您好,亲爱的参与者和网站的客人。 在本主题中,我将尽量简短。 近年来机器人技术的兴起,对这个话题的大量关注让我无动于衷。
追求童年时代梦想制造机器人,我去了
cyber-place.ru论坛,以搜索大约一年前的信息(不考虑将其用于广告)。 在我最疯狂的幻想中,我想到了创建自己的网真机器人,该机器人能够在空间,视频和双向音频通信中移动,并能够通过电话或计算机进行远程控制。 我受到基于带有Cyberwrt固件的tplink 3020路由器的模型的启发。 由于反复试验和电子设备烧毁,缺乏对该主题的知识和教育上的巨大差距并没有妨碍我狂躁地追求结果的渴望。
经过将近一年的“从我的错误中吸取教训”,出现了第一个结果,即一台能够通过基于Cyberbot -3的Internet进行控制的机器,为此,感谢开发人员,他们的工作非常出色! (对我来说,编程和创建软件仅是空间!)打字机,设备和详细说明的人很多,它们遍及Internet。 因此,对此我不做解释。

此外,对设备自主性的需求不断增加,它(通过即兴的方式)建立了一个“充电站”,并在机器人的前面固定了弹簧触点。 机器人的主电源选择为4.2V,以便可以通过5V电源进行充电。 为了增加充电电流,两个TP4056模块并联焊接。 通过电话,浏览器通过Internet来管理所有这些经济活动。


在我决定使用足够的模型后,我需要继续。 不幸的是,我没有找到一种方法来管理基于主控制器的设备(我认为一切仍在进行中)。
由于此设备不允许双向音频通信,因此我找不到更好的方法来使用DS-2CD2432F-IW CCTV摄像机,该摄像机支持android上的第三方软件(tinyCam PRO),可以进行视频监控和双向音频。 最初,有一个(疯狂的)想法连接到相机的工程连接器以读取uart,使用标准的相机软件来控制机器人手推车的移动。 使用PTZ摄像机移动。 我计划考虑当我用不旋转的摄像头向左,向右,向下,向上按下时,哪些团队在uart上,然后将这些命令驱动到uart arduino nano,后者应该控制马达,所以我想为我自己解决主要问题,而不是编写软件。 这个想法并不成功,制造商阻止了这些命令,只是当您单击uart中的PTZ按钮时出现消息“ ptz not support”(不支持ptz),但没有任何反应。
因此,“带轮摄像头”而不是网真机器人是我努力的结果。
为了通过电话控制设备,我使用了在android上打开多个应用程序的功能,即所谓的“浮动窗口”(在更高版本中,它无需第三方应用程序(例如浮动应用程序)即可工作)。 您必须打开两个应用程序,tinyCam PRO用于访问摄像机界面,浏览器用于访问购物车控件。
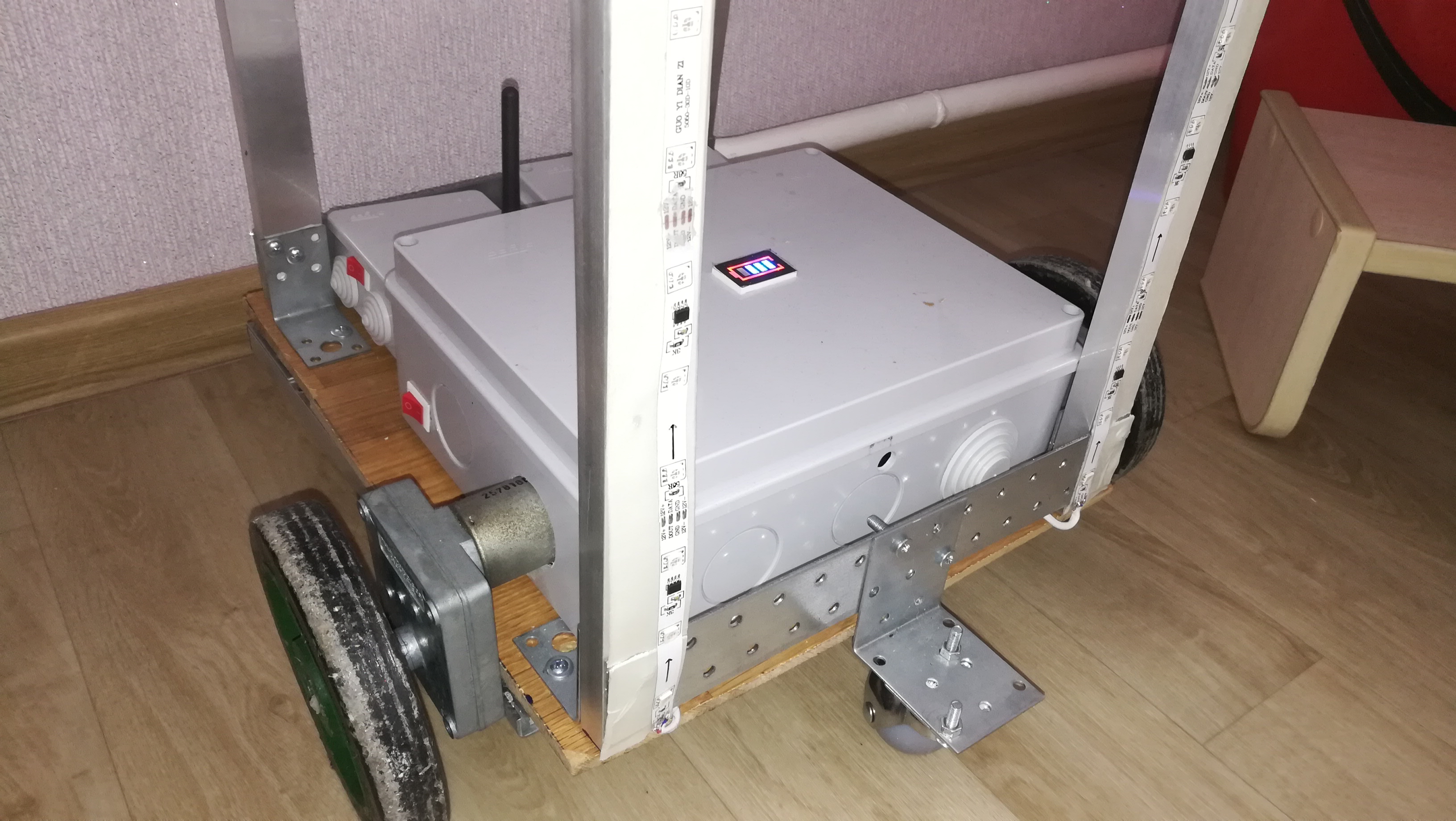
因此,结果是:将一个电气接线盒作为用来托管带有CyberWRT固件的tp链接3020设备的盒子,一个焊接天线,在我的情况下为+ 10dB,一个arduino nano从路由器的Web界面接收uart命令,一个用于控制功能强大的电机齿轮箱的怪兽电机罩从旧老虎机。

机器人的高度为165厘米,重量约为10公斤,功率为12.6V(锂组件18650 +带平衡器的充电控制器),用一罐蛋黄酱代替隐藏相机的头部,将相机的专职扬声器替换为5瓦扬声器,以便让我听到更好的声音。 眼睛-从照明灯下方的反射器中插入两个LED,通过Cyberbot界面控制眼睛,两个地址LED灯带和一个附加的arduino pro mini控制器对其进行控制(感谢Alex Guyver,他的项目“火灯”被撕裂了)。
磁带是通过中继模块(根据命令)还是通过Cyberbot接口来控制的。
出现尴尬的外观是由于机器人在3月8日盛装打扮并向同事表示祝贺。 (机器人在一个僻静的地方由我控制,从终结者那里跳出来欣赏音乐,灯光音乐和LED的平滑融合让我感到困惑,听众很高兴)。


将来,我计划用机械手掌握工作,删除所有“不必要的东西”,选择必要的设备(用ESP32替换路由器和arduino)和软件,以便甚至我的祖母也可以管理“设计” :))这个主题没有完全公开,我没有涵盖很多点为了不耽误您的冗长文章,如果您喜欢这个话题,我期待您的批评和建议。