用学习慢慢地朝目标迈进。
请记住,这个等式是一个Q学习实体。
现在我们只需要更新状态,一切就绪,这就是第20行。我们重复此过程,直到到达情节的结尾,死在岩石中或达到目标为止。
结论
现在,我们直观地了解并知道如何编码Q-Learning(至少是表格形式),请确保检查用于该帖子的所有代码(可在GitHub上找到) 。
可视化学习过程测试:
请注意,所有动作均以超出其最终价值的价值开始,这是刺激探索世界的一种把戏。