为了使人们受益,机器人需要像我们一样学习如何走路。

数十年来,机器人一直能够用两条腿走路。 如今,最先进的人形机器人可以在平坦和倾斜的表面上行走,爬楼梯和下楼梯,并在崎terrain的地形上行走。 有些甚至知道如何跳跃。 但是,尽管取得了这一进展,但在人,动物的灵巧性,效率和可靠性方面仍无法与具有腿的机器人进行比较。
现有的步行机器人会消耗能量,并在训练上花费过多时间。 他们常常失败和失败。 为了成为我们梦so以求的机器人助手,这些机器将必须学会遵循我们的做法。
我们绝对需要创建带有腿的机器人,因为我们的世界是为腿设计的。 我们遇到瓶颈,绕过障碍,上下楼梯。 车轮或毛毛虫上的机器人很难在我们适应身体的那些地方四处走动。
许多人形机器人的腿看起来都和我们的一样-臀部,膝盖,脚踝和脚。 但这就是结束相似之处的地方。 例如,如果我们将机器人按压地球的力与人类承受地球的力相同,那么事实证明它们常常是非常不同的。 大多数人形机器人起源于工业机器人手臂的早期实例,它们控制肢体,使其精确地沿着预定轨迹运动。 但是,用两条腿移动不需要像强度控制那么多的位置控制,它意味着广泛的灵活性和弹性-在机器人技术中称为顺应性,它使您可以应对意外的接触。
许多研究小组正在尝试制造刚性较低的机器人,使其能够以更具动感,更像人类的方式运动。 在这些项目中,最著名的可能是来自
波士顿动力公司的 Atlas ,这是一种能够在坚硬和柔软的土壤上行驶,越过原木甚至进行后空翻的人形机器人。 但是,再次比较最复杂的机器人和动物的运动,我们发现这些机器还不够。
我们缺少什么? 技术不是最大的问题:电动机足够强大,材料足够坚固,计算机足够快。 局限性显然是我们对步行方式的理解。
 Cassie机器人(左)和Agility Robotics的Digit
Cassie机器人(左)和Agility Robotics的Digit在俄勒冈大学的动态机器人实验室,我领导了一个研究小组,试图弄清步行的基本原理并将这些发现应用于机器人。 我还是位于俄勒冈州奥尔巴尼的初创公司
Agility Robotics的联合创始人兼技术总监,该公司正在研究步行机器人的商业用途。 2017年,我们向Cassie开放了世界,Cassie是一个两足平台,已出售给多个研究团队。 很快,我们的新机器人便可以进入世界:Digit的腿类似于Cassie的腿,但是他有传感器和一对手,他可以用来稳定,并在将来进行操纵。
无论是在实验室还是在公司中,我们都在努力创造一个未来,机器人可以在任何地方移动。 我相信,具有动态腿的机器人总有一天将能够帮助照顾家中的老人,在发生火灾和地震时参与救援行动,并将包裹运送到他们的家中。 腿部机器人还将允许创建外骨骼和假肢,这将有助于增加残疾人的活动能力。 他们最终将科幻机器人带入现实。
有些鸟跑得比他们的飞翔要好,甚至根本不飞。 鸵鸟,火鸡,珍珠鸡和鹌鹑不能像鹰一样飞翔,但可以步行快速移动。 我实验室的同事和伦敦大学皇家兽医学院的莫妮卡·日报(Monica Daily)花了无数小时来观察鸟类在实验室周围行走和奔跑。 我们想了解这些动物如何灵活敏捷地高效移动-但是大多数带羽毛的机器都可以在种子上工作!
在一个实验中,珍珠鸡沿着一条小路奔跑,然后踩在伪装成餐巾纸的孔上。 动物不知道它会进入坑,大约是其腿长的一半,但是它并没有绊倒,它的腿伸开并适应了奔跑中的凹槽。 在此过程中,发生了一些了不起的事情:鸟的大脑不需要感到和对愤慨做出反应,因为它的腿自己可以应付。
这为机器人开发人员提供了一个重要的想法:如果您首先创建一个机器人,然后决定对其进行编程以进行敏捷动作,那么您将不会成功。 与珍珠鸡一样,机器人的灵巧性主要来自其身体的机械特性,即所谓的被动动力学。 在开发带腿机器人方面,大多数项目都忽略了它。 通过在软件填充的同时仔细开发机器人的被动动力学,并将其引入集成系统中,可以增加机器人外观接近动物特征的机会。
值得注意的是,尽管我们从动物身上汲取了灵感,但我们并未重现鸟脚的形状或人脚的肌肉和骨骼构造。 我们希望了解动物运动的物理学,并从中得出一个抽象的数学模型,该模型可以理解,可以在计算机仿真中进行验证,并可以体现在真实的机器人中。 由于在创建机器人时,我们使用金属和电子设备而不是骨骼和大脑,因此使用相同的物理学,它们可能与动物截然不同。
一个最简单的数学模型描述了连接到一对理想弹簧(腿)的点质量(主体)。 当然,这种弹簧质量模型得到了简化。 它有点像破破烂烂的矮个子,没有考虑到脚上有关节,也没有考虑到脚没有在孤立的地方接触地面这一事实。 尽管如此,弹簧质量模型仍会产生意外结果。 在模拟中,她几乎可以重现人和动物用于行走和跑步的所有行走方式。
 第一步:ATRIAS机器人的腿不是人,但它是第一台表现出类似人的步态的机器
第一步:ATRIAS机器人的腿不是人,但它是第一台表现出类似人的步态的机器为了测试弹簧质量模型,我们开发了Biped机器人
ATRIAS ,其名称是我们的基本假设的缩写:
假设机器人是一个球体 (假设机器人是一个球体)。 想法是,机器人的被动动力学可以尽可能精确地重建带有弹簧支腿的点质量模型。
每条支腿均由以平行四边形组装的轻质碳纤维棒制成,称为铰接四连杆。
这种结构最大程度地减少了支腿的质量及其惯性,使系统更接近于弹簧质量模型。 我们在腿的上部装备了玻璃纤维弹簧,以物理方式实现模型的“弹簧”,处理与地面的碰撞并存储机械能。
刚开始,ATRIAS几乎站不住脚,我们以最高的支持将其支持。 但是我们改进了跟踪人体速度和倾斜度的控制器,机器人首先开始迈出第一步,然后自由走动实验室。 然后ATRIAS学会了从干扰中恢复过来-在一个实验中,我的学生向他投掷了球。 我们还把ATRIAS带到了大学橄榄球场,使其加速到最高时速7.6 km / h,然后迅速停下来。
为了更好地了解机器人在做什么,请想象您被蒙住了眼睛,踩着高跷行走,并且身体被地毯包裹着,无法用双手平衡。 您只能走的更远-这是ATRIAS所做的。 他甚至可以应对障碍,例如,途中遇到一堆柴火。
而且,尽管灵活性是重要的组成部分,但节约能源也非常重要。 我们通过测量称为运输成本[COT]的参数来确认机器人的成本效益。 它定义为能量消耗(功率)与重量和速度乘积的比值,用于比较移动的动物和机器的能量效率。 COT越低越好。 根据
一些 估计 ,在走路的人中,SOT为0.2,而在普通的人形机器人中,这个数字要高得多-从2到3。 我们的实验
表明 ,在ATRIAS的步行模式下,COT为1.13,这证明了动态机器人的
有效性 。 实际上,由几个锂聚合物电池供电-例如用于无线电遥控汽车的电池-ATRIAS可以工作约一个小时。
我们还
测量了机器人压在地面上的
力 。 我们将ATRIAS称重72.5千克(约等于一个普通人的体重)放在动力平台上-该工具通常用于运动医学中,通过测量反作用力来测量人的步态。 行走机器人时,我们记录了力的数据。 然后我的一个学生代替了ATRIAS,我们记录了他的脚步。 建立了支持反应随时间变化的关系图,我们看到它与机器人的图完全一致。 据我们所知,这是当今机器人人类步态动力学最现实的实现方式。
结果证实,可以在机器人中实现简单的动态弹簧质量系统。 它具有许多有用的属性,例如效率,可靠性和灵活性,并且深入人心。 现在该创建下一个机器人了。
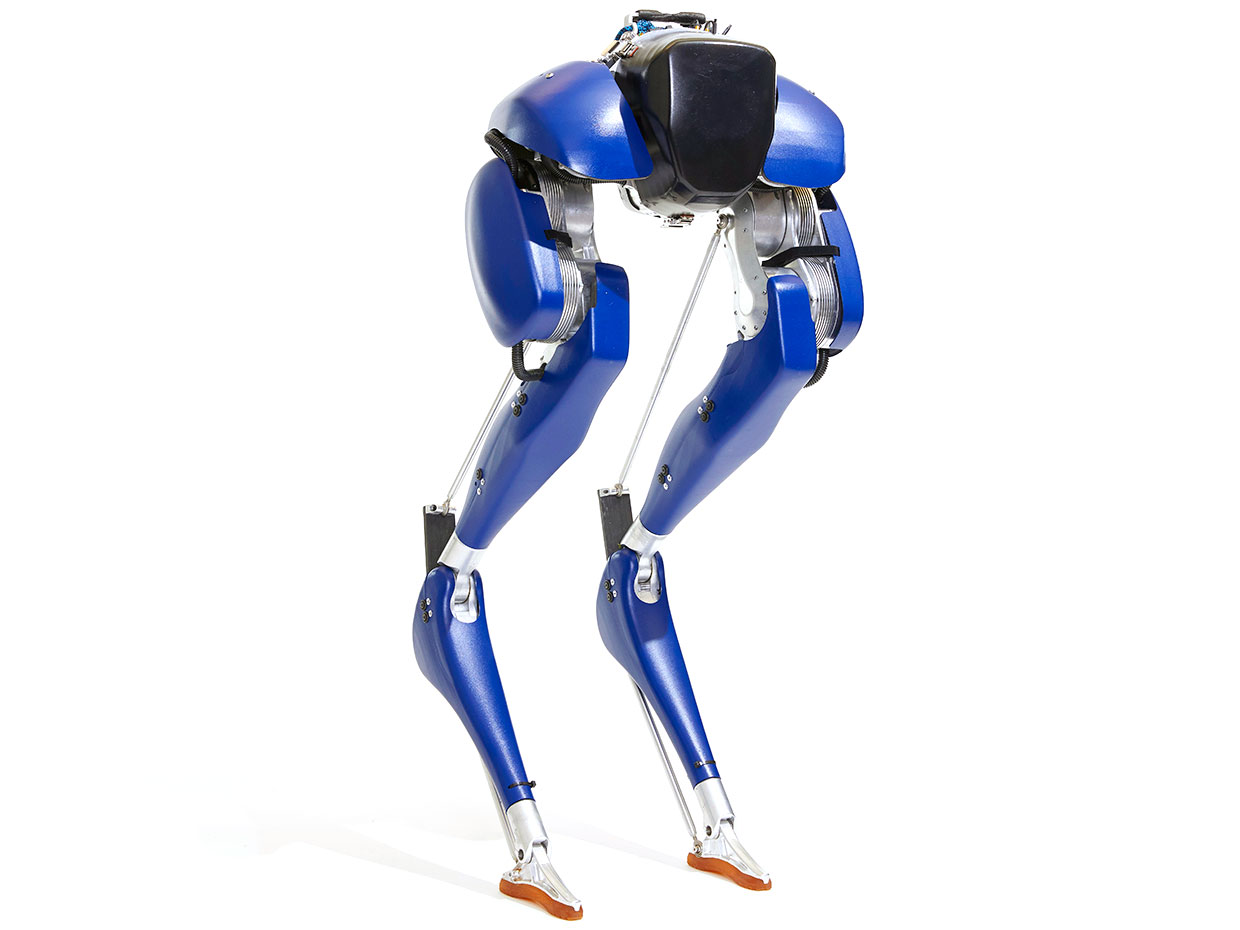 Cassie在每条腿上使用五个马达和两个弹簧,以在困难的地形上移动。
Cassie在每条腿上使用五个马达和两个弹簧,以在困难的地形上移动。像ATRIAS一样,Cassie是动态步行机器人。 我们已经优化了其设计的各个方面,以创建适合商业化的可靠且功能强大的机器人。 我们将标准设定得很高:我们希望Cassie能够穿越森林,在崎terrain的地形上行走,并依靠电池供电工作数小时而无需支撑架。
Cassie建立在与ATRIAS相同的概念上,但我们决定为她打造全新的腿。 以前,我们使用两个电机为每条腿上的每个四个链接供电。 这样的方案最大程度地减少了它们的质量,但是有一个缺点:在行走时,一台电动机会使另一台电动机减速,从而导致能量损失。 在研究Cassie时,我们
研究了其他腿部配置以消除这种影响。 新方案使您可以使电动机更小,并且机器人的效率比ATRIAS还要高。
重要的是要注意,Cassie的腿部构造是该分析的结果。 脚类似于鸵鸟
脚或其他
兽脚亚目足的事实可能表明我们处在正确的轨道上,但我们并未试图创造出一种在覆盖羽毛后可能会因in而迷失的机器人。
卡西的每条腿都有五个运动轴-或以机器人的方式说出的自由度-每个轴都有自己的电动机。 臀部具有与我们相同的三个自由度,它可以使腿向任何方向旋转。 另外两个马达的膝盖和脚部都有轴。 卡西在小腿和脚踝处拥有额外的自由度; 它们是无源的,不受电动机控制,而是连接到弹簧上,这使机器人可以在困难的地形中移动,而不受扁平足的人形生物的伤害。
Cassie的新分支需要创建比ATRIAS更复杂的低级控制器。 ATRIAS伸出了它的腿,只需施加相等的强度,并从两个电动机施加相反的转矩方向。 对于Cassie,沿某个方向移动腿需要针对不同的电动机计算不同的转矩。 为此,控制器必须考虑腿的惯性以及电动机和变速箱的动力学。
 控制器Cassie使用计划的步骤和动态平衡
控制器Cassie使用计划的步骤和动态平衡是的,控制器的任务变得更加困难,但是这种方法使您可以更有效地行走并使用更广泛的行为。 使用首批控制器之一,Cassie可以以高达5 km / h的速度行走。 功耗从100瓦(站立)到300瓦(运动)不等,并且在锂离子电池上,它可以运行5个小时。 同样,新的脚使决明子能够以ATRIAS无法做到的方式进行机动。 而且由于脚关节中的马达,它可以像ATRIAS一样无需持续移动就可以站立。
卡西也仅重31公斤,是ATRIAS的两倍。 可以在不到一分钟的时间内将两个Cassie装入汽车的后备箱。 它还更可靠:其部件由铝和碳纤维制成,保护套由耐用的塑料丙烯酸-聚氯乙烯制成,可防止碰撞和跌落。
到目前为止,Cassie还不知道如何穿越森林。 但是我们没有保险就把她开到外面,她在地上,草地和落叶上行走。 现在,我们正在研究将机器人的动态行为与
运动计划集成在一起的问题,例如,使机器人能够爬楼梯。 我们还在开发另一个使Cassie型机器人更有用的功能:手。
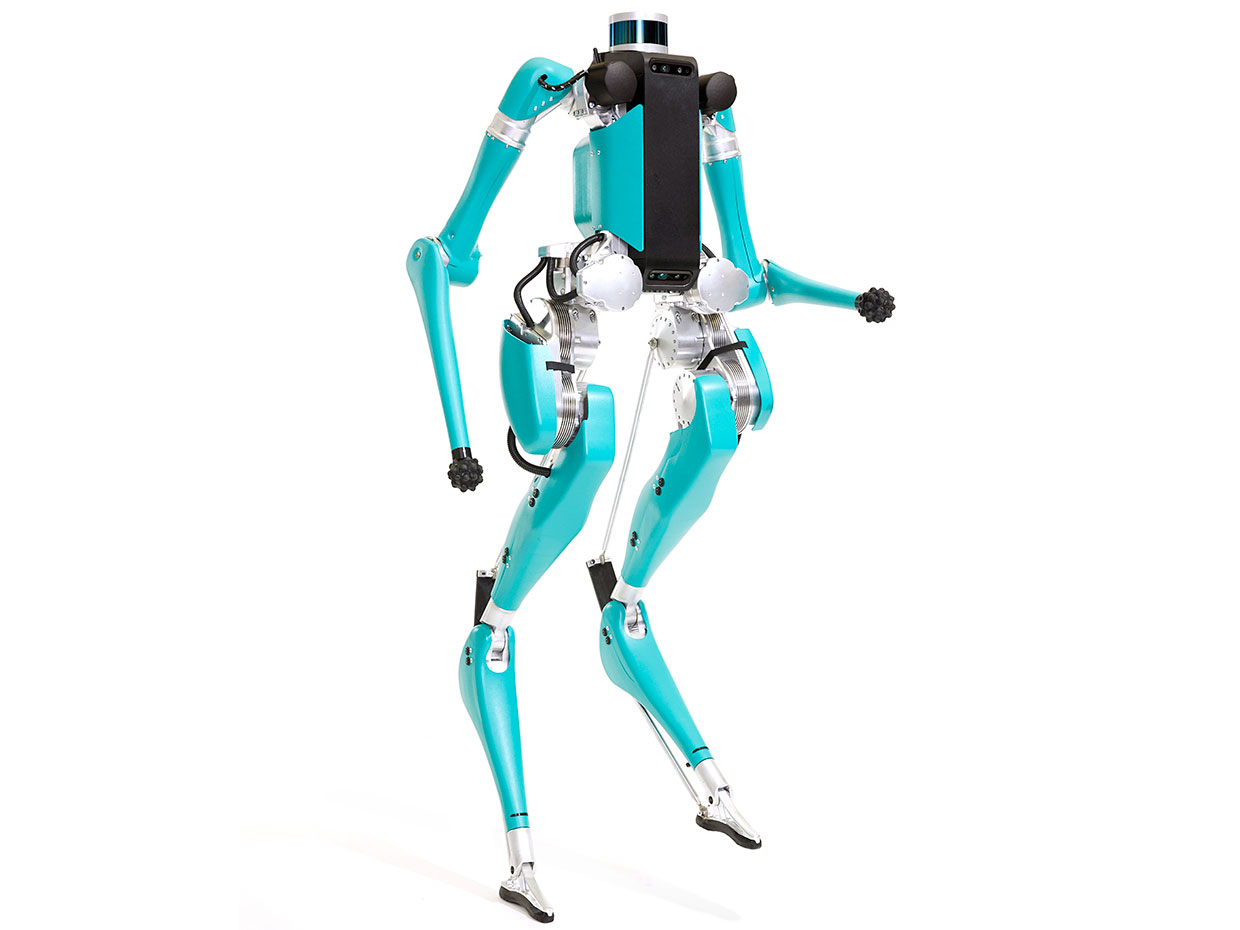 Digit像Cassie一样有腿,但是他的身体内部装有传感器,并且有两只手可以帮助他保持灵活性和平衡感。
Digit像Cassie一样有腿,但是他的身体内部装有传感器,并且有两只手可以帮助他保持灵活性和平衡感。Digit是Cassie的直接后代。 他的腿相似,但是我们增加了一个带有传感器和两只手的躯干。 它们是专门为帮助他保持活动性和平衡性而设计的,并按照步态摆动。 它们还允许Digit在秋天支撑自己并重新定向身体以站立。
Digit还有Cassie所没有的其他东西:内置感知。 我们为其添加了许多传感器,包括上身的激光雷达。 传感器帮助他收集数据,这使机器人可以在充满障碍的世界中移动,例如在杂乱的房间和台阶中,并且仅在意外情况下和传感器错误时才依靠稳定的动态。
Digit和紧随其后的腿机器人需要学习很多东西。 但是我们坚信他们将改变世界。 在改变人们的生活方式,交通方式和城市计划方面,它们的影响力可以与汽车相提并论,这些机器人有望改变物流和包裹运送方式。
在不久的将来,将出现自动驾驶汽车,像Lyft和Uber这样的提供联合出行的汽车制造商和公司将拥有自己庞大的车队来载人,和今天一样,最大客流量将在高峰时段。 但是这些车在深夜和中午做什么? 它们可能不是闲置的,而是将包裹从自动仓库运输到您的门。 但是,这些汽车只能到达人行道-没有人将包裹运送到门上是非常困难的。 然后,步行机器人开始发挥作用。 他们将乘坐此类汽车并走最后几米。 尽管轮子和机翼可以发挥某些作用,但在专为两腿设计的世界中,没有其他运动平台可以像机器人的脚那样灵活。
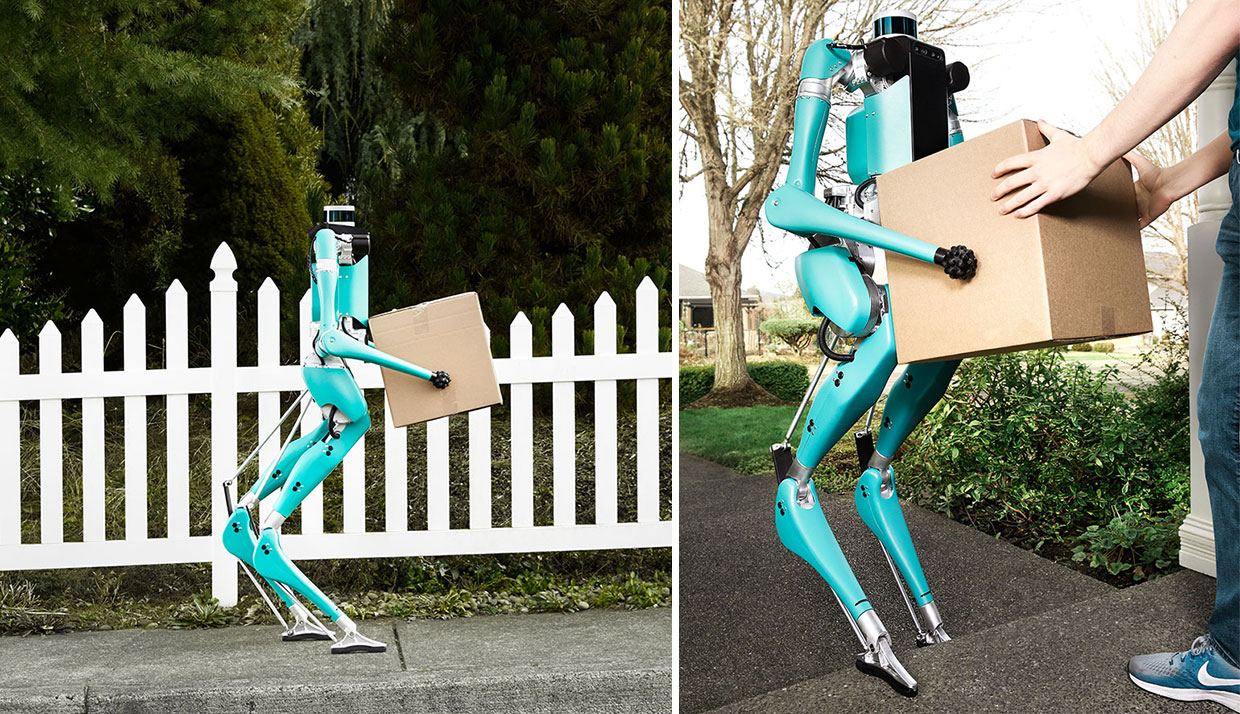 Digit学会了在不同的地形中行走并爬楼梯,因此有一天他可以将包裹直接送到门口
Digit学会了在不同的地形中行走并爬楼梯,因此有一天他可以将包裹直接送到门口运送机器人将成为日益自动化的物流系统的一部分,制造商的包裹将立即被运送到您家门口。 该系统将降低运输成本,因此与在大型,光线充足,有人工通道的仓库中购买包裹相比,运输包裹会便宜。 小型批发商店将变得不必要。 人们当然可以享受购物的乐趣。 但是日常产品将由机器人交付,从而节省了您的时间和金钱。
两足动物机器人将能够穿透我们的房屋和办公室。 他们可以走上楼,在拥挤的房间里,以人眼的安全角度与人互动,这将使我们能够在家中有足够的年龄。 他们将帮助搬运东西,并将其作为远程存在的设备,这将允许家人和朋友使用机器人来与人们进行远程交流并使他们保持联系。
脚下的机器人将能够到达危险的地方。 他们将降落为森林大火,以收集实时数据,闯入燃烧的建筑物以寻找居民,并进入诸如福岛核电站之类的灾区,探索难以到达的地区。 他们将定期检查水力发电厂和废弃矿井的内部,以便我们不必这样做。
为了进入这个未来,我们需要解决许多问题。 但是我坚信机器人技术界可以使这项技术切实可行。 对于机器人来说,这将是一小步,对全人类来说将是巨大的飞跃。