时间过得真快! '娥四号着陆模块和Yutu-2漫游车的月球另一端已经进行了第四个地球月。 这些设备在第三个月夜度过了极低的温度下幸存下来,现在它们已经退出睡眠模式,并开始对月球表面和外太空进行新的研究。
'娥四号模块和Yutu-2漫游车上安装了哪些相机,并且在长阴历时相机需要做什么?
目前,自从Yutu-2号漫游车降落在月球表面以来已经过去了88天(2212小时),并且是Yuchan-2号漫游车从Sichan航天飞机发射升空之后的115天(2760小时),这是the娥四号登月计划的一部分。
月亮远端的农历第四天:
着陆模块的计划工期为一年,流动站为三个月。
实际上,Yutu-2漫游车已达到其预计的2160小时的工作寿命。
自从2013年12月以来一直在月球可见部分的第一架Chang娥三号登陆器the娥一号登月任务,这并不是记录,但仍显示出生命迹象(遥测和各种仪器的数据),但它的合作伙伴着陆-第一辆漫游车“ Yutu”虽然在月球表面进行生产性工作40天后便失去了机动性,直到2016年中,但仍以固定模式将数据传输到了MCC。
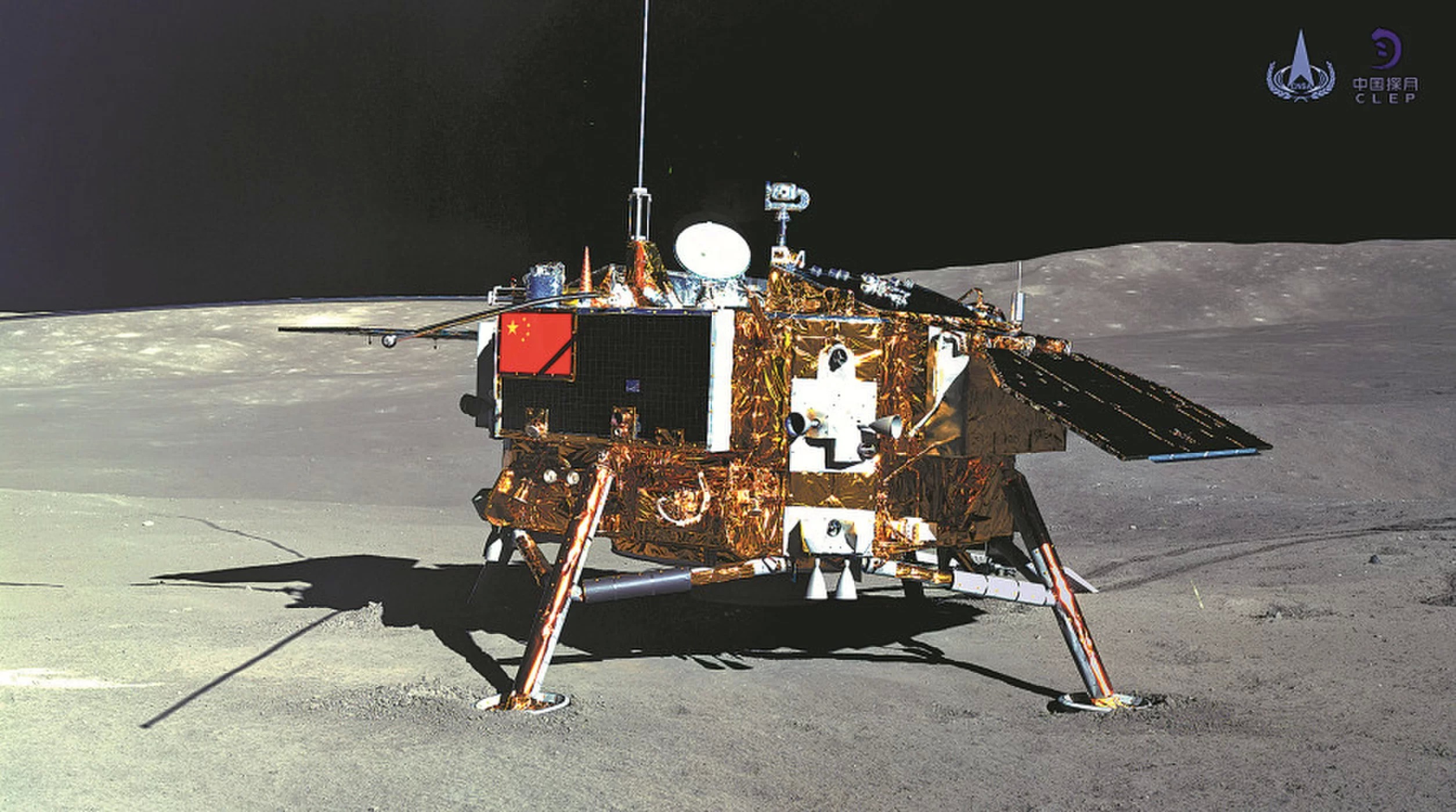
有关“ C娥四号”登月任务模块的数据:-“ Chang'e-4”下降模块(相对的着陆支架之间为4.4米,重1200公斤);
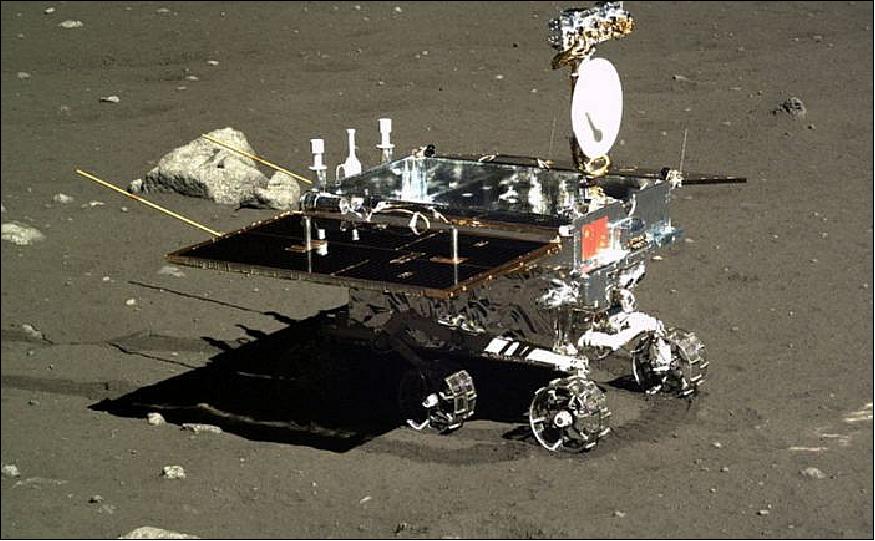
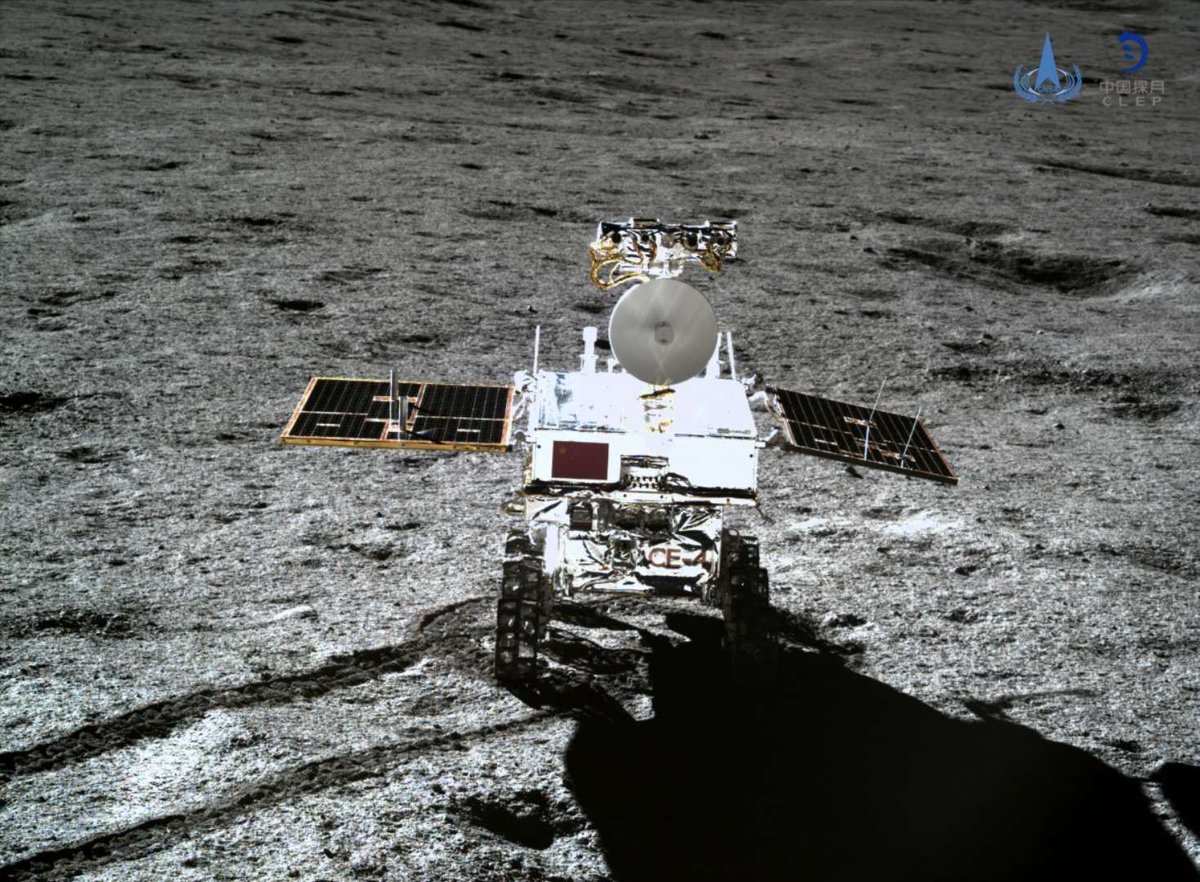
-Yutu-2漫游车(高1米,宽1米(不带太阳能电池板),长1.5米,两个折叠式太阳能电池板,六个轮子,重量140公斤。)
 月球背面的新照片
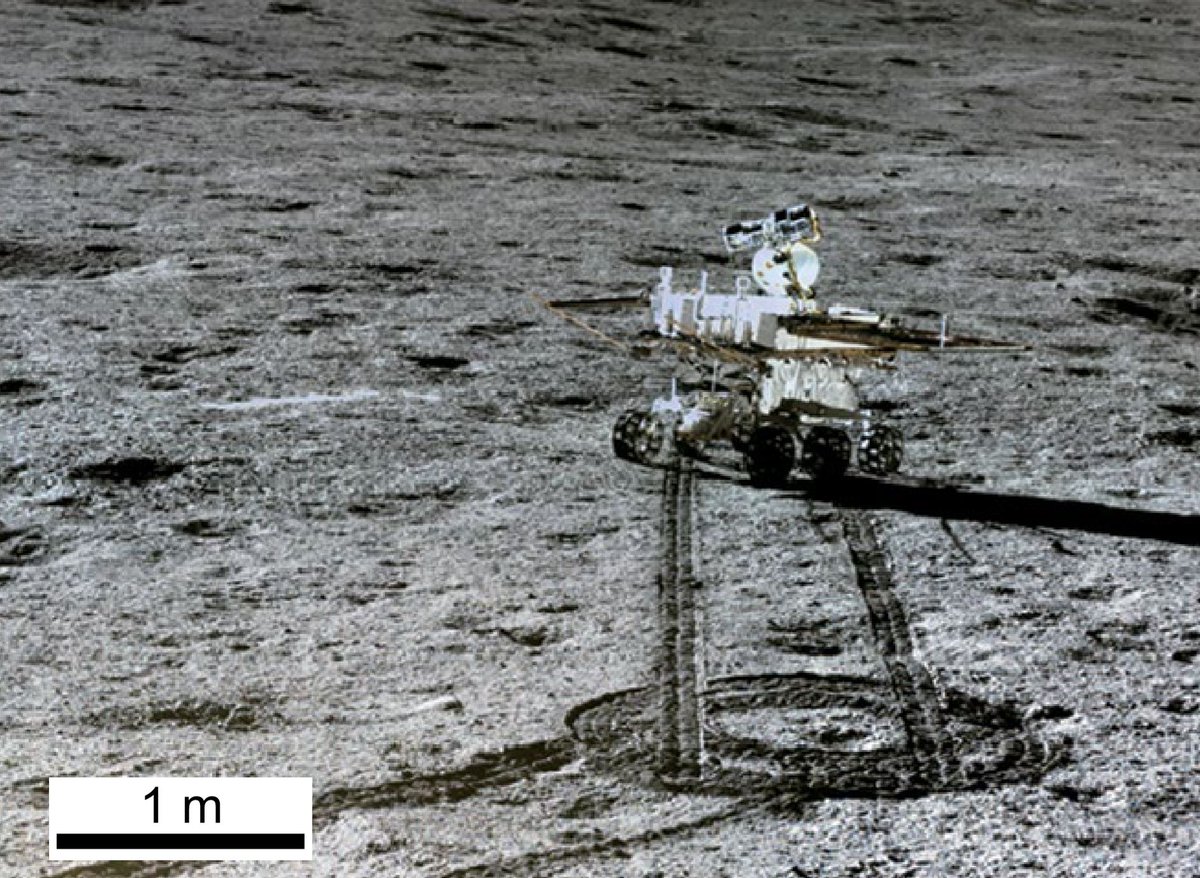
月球背面的新照片带有全景摄影机的Yutu-2漫游车车轮的月球轨迹和天线和平台的阴影:

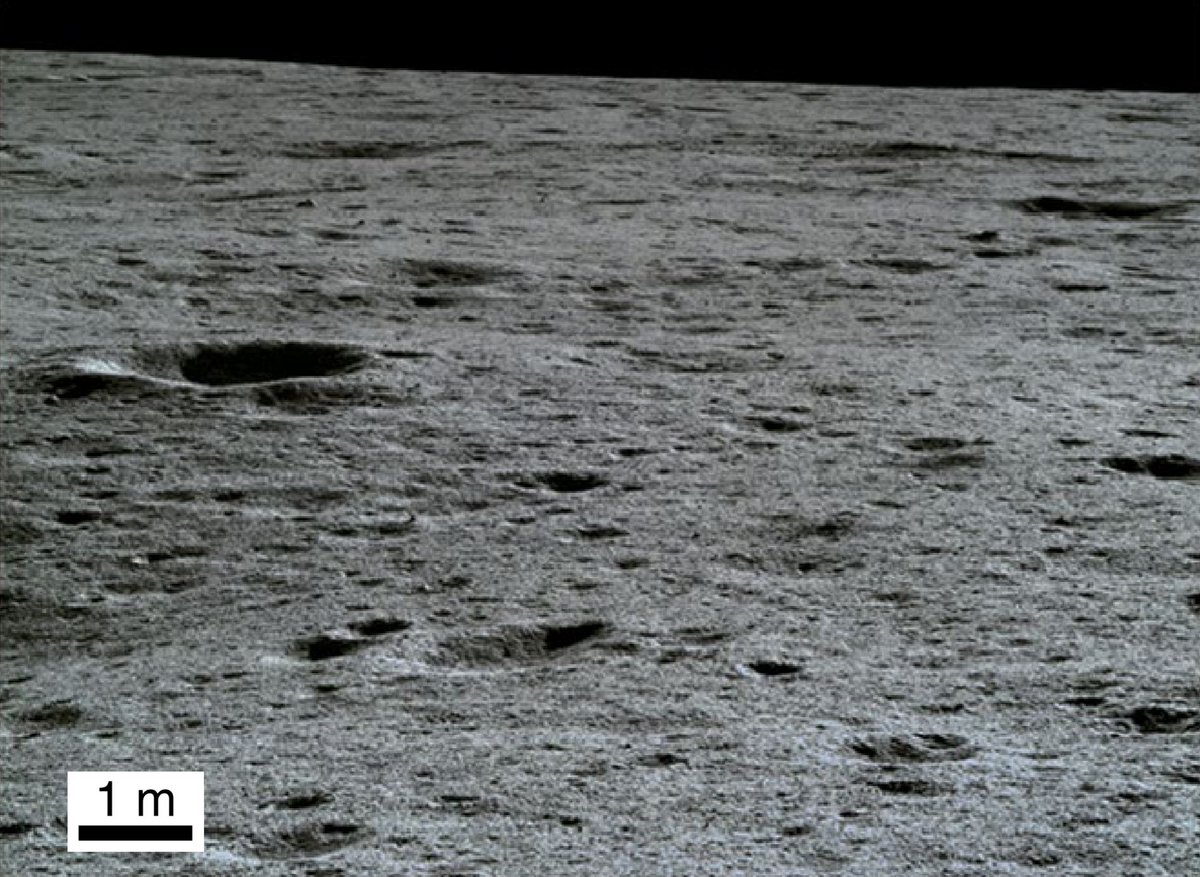
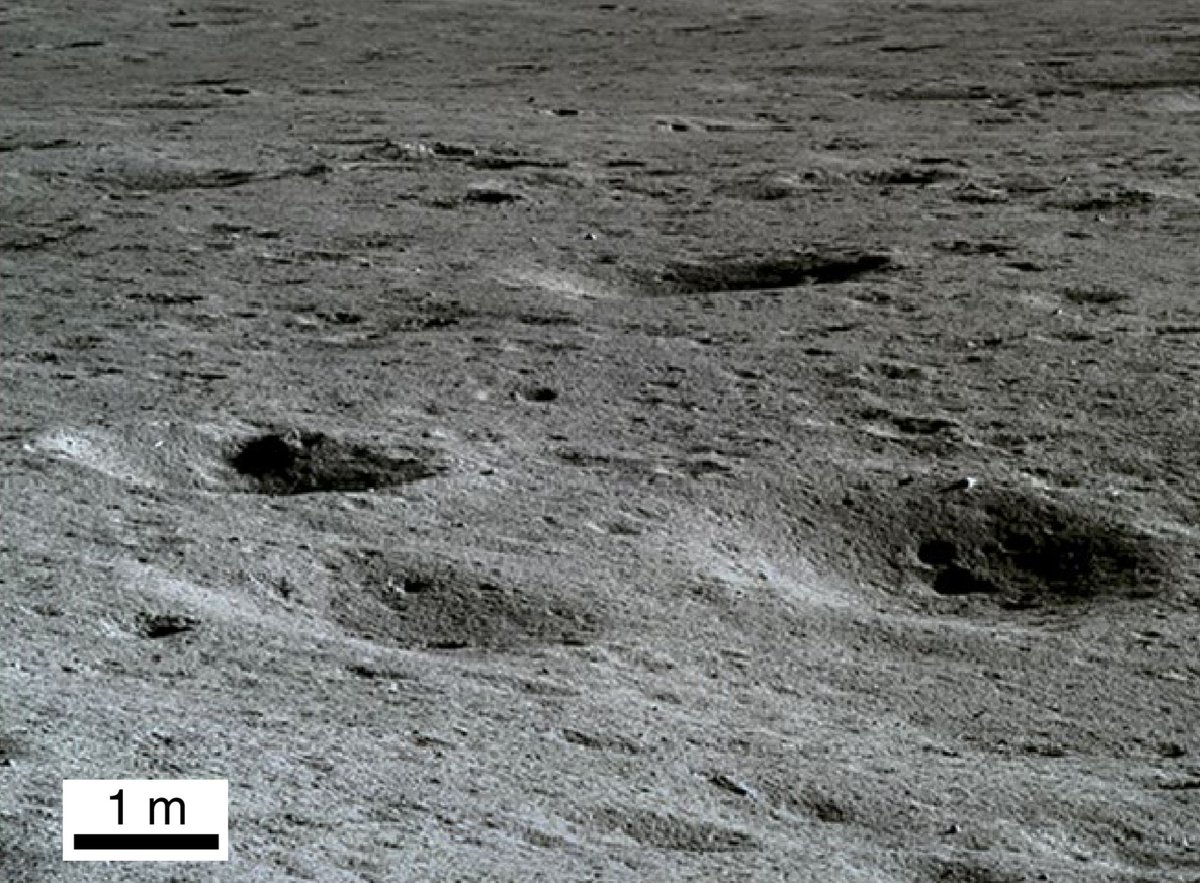
几个火山口(带有美丽的阴影)和山脉在背景中:

这些是《自然地球科学》四月号科学文章“ Chang娥四号将探索的月球远端”的照片。

着陆点附近的小环形山:
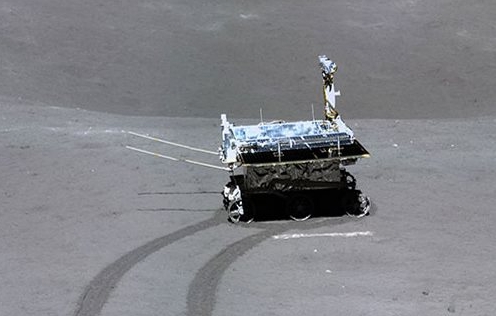
漫游者“玉图2号”探索月球表面:
小陨石坑中的石头碎片(来自Yutu-2漫游者的照片):
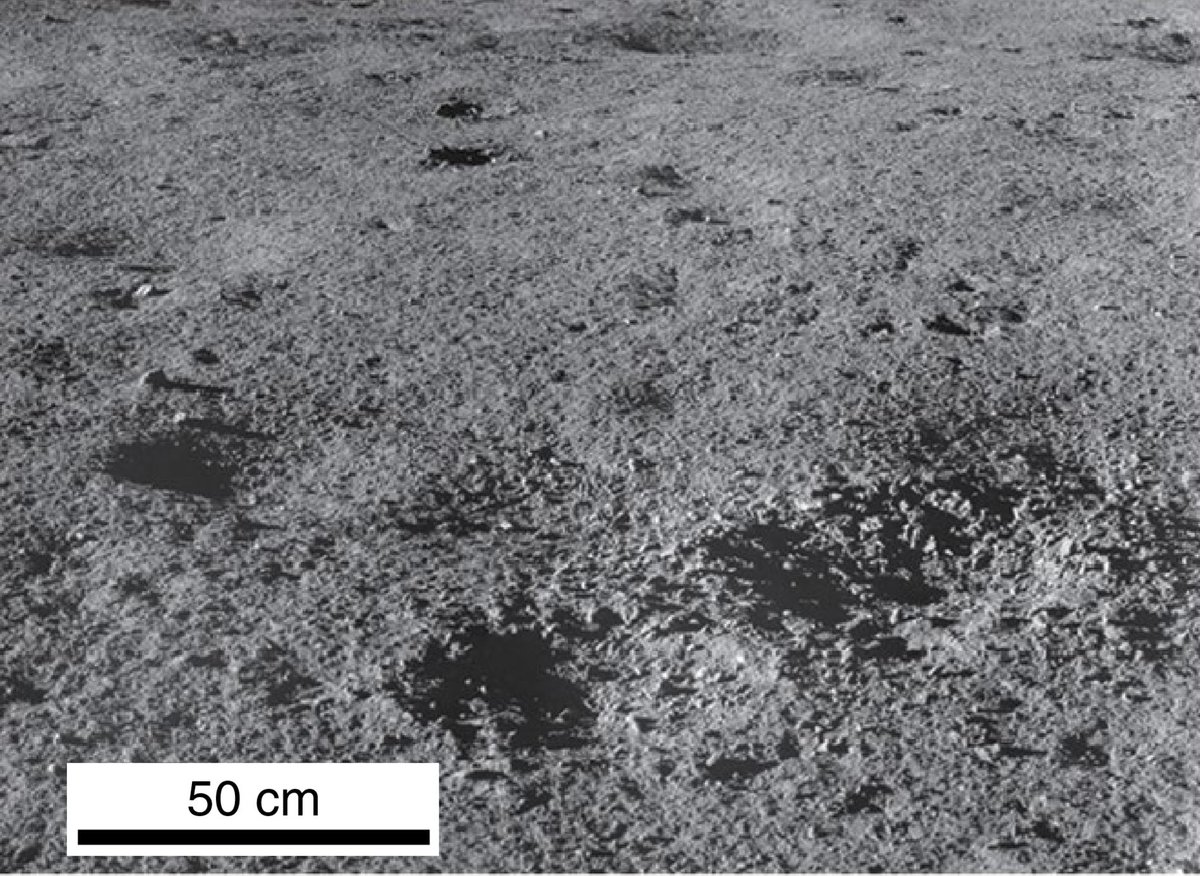
Yutu-2漫游车上的小石头:

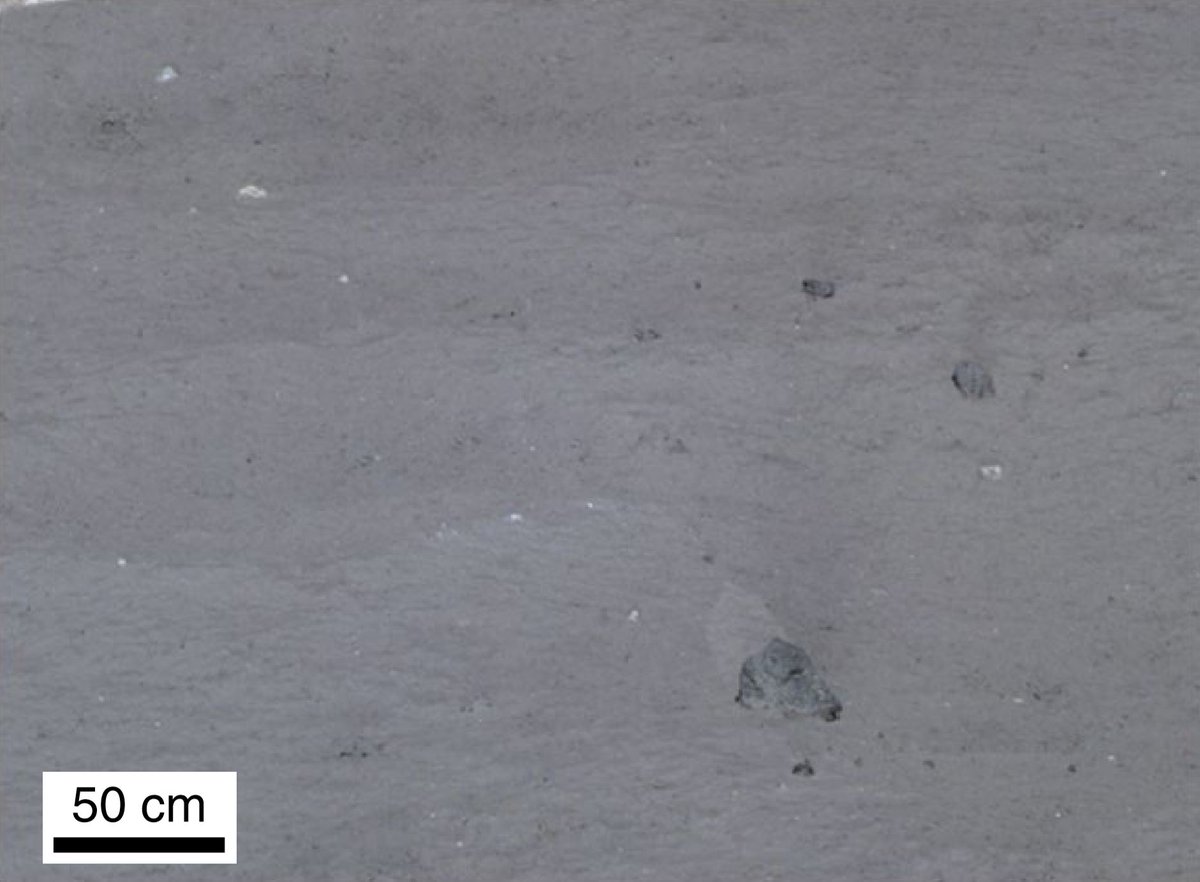
着陆点附近非常不寻常的黑石头:
 '娥四号模块和Yutu-2流动站上安装了哪些相机?'娥四号着陆模块上安装了两个摄像头:
'娥四号模块和Yutu-2流动站上安装了哪些相机?'娥四号着陆模块上安装了两个摄像头:
-降落相机(降落相机-LCAM);
-风景相机(地形相机-TCAM)。LCAM着陆相机(0.5 kg,尺寸116x100x70.4 mm)安装在Chang'e-4模块的底部,在月球表面上方12 km的高度自动打开,以1024x1024像素的分辨率记录着陆过程,每秒10帧。
来自LCAM相机的着陆过程视频-在一个视频中收集了数千帧
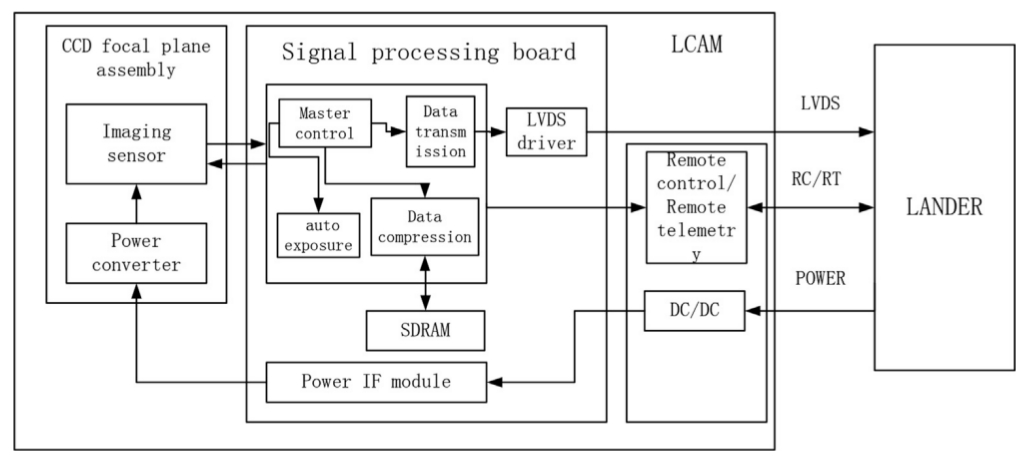
LCAM着陆舱特点:
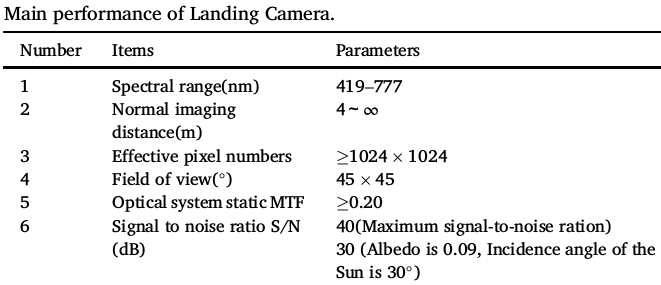
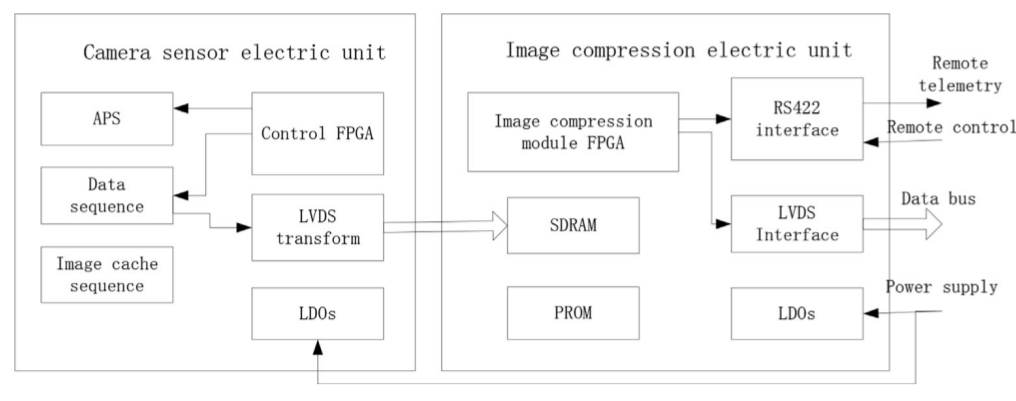
LCAM着陆舱元件的电路图:
使用LVDS(低压差分信号)接口传输数据。
在登陆月球后,LCAM相机仅捕获与着陆支架相同的帧:

TCAM风景相机(0.64千克,尺寸92x105x118.9毫米)安装在the娥四号着陆模块的最高点上的特殊支架上,该支架可使相机围绕其轴旋转360度,并且可以将相机向上或向下倾斜至最大120度度。 TCAM功能是对着陆模块的表面和元素进行全景照片,跟踪流动站并探索着陆区域周围的区域。
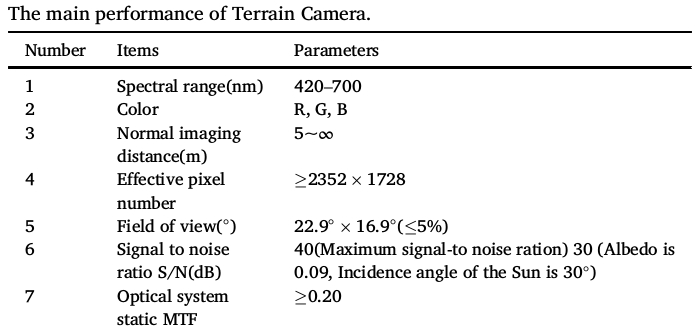
TCAM风景摄像机的功能:
景观摄像机TCAM各要素的通信方案:
登陆点全景图:

着陆模块上的LCAM和TCAM摄像机:

'娥四号着陆模块以固定模式运行,其着陆区中的表面照片对于理解模块周围实际上有哪些类型的表面而言非常重要。 毕竟,有大量的小陨石坑和石头,它们会干扰(在最坏的情况下)降低流动站的程序。 由于着陆后,the娥四号模块无法更改其位置,无法“跳”到另一个较容易着陆的区域。
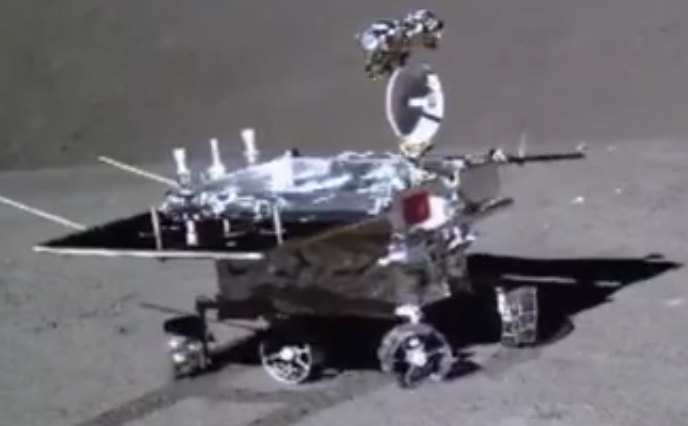
Yutu-2流浪者具有双全景相机(全景相机-PCAM)。全景PCAM相机(0.69千克,尺寸90x110x120毫米)安装在Yutu-2漫游车的最高点上的特殊宽桅杆支架上,该支架可使相机围绕其轴旋转360度,以进行表面全景的照片捕捉。
由于相机由两个相同的模块组成,因此它们用于使用双目立体成像方法合成3D图像。 为了在PCAM摄像机中获得彩色图像,使用了拜耳滤镜(滤色镜阵列)。
全景PCAM相机的功能:
全景PCAM摄像机的要素通信方案:

Yutu-2漫游车表面全景的总体视图:

流动站上的PCAM摄像头:

2019年1月3日,在成功完成着陆程序的所有阶段以及使用devices娥四号设备(着陆模块和流动站)安装独立通信通道的所有步骤完成之后,开始研究月球远端的照片的时代开始了。
相机拍摄的照片:Yutu-2漫游车是Chang'e-4着陆模块的移动式高生产率太空合作伙伴。
Yutu-2漫游车沿着月球另一侧的复杂表面行驶了160多米。
农历三日的Yutu-2流浪者之路:


有趣的是,Yutu-2漫游车在转向时前轮如何工作:
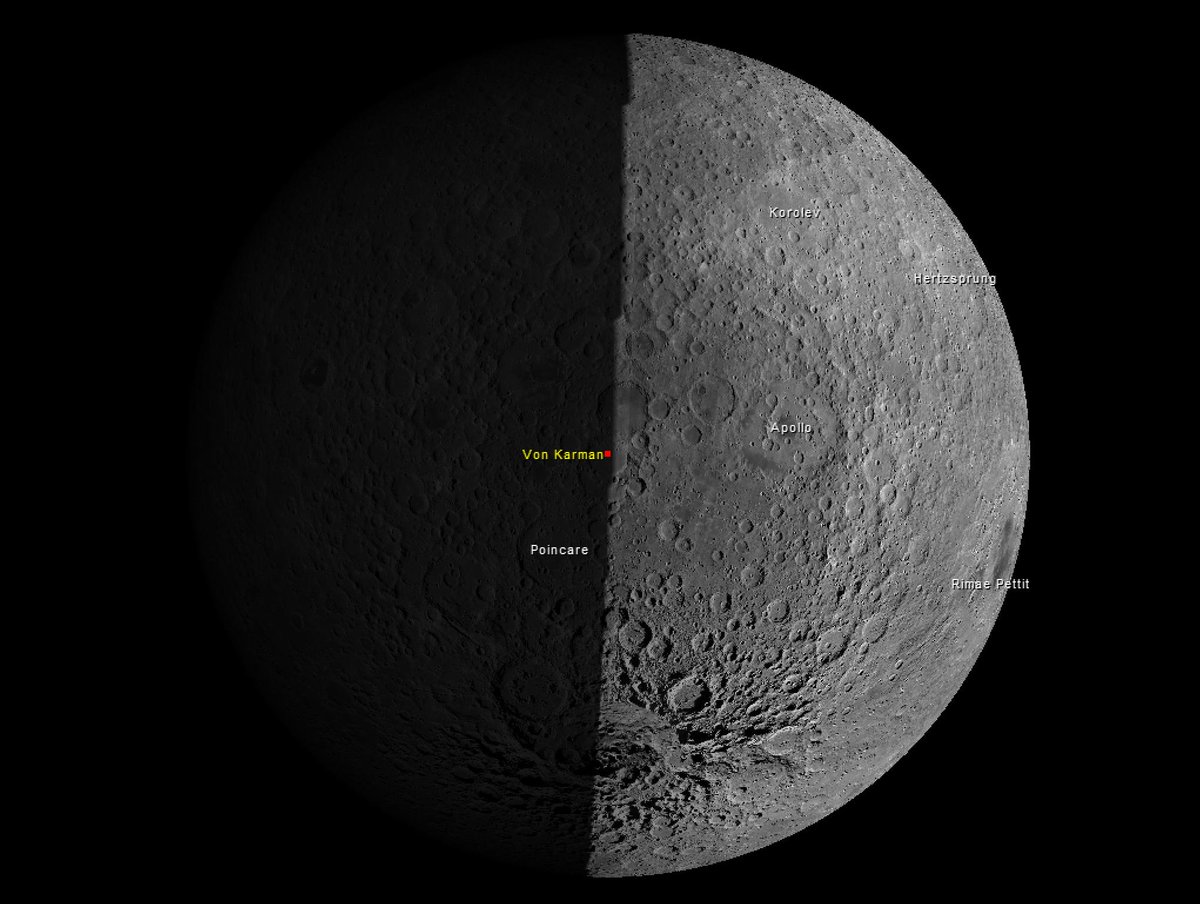
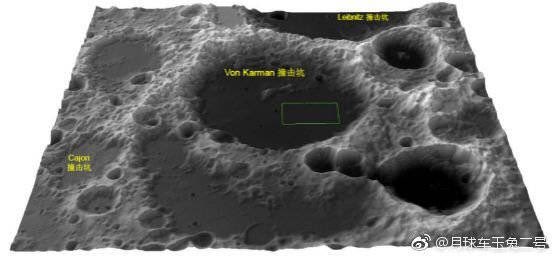
 e娥四号任务的着陆点:
e娥四号任务的着陆点: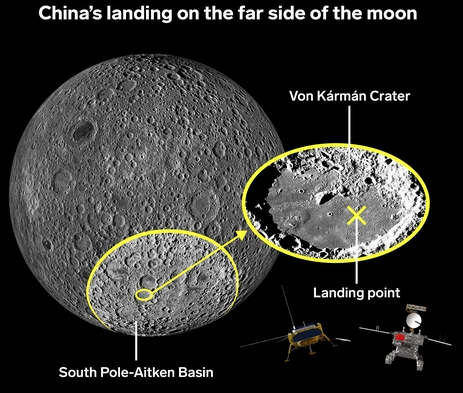
由于月球的反面还具有比从地球可见的另一面更复杂的浮雕,因此,Yutu-2漫游车在沿地表运动的过程中遇到了比以前的漫游车更严重的电机问题和干扰。 “ Yutu”,于2013年12月发送到月球表面。
不幸的是,2014年1月25日,of娥三号任务的第一辆雨图漫游车在复杂的月球表面上克服了114.8米后,在技术上被固定下来(由于碰撞而导致元件失效)。
'娥四号着陆舱着陆区的月球表面充满了褶皱,无数的鹅卵石和小火山口,每经过一次微小的运动,Yutu-2漫游车就应停下来拍摄周围的表面,并将这些数据通过卫星发送回地球中继器。
然后,MCC的科学家,操作员和地球上的工程师将处理这些数据,并绘制出Yutu-2流浪者将遵循的另一条路线。
必须配置Yutu-2流动站天线,使其指向直放站卫星以正确发送和接收控制信号,同时,流动站的太阳能电池板应最佳倾斜,以接收大量阳光,以最大程度地提高输出功率数据传输时用电。
 六轮流浪者“雨图2”:
六轮流浪者“雨图2”:- 流动站的总重量约为140千克(310磅);
- 负载能力约20公斤(44磅);
- 可以在斜坡上移动并具有自动传感器以防止与其他物体碰撞;
- 流动站通过两个太阳能电池板供电,使流动站在农历期间可以工作;
- 最高时速为每小时200米(仍然无法达到月球上的速度-因为表面上的元素将不允许提速并损坏流动站);
- 最大研究面积为3平方米。 km;
- 预计工作时间-3个月(2160小时);
- 最大估计距离-10 km。
Yutu-2漫游车的车轮元素确实是其复杂的设计功能,在设计阶段,中国航天技术学院的工程师必须对其进行进一步开发。 他们拒绝使用这些轨道,因为事实证明它们在测试中难以维护且容易受到攻击。
例如,如果一块小石头进入跟踪机构,则流动站可能会卡住并失去跟踪。 与更可靠,资源更多的轮式实施相反,它还可以安全地将石块移动到20厘米高。

但是,如果Yutu-2流浪者翻身,它将无法再次返回其工作位置。 月球车侧面的太阳能电池板非常易碎,跌落后会破裂或变成灰尘,这将使它们无法使用。

因此,在对漫游车进行远程控制的过程中,必须集中精力最大程度地保持Yutu-2漫游车的位置在稳定状态,并且在沿地面移动时不让其掉落。
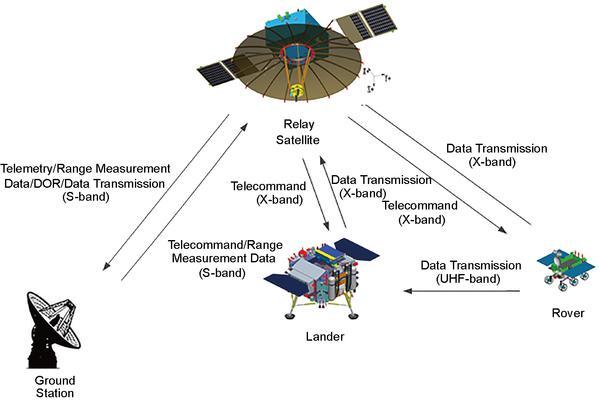
但是如何控制Chang娥四号着陆模块和Yutu-2漫游车上的所有这些摄像机,传输数据并接收电源?关于着陆模块和流动站的车载控制器和电源系统。'娥四号着陆模块和Yutu-2流动站在其板上配备了特殊的有效载荷控制器,用于接收,存储和控制来自不同模块和设备元件的科学数据。
此外,使用RS-422(遥测和控制)和LVDS(科学数据)接口的控制信号,科学和照片数据被传输到着陆模块和流动站的中央控制器,它们通过通信系统将它们通过卫星传输到地球上的MCC直放站“ Tseyuqiao”。
'娥四号着陆模块和Yutu-2漫游车的有效载荷控制器配备了中央处理器和FPGA阵列。
同样,借助有效负载控制器元件,将车载电压+ 28V转换为用于二次电源的电压+ 5V,+ -15V,+ 3.3V,并持续监视控制器模块和外部设备的电压和温度值。
作为微处理器,使用了以下各项:ATMEL AT697F(Rad-Hard 32位SPARC V8处理器)。
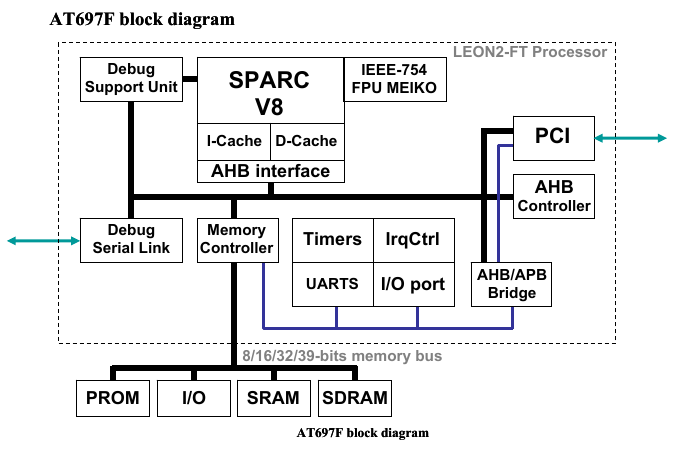
作为可编程逻辑集成电路(FPGA),使用:六个XILINX XQR2V3000-4CCG717(防辐射QPro Virtex-II FPGA)的阵列。
为了进一步保护微电路免于辐射,使用了厚度至少为3.8 mm的铝屏蔽。
'娥四号着陆模块上设备的通信和数据传输方案: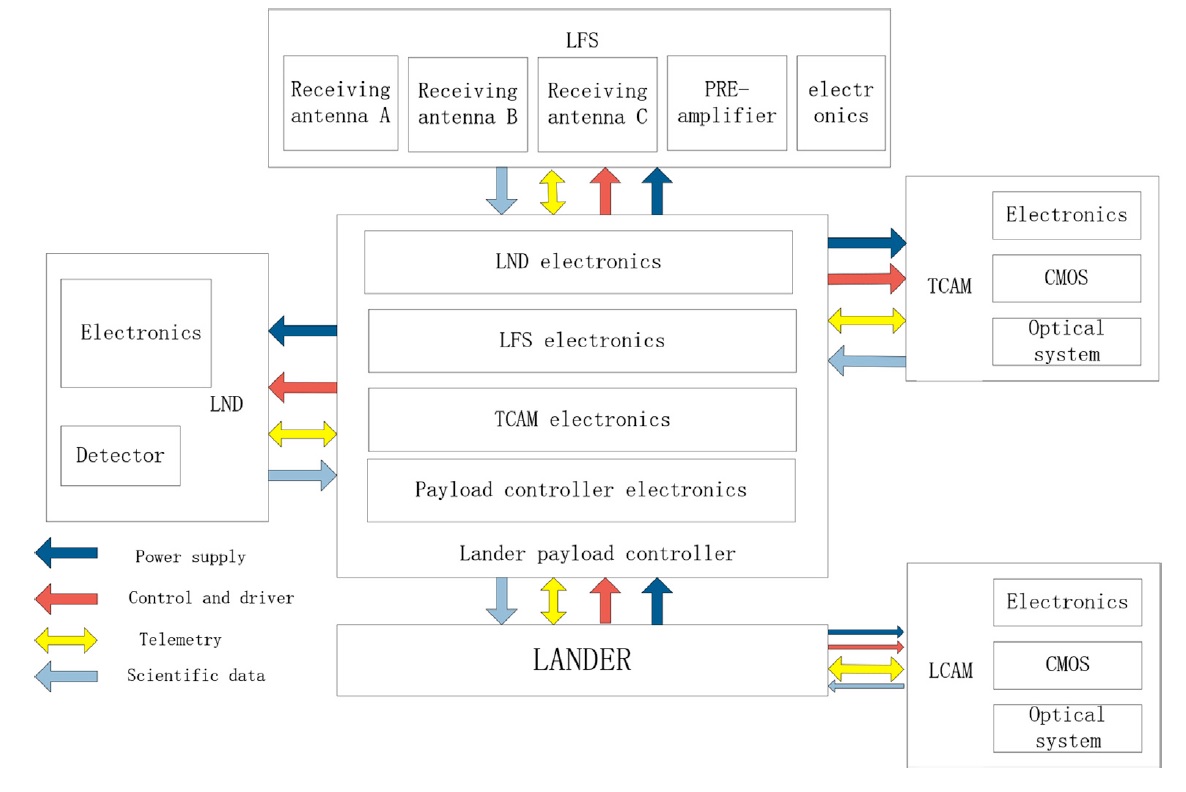
其中:
-LFS-低频光谱仪;
-LND-月球着陆器中子学和剂量学;
-TCAM-地形相机;
-LCAM-着陆相机。
Yutu-2流动站上设备的通信和数据传输方案: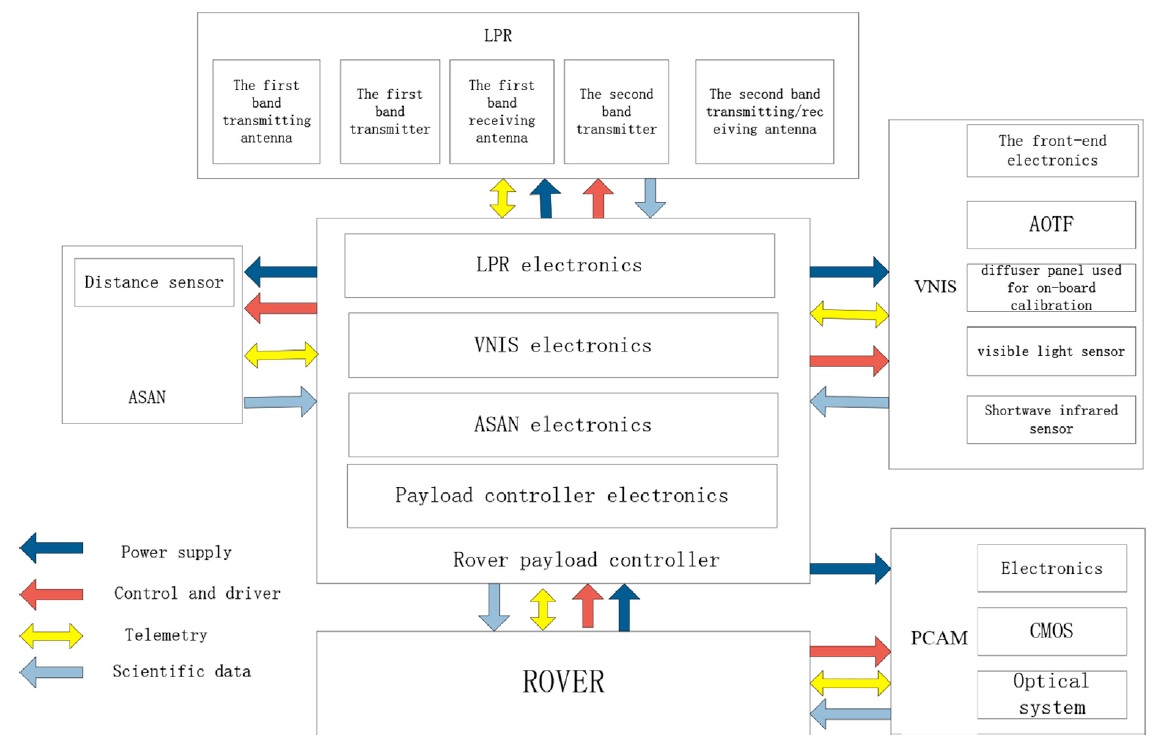
其中:
-LPR-月球穿透雷达;
-ASAN-先进的中性小型分析仪;
-VNIS-可见和近红外成像光谱仪;
-PCAM-全景相机。
顺便说一句,在较早的出版物中,我已经谈到了
发射舱和
流动站的几乎所有科学设备,只有一个科学设备保持隐身状态-LPR(月球穿透雷达),可以从外部看到,就像流动站后面的两个“天线”一样。
我将尝试将这个有趣的设备写成单独的出版物。