在很多情况下,此时此刻需要访问服务器。 但是,SSH连接并不总是最方便的方法,因为SSH客户端,服务器地址或用户/密码链接可能并不在手。 当然,有
Webmin ,它可以简化管理,但也不能提供即时访问。
因此,我决定实施一个简单但有趣的解决方案。 即,编写一个Telegram机器人,该机器人从服务器本身开始,将执行发送给它的命令并返回结果。 研究
了有关该主题的
几篇 文章之后 ,我意识到还没有人描述这种实现。
我在Ubuntu 16.04上实现了该项目,但是为了在其他发行版上无故障启动,我尝试以常规方式进行所有操作。
机器人注册
用@BotFather注册一个新的机器人。 我们发送给他
/newbot并在文本中进一步说明。 我们将需要新机器人的令牌和您的ID(例如,您可以从
@userinfobot获得它)。
Python准备
要启动该机器人,我们将使用
telebot库(
pip install pytelegrambotapi )。 使用
subprocess库,我们将在服务器上执行命令。
机器人启动
在服务器上,创建bot.py文件:
nano bot.py并将代码粘贴到其中:
from subprocess import check_output import telebot import time bot = telebot.TeleBot("XXXXXXXXX:AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA")
我们将其中的机器人令牌替换为@BotFather颁发的机器人令牌,并将user_id替换为您帐户的ID值。 检查用户ID是必要的,以便该bot仅向您提供对服务器的访问。
check_output()函数执行传递的命令并返回结果。
它仍然只是启动机器人。 要在服务器上启动进程,我更喜欢使用
screen (
sudo apt-get install screen ):
screen -dmS ServerBot python3 bot.py
(其中“ ServerBot”是进程标识符)
该过程将在后台自动启动。 让我们进入与机器人的对话,并检查一切是否正常运行:

恭喜你! 机器人执行发送给它的命令。 现在,要访问服务器,您只需要打开与机器人的对话框即可。
重复命令
通常,要监视服务器的状态,您必须执行相同的命令。 因此,重复执行命令而不再次发送命令将非常不合适。
我们将使用消息下方的嵌入式按钮来实现:
from subprocess import check_output import telebot from telebot import types
重新启动机器人:
killall python3 screen -dmS ServerBot python3 bot.py
再次检查一切是否正常:
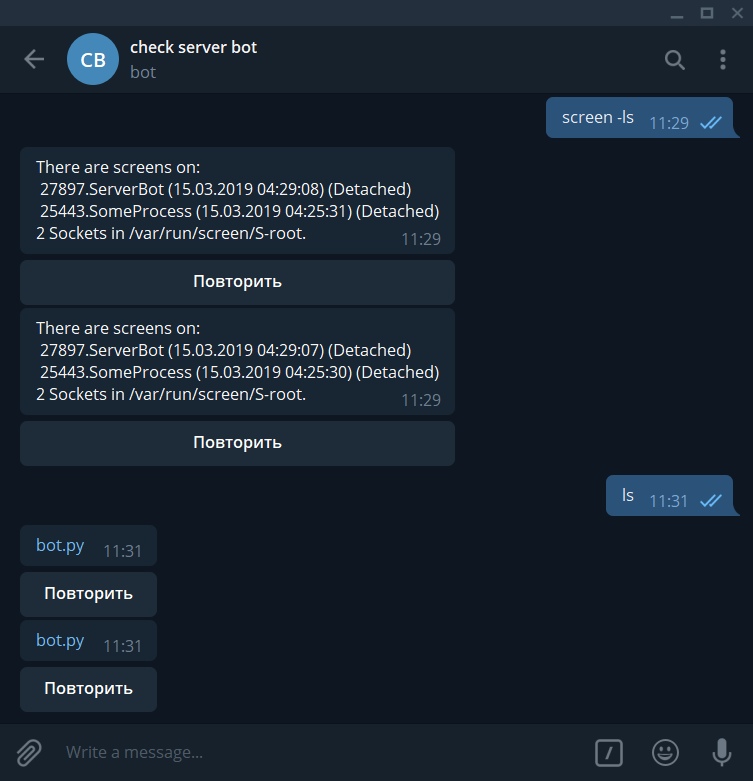
通过按下消息下方的按钮,机器人应重复发送消息的命令。
而不是结论
当然,该方法不能伪装成经典连接方法的替代方法,但是,它使您可以快速了解服务器的状态,并向其发送不需要复杂输出的命令。