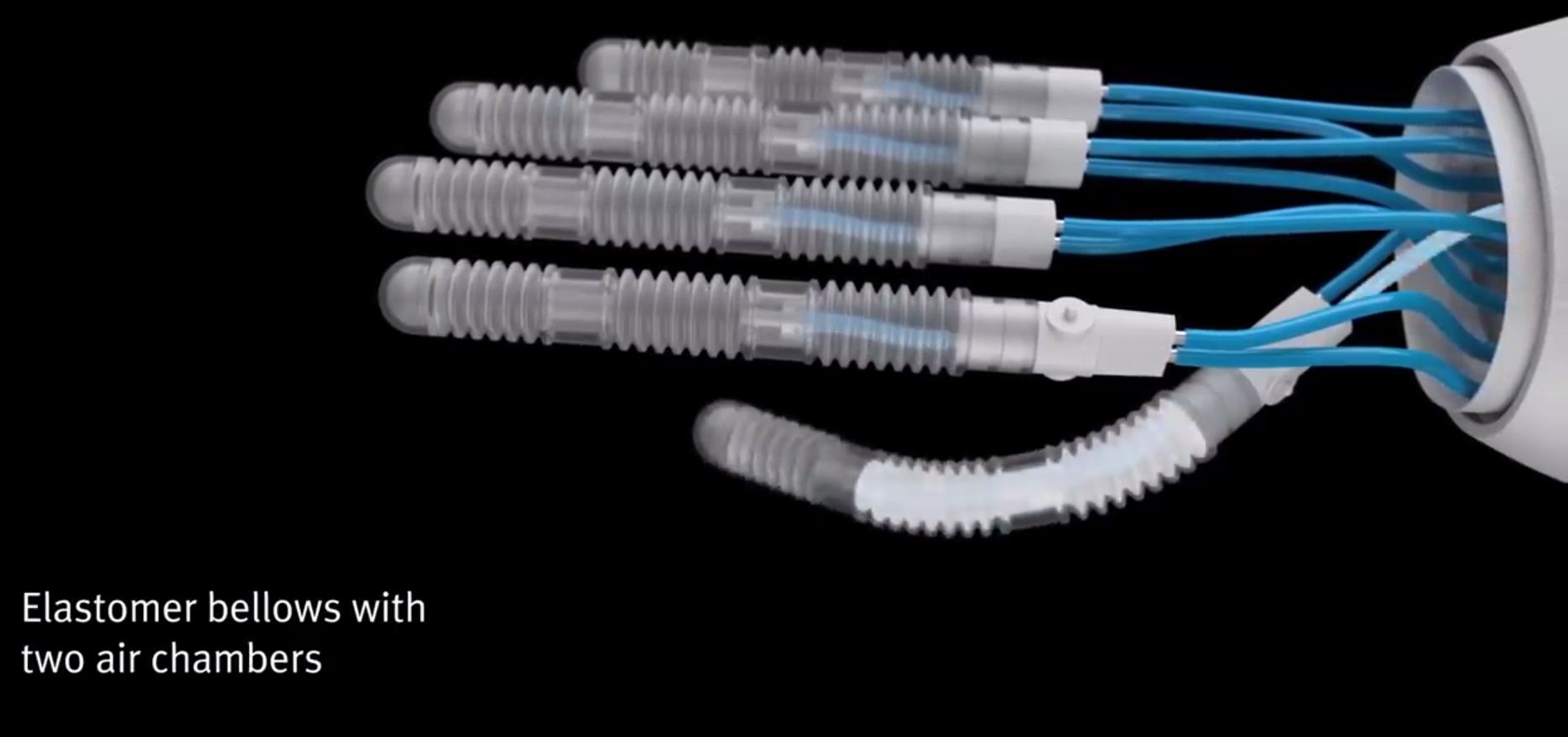
该解决方案没有骨骼结构,手由柔软灵活的材料制成,手指的指骨由具有触觉传感器和可通过气动模块弯曲的柔性导体的三维纺织面料制成。 手腕上装有带阀门的结,如有必要,可通过精细的电机运动来致动手部元件。
BionicSoftHand的动作由人工智能控制,能够通过反复试验来学习,并且在适应任务之后,可以快速,自主地对物体执行必要的动作,类似于人的行为

链接到
BionicSoftHand解决方案制造商的描述。
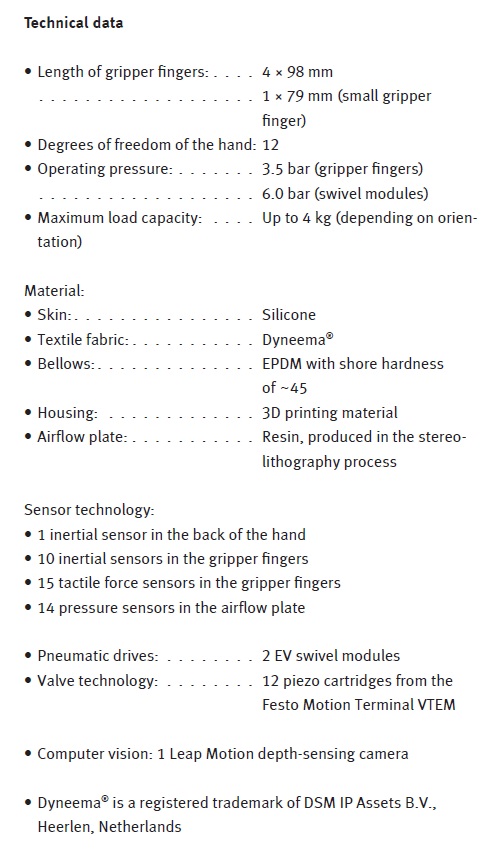
 BionicSoftHand机械臂配有:
BionicSoftHand机械臂配有:-充气式风箱,其周围是由3D打印的弹性纤维制成的三维织物,当空气进入风箱时,它会随着手的运动而弯曲,类似于肌肉和肌腱的工作;
-气动旋转模块;
-24个压电阀的阀岛;
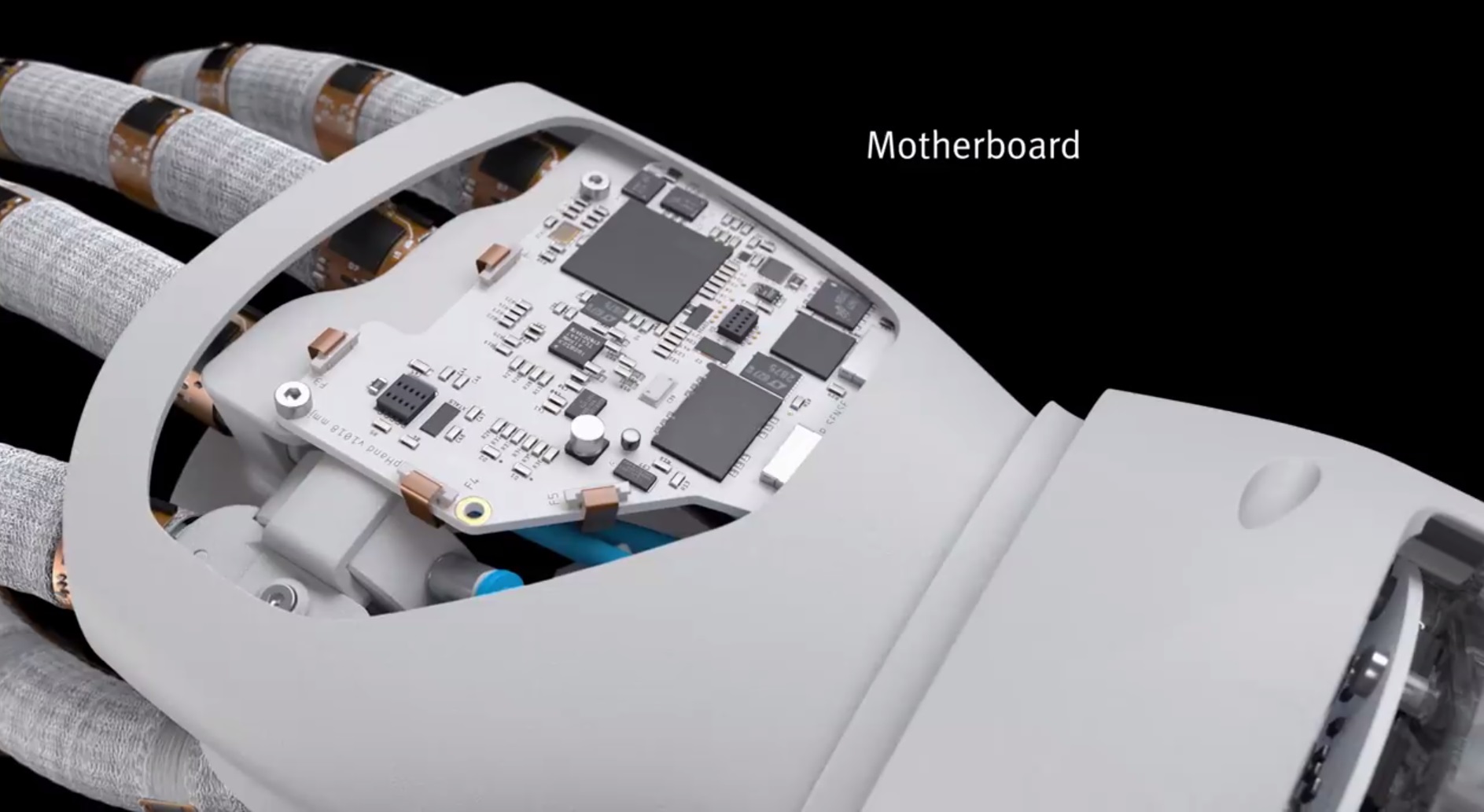
-板载主板,包括用于自主运动控制的主板;
-惯性(运动)和力传感器(安装在柔软的手指中),它们也是基于柔性材料制成的,并且能够在运动时弯曲;
-自学AI模块,能够独立计算与不同物体交互并执行各种动作的最佳方式,并在最短的时间内从具有深度感知能力的3D相机接收数据,以分析物体和运动。
设备组件的技术特征:


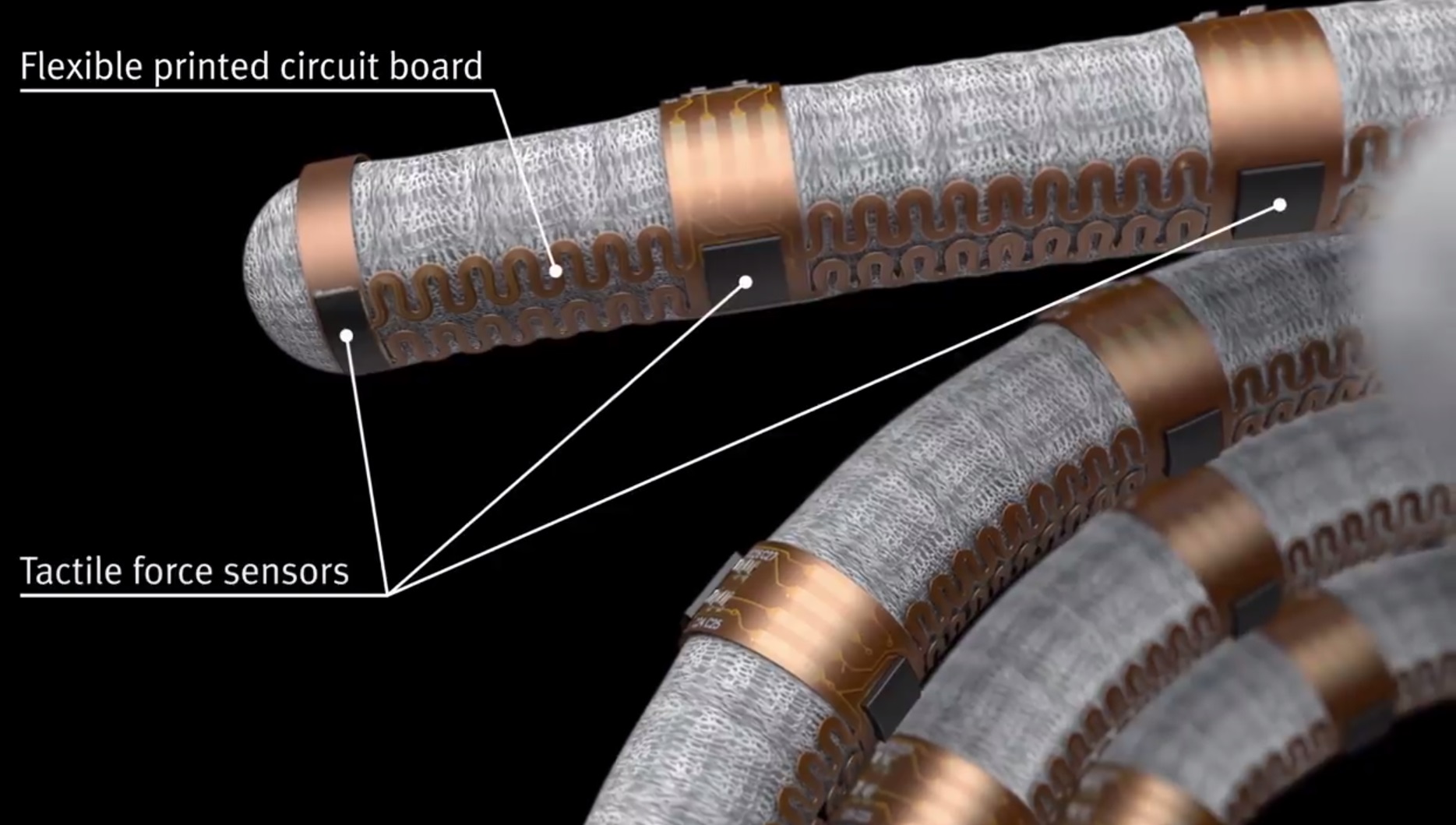





手手指上的一系列触摸传感器向手的控制系统(具有AI的组件)提供反馈,报告手和手指的运动以及与不同对象接触的方法和运动,同一AI分析有关其是否正确的信息使用接触感知矩阵模仿对象的触摸感,将对象放置在手中进行操作。 此外,AI计算应该采取什么措施来握住对象,应该对手指的位置和动作执行哪种运动顺序,打开手掌的宽度等等。

最初,没有对BionicSoftHand的手进行任何特定动作的编程,并且连接到其控制板的AI在使用并行学习技术执行测试任务的过程中进行了训练,并在虚拟环境中创建,随着时间的流逝,机械臂只能变得“更智能”,但对于解决新问题的方法,以使用已经通过实际动作进行研究和验证的动作组合,然后针对新任务进行优化。

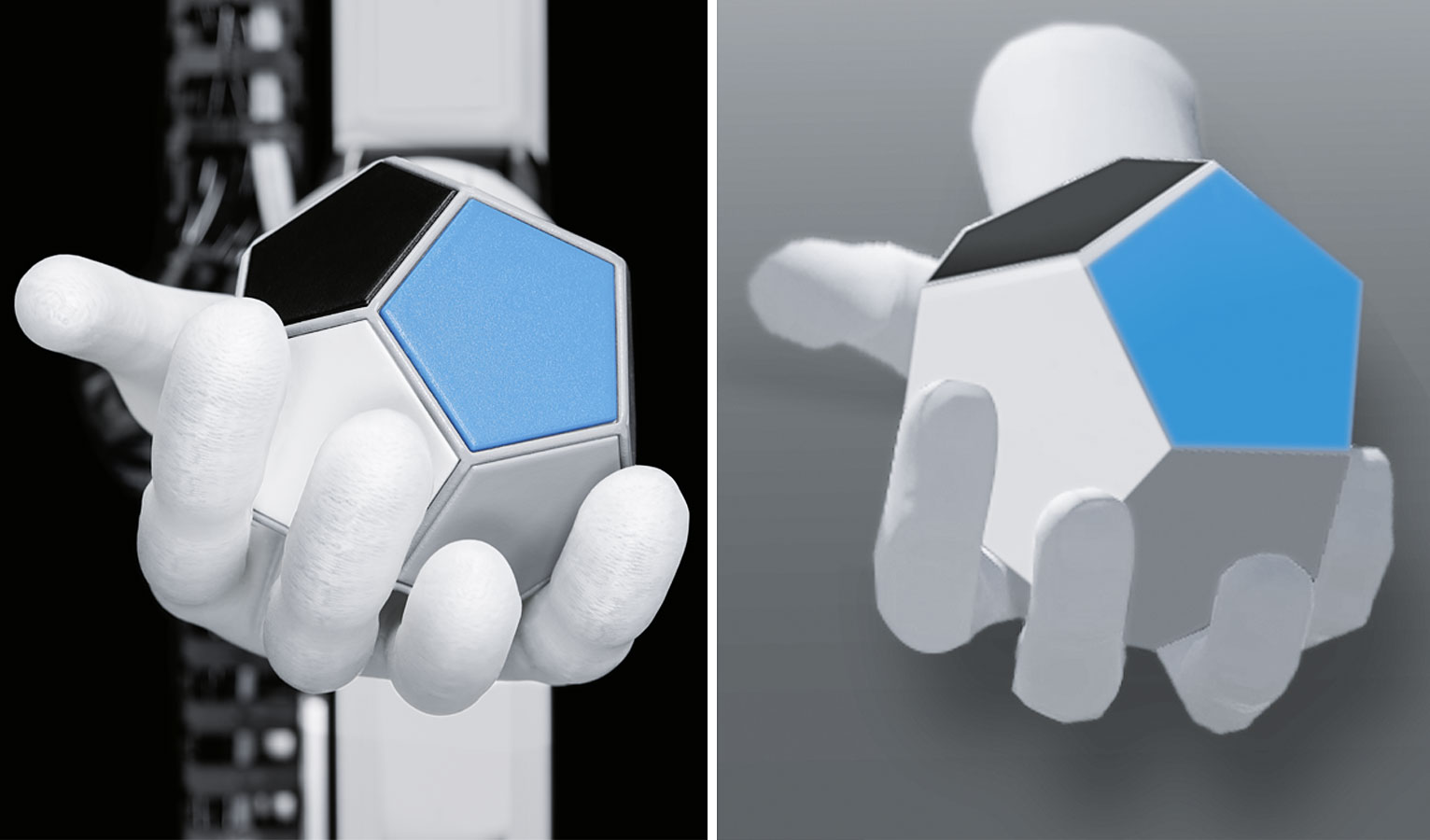

在下面的演示视频中,赋予了具有机械臂的AI的任务是移动放置在手中的12面对象,以便抬起特定的面孔,而无需说明完成此任务的步骤。
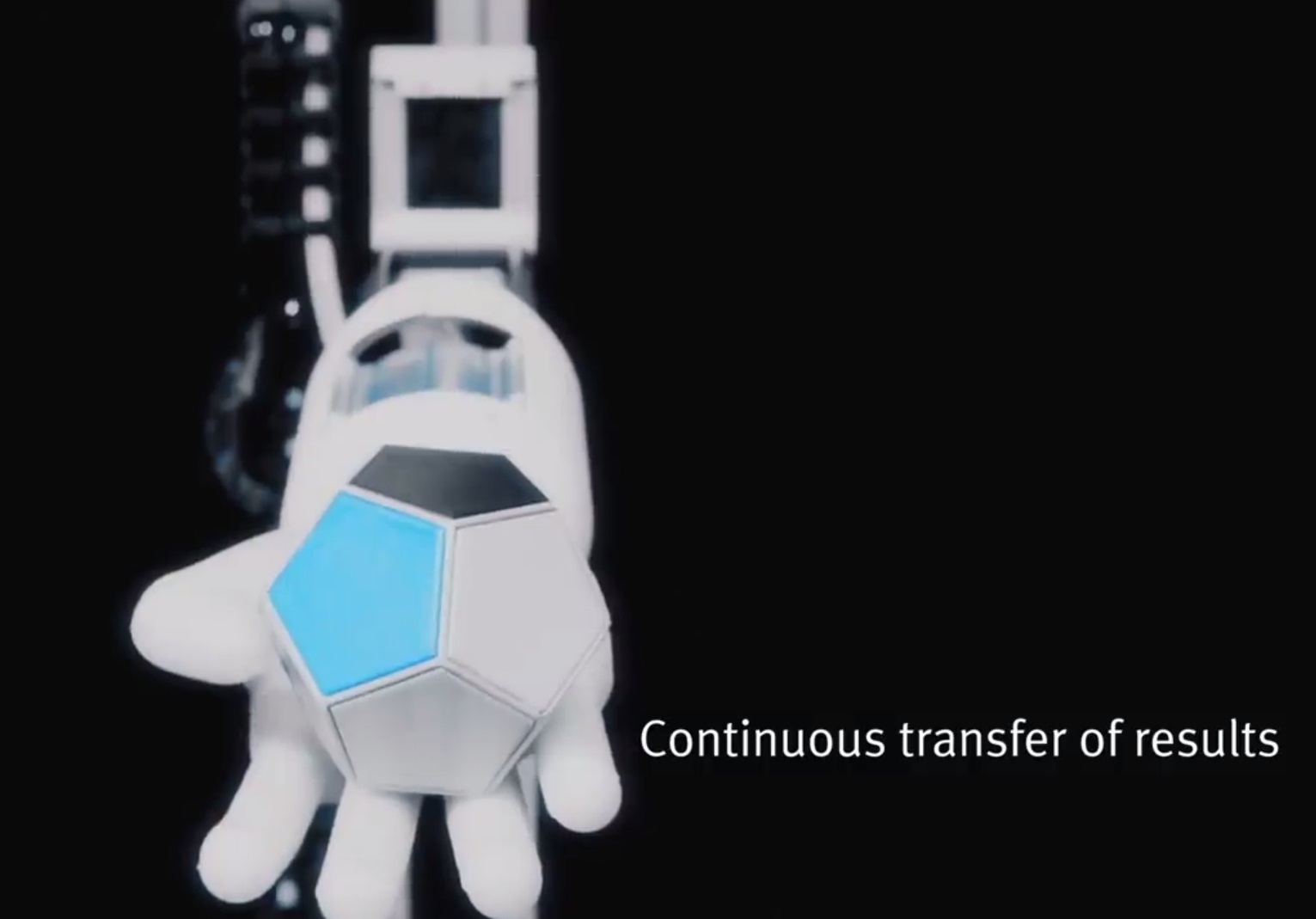
首先,AI使用具有深度感知功能的3D摄像机创建对象的数字副本,然后使用许多操纵对象的虚拟手将其置于虚拟仿真中,直到选择了正确的组合。
然后,AI会计算选项,以找到对象并快速执行最佳操作,然后在现实中执行这些操作,并控制BionicSoftHand的元素。
Evgeny Veltistov创造电子产品的组件越来越接近现实。