今天,我们正在准备一台PTZ摄像机,并详细考虑其铁组件,以了解其工作原理。
在剪裁之前,让我们先看一下
如何使视频通信足够舒适,以使参与者感觉到它是生活? 如果摄像机不仅捕获房间的总体规划,而且捕获特定的参与者,则可以实现这种效果。 场景之间的过渡应该快速,顺畅,以便交流不会引起不适,也不会分散参与者讨论工作问题的注意力。
如何实现呢? 有两种选择:
- 从总体计划中以编程方式从相机捕获的图像中切出所需的部分(根据非我们的计划,裁剪);
- 或安装PTZ摄像机。 它们带有机械或磁力驱动器。
我找不到带磁驱动器的相机。 但是,周围有机械师的摄像机只有一角钱。 我还拆卸了在俄罗斯联邦广泛使用的PTZ FullHD摄像机模型,以了解其逻辑和工作原理在10年的发展历程中是如何变化的。 因此,让我们开始吧!

腾保-高清精密摄像机TTC8-01
因此,我们将从挪威Tandberg公司的一款非常常见的PTZ摄像机开始。 正是这款摄像机迁移到思科网真产品线而没有任何重大变化,并一直销售到2010年代初。

腾保(Tandberg)曾经制造过优质的PTZ摄像机,并且通过严格,简洁的设计以及外壳的金属零件占主导地位告诉我们。
从外观上看,Tandberg看起来非常容易理解-光学元件和矩阵放置在银管中,移动机构将相机连接到底座。
这款相机的简要TTX分辨率:1280 x 720(高清)
变焦:7倍光学
矩阵:1/3“ CMOS
最小焦距:0.3 m
可视角度:42 0
水平旋转:180 0 (+90 0 ..- 90 0 )
垂直倾斜度:30 0 (+10 0 ..- 20 0 )
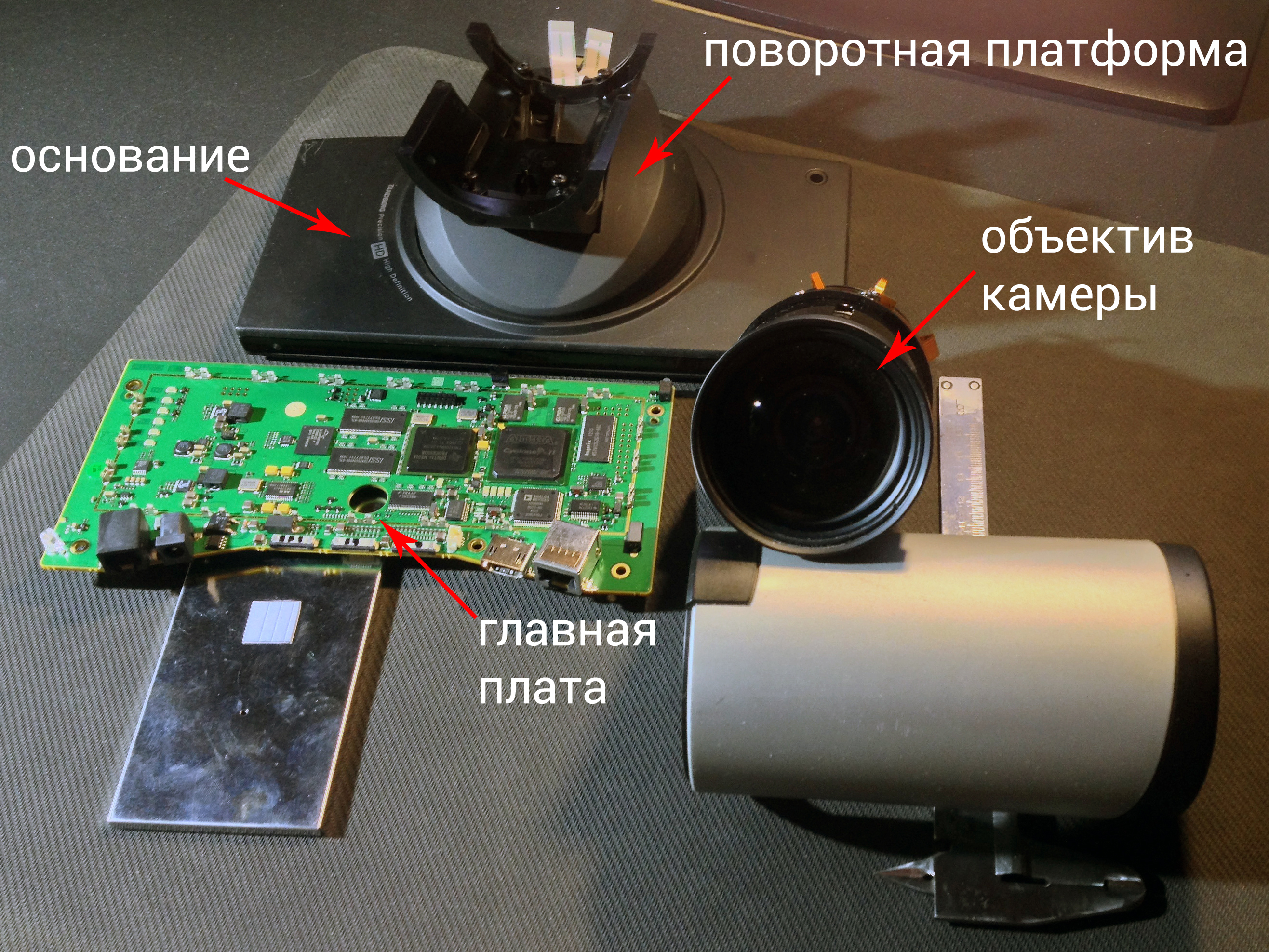
坚固的金属底座为摄像机增加了稳定性,并可靠地保护了带有电子设备的主板免受外部影响。 在此基础上定位转盘。

摄像机底座在位于移动平台内部的专用辊上滚动。 该机构的操作类似于平衡金属圆柱上的杂技演员马戏团。
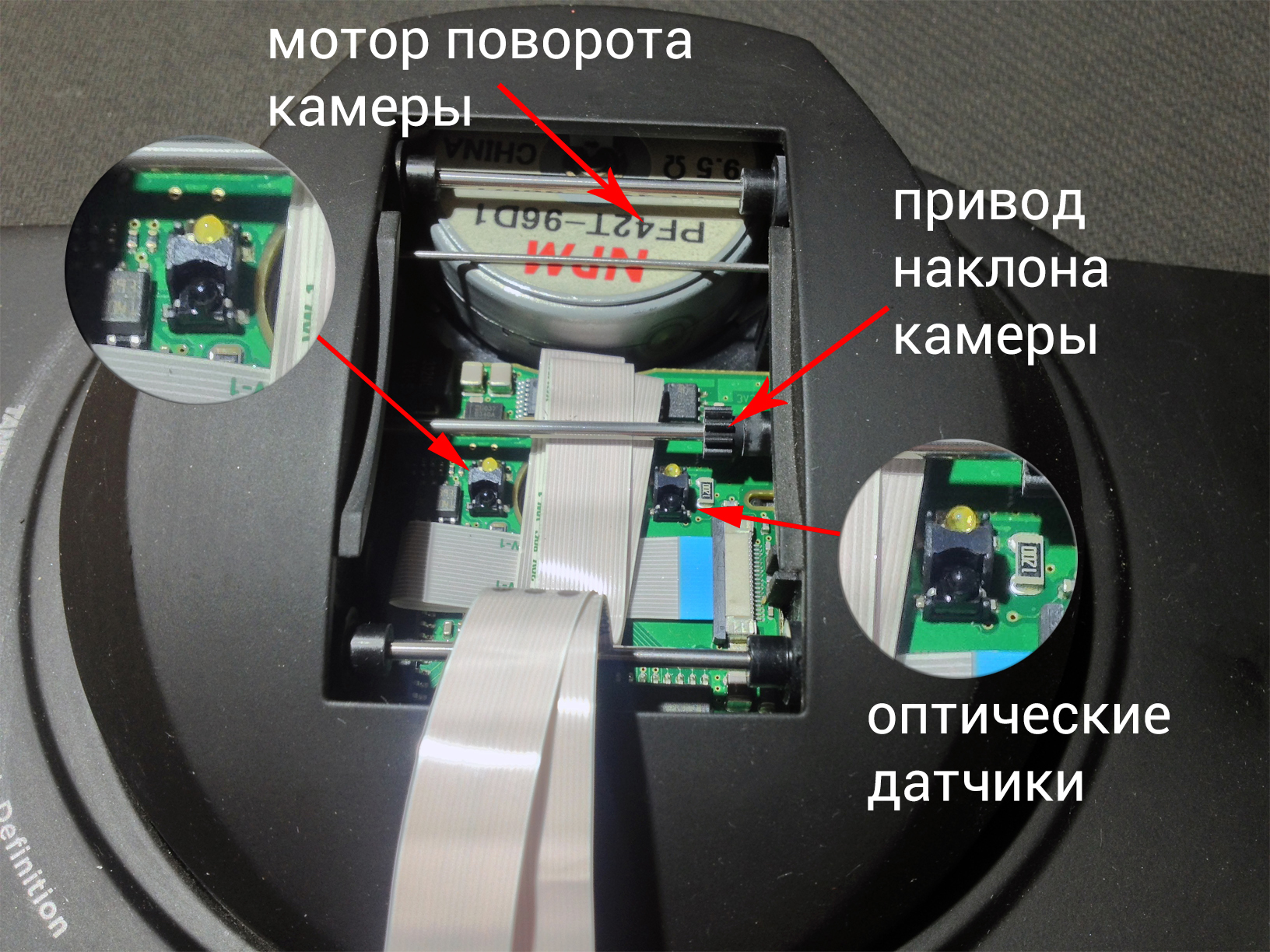
该单元由具有齿轮的普通电动机驱动,室的腔室沿着该齿轮滚动。 为了展示这种机制的工作原理,我必须揭露旧的Autodesk Fusion。

调用光学传感器在每个时间监视收集器电机,这些传感器根据反射光中的标记确定倾斜角度。 为此,在齿轮架的内部安装了两个特殊的垫板,它们形成了反射光的中断,从而决定了摄像机的角度。
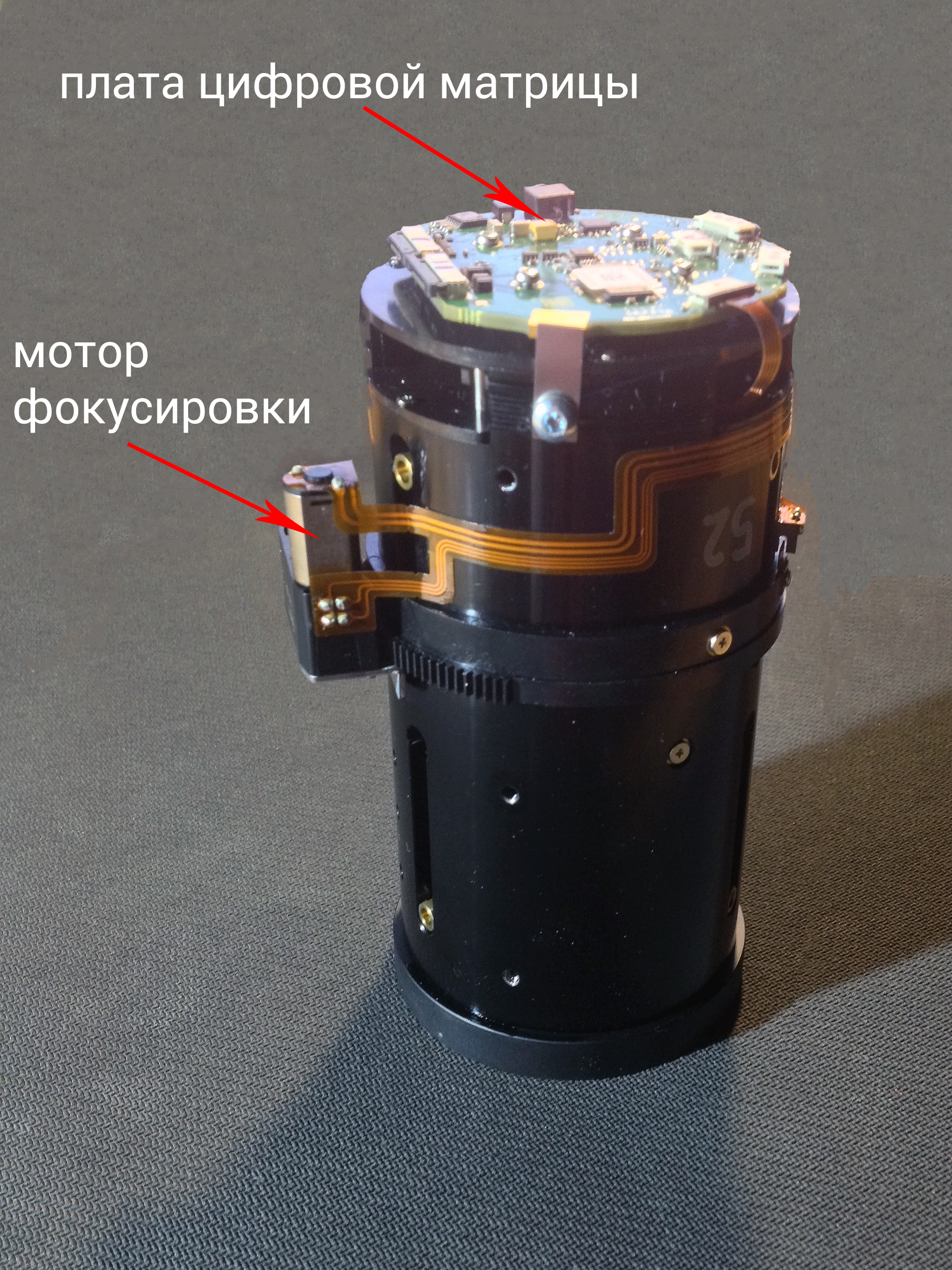
 为了使低功率收集器电机能够应对照相机的笨重光学元件,必须对镜头进行平衡,以使重心与电机轴重合。 摄像机后部的巨大负载可提供相同的平衡。
为了使低功率收集器电机能够应对照相机的笨重光学元件,必须对镜头进行平衡,以使重心与电机轴重合。 摄像机后部的巨大负载可提供相同的平衡。
圆顶下方是另一个驱动马达,可左右旋转摄像机。 但是,它与收集器的结构不同之处在于,轴以小步长旋转(1步= 3,750),也就是说,一整圈需要3,600 / 3,750 = 96步。 另外的好处是将轴保持在设定位置。
为了稳定PTZ摄像机的图像,有一些机制可以保持给定的位置,这意味着如果您用双手和毅力将摄像机对准另一侧,则摄像机内部的塑料部件会很快损坏(如果不是立即)。
对于关闭的相机,此规则适用。 如果您不涉及理论力学的复杂性,那么我们可以说塑料齿轮可以将旋转从电动机传递到相机节点,反之亦然。
而关于最重要的事情-关于相机。 从结构上看,它看起来像一台反光照相机,只是没有五棱镜和镜子。 焦距由收集器电机和机械齿轮控制:这些当然不是现代“ DSLR”的超声波电机,但是固定式摄像机的小重量和尺寸根本不是关键指标。
电子产品
 德州仪器(TI)的数字信号处理器在2000年代初具有先进的计算能力,能够每秒执行近60亿条指令,控制着所有事情。 当时,它是SoC(片上系统)格式的高级解决方案,其中实现了多级L1 / L2缓存,与外部RAM的64位接口,10/100 Mbps以太网,3个具有多种支持的视频端口权限以及其他外围设备的管理。
德州仪器(TI)的数字信号处理器在2000年代初具有先进的计算能力,能够每秒执行近60亿条指令,控制着所有事情。 当时,它是SoC(片上系统)格式的高级解决方案,其中实现了多级L1 / L2缓存,与外部RAM的64位接口,10/100 Mbps以太网,3个具有多种支持的视频端口权限以及其他外围设备的管理。
 当时的下一个高级微电路是Altera Cyclone2。实际上,它是普通的FPGA(可编程逻辑集成电路)。 设备制造商可以针对任何任务对此类电路进行编程,从控制伺服驱动器到传输存储器数据。
当时的下一个高级微电路是Altera Cyclone2。实际上,它是普通的FPGA(可编程逻辑集成电路)。 设备制造商可以针对任何任务对此类电路进行编程,从控制伺服驱动器到传输存储器数据。
 HDMI版本1.3由AD9889B芯片实现,该芯片支持FullHD(1080p)分辨率,并具有使用HDCP v技术传输媒体内容的保护。 1.2。
HDMI版本1.3由AD9889B芯片实现,该芯片支持FullHD(1080p)分辨率,并具有使用HDCP v技术传输媒体内容的保护。 1.2。
其余组件是设计用于操作基本元件的内存模块和无源无线电组件。
主题2:CleMic 1012w
这款相机的简要TTX分辨率:1920 x 1080(全高清)
变焦:12倍光学
矩阵:1 / 2.8英寸CMOS HD传感器
最小焦距:0.3 m
可视角度:72.5 0
水平旋转:340 0 (+170 0 ..- 170 0 )
垂直倾斜度:120 0 (+90 0 ..- 30 0 )
相机机身完全由塑料制成,底座宽且稳定。 摄像机的正面有用于遥控器的IR接收器,背面有接口连接器。 相机的重量很小:我想它可以挂在天花板的阿姆斯特朗上或固定在石膏板上。

与Tandberg的步进电机作为驱动力进行工作相比,移动轴的组织结构更加简单易懂,将扭矩传递至驱动轮。
移动平台具有2个中空机架,摄像机固定在中空机架之间,其中一个机架的空腔中隐藏了驱动机构,因此倾斜角度会发生变化。
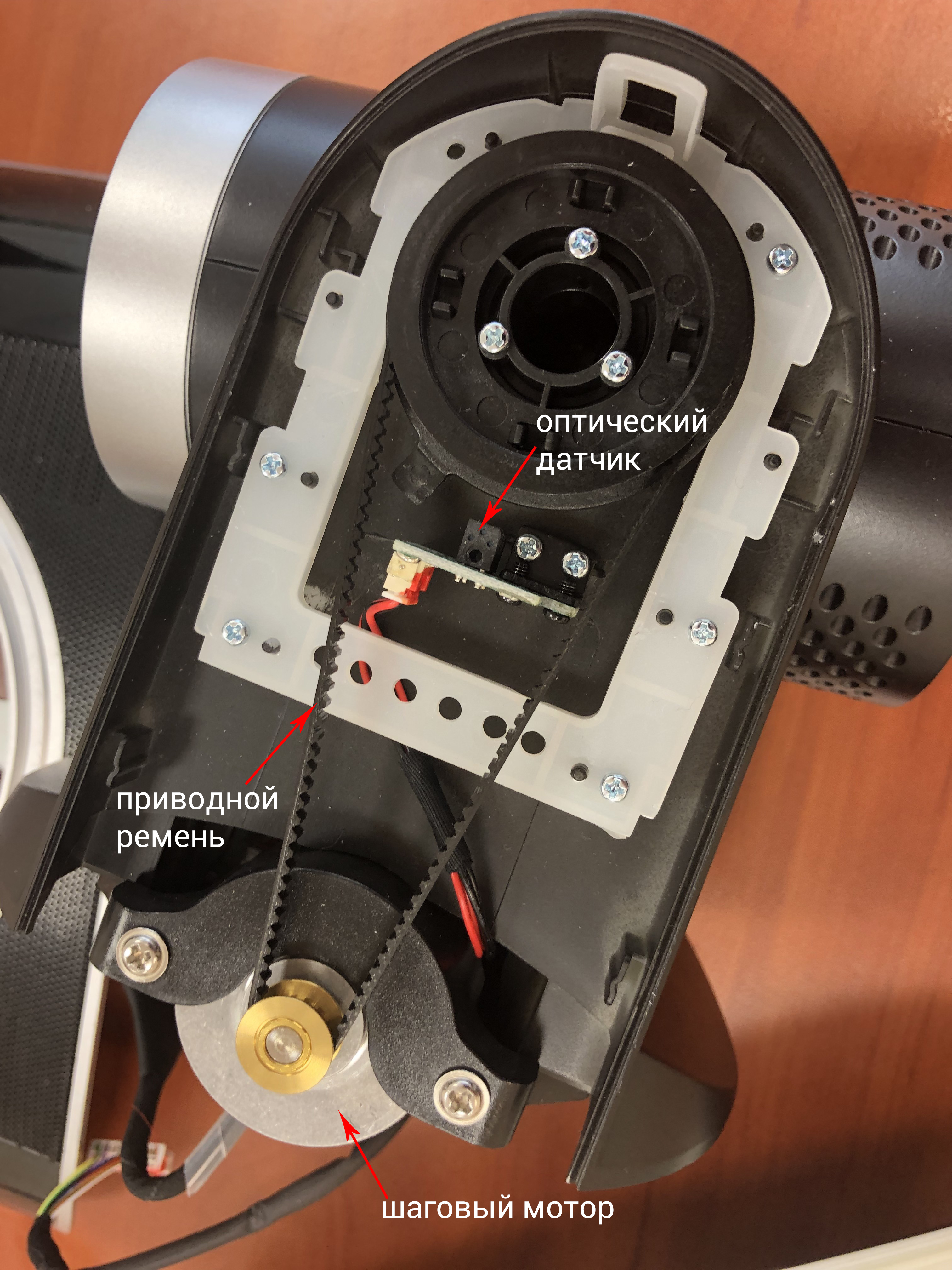
光学传感器比驱动皮带轮低一点。 打开相机后,需要该拖车来确定摄像机的位置。
启动时,镜头会向下倾斜,并且当特殊的尖峰信号中断了光学传感器中的光流时,系统就会意识到已达到最低点。 所有进一步的定位都是通过计算步骤来完成的。
左右旋转摄像机的电机通过6个螺钉隐藏在配合法兰的后面,螺钉配有相同的挂车以确定摄像机的水平位置。
由于配合法兰是固定的,因此在中心有2条电缆:用于控制电动机的电缆和带有数字矩阵的电缆。
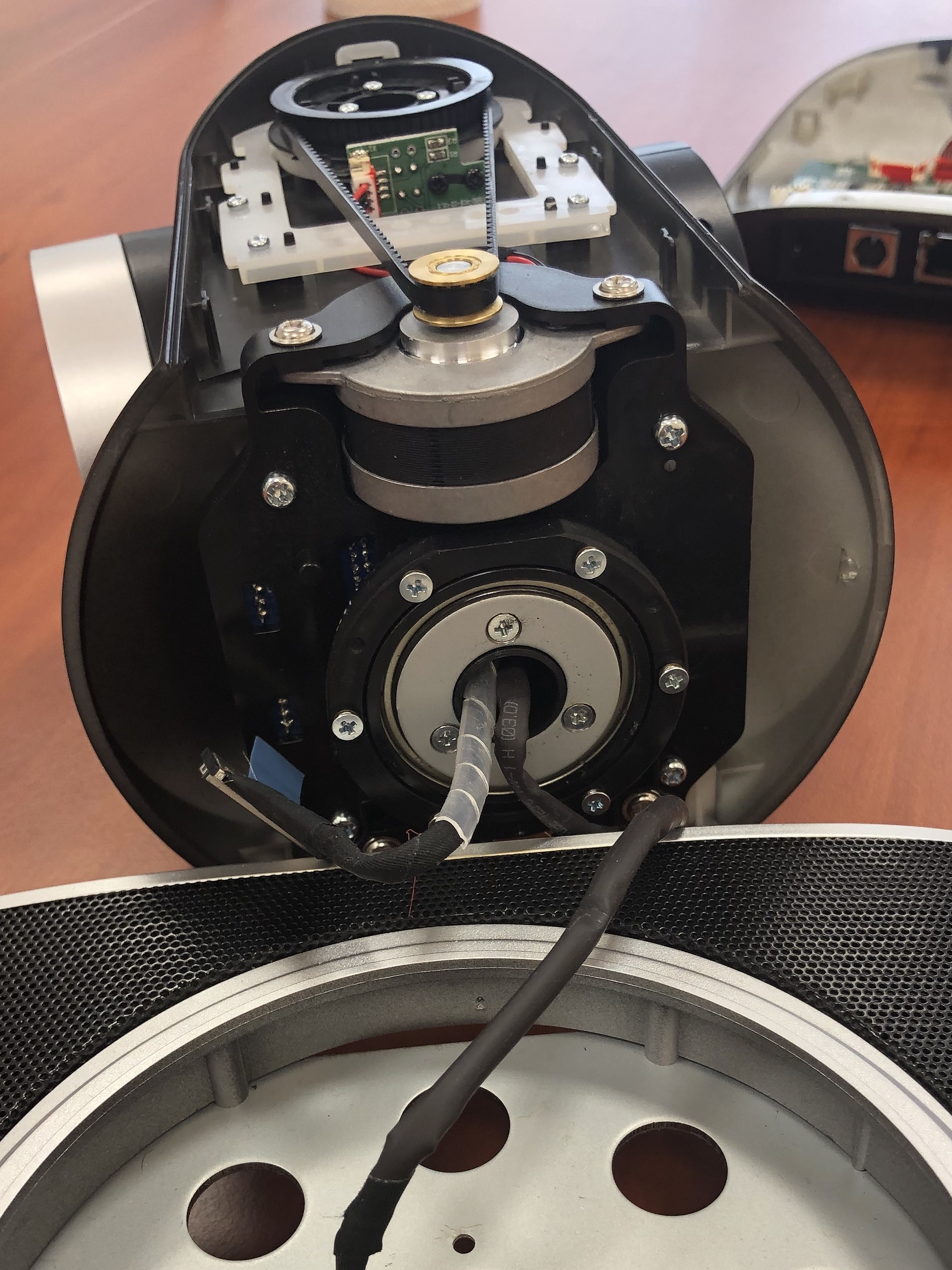
如我们所见,机械传动系统完全由强大的步进电机组成,这使摄像头的定位更加准确,更快,皮带驱动器降低了设备自身的噪音水平。

相机电子设备在很多方面都非常相似,因此我们最好谈一下明显的差异。 USB3.0和RS-232从新的产品中出现,借助它们,您可以获得压缩形式的视频,还可以组装级联的此类摄像机,并通过UART(RS232)完全自动对准会议参与者。
恕我直言
如您所见,现代PTZ摄像机在设计上更可靠,传感器更佳并且在连接方法上通用,但其他方面与它的前辈相距不远。 除了一个-价格,已经降低了5倍。 因此,今天我们看到越来越多的配备PC的会议室,这些PTZ野兽已不再是异国情调的会议室。