
在机器人世界中,一个很长时间以来一直在成功开发软件框架,该软件框架使您能够快速原型化机器人系统-机器人操作系统(ROS)。 Sberbank机器人实验室的我们正在积极地将其用于自己的项目开发中。 积累了一些经验并注意到在俄罗斯还没有举行过一次有关ROS的实践会议,我们决定组织它并共享我们的知识,同时结识机器人社区。 ROS Russian Meetup 2019将作为4月16日在Skolkovo的Skolkovo Robotics 2019论坛的一部分举行,这是ROS开发人员和各个级别的机器人有机会致力于有一天与社区进行现场经验交流的机会。 如果您熟悉ROS,则可以放心地进入
注册表格 ,程序和组织信息也位于此处。 在会议上,我们将讨论ROS的历史和社区原则,将大量时间用于SLAM和室内激光激光雷达导航的实用报告以及机器人路径规划器。 我们将展示如何通过ROS控制工业机械手,如何使用传感器数据以及如何与SMACH状态机一起使用。 我们甚至会告诉您如何轻松安装ROS并开始开发机器人。
顺便说一句,参加会议是免费的,但是由于席位数量有限,我们请您等待确认。 对于那些不熟悉ROS的人,我们提供了一个小概述。
 通过ROS眼看世界的二维视图
通过ROS眼看世界的二维视图机器人操作系统是用于机器人的软件框架,该框架实现用于构建复杂机器人的基本算法。 它包括一组工具,库和标准,旨在简化在各种机器人平台上创建复杂且可靠的机器人行为的任务。
该项目的主要思想是开源原理,程序包文档,代码重用和全球机器人技术。
为什么创建
创建真正可靠的通用机器人软件非常困难。 从机器人的角度来看,对人而言微不足道的问题导致开发人员对机器人系统进行编程的高度复杂性。 处理这些任务非常困难,以至于有时无法单独或以小组形式解决。
结果,从头开始创建了ROS,以刺激机器人技术的协作软件开发。 例如,一个实验室可能有室内SLAM专家,并可能提供世界一流的SLAM系统。 另一个小组可以有使用SLAM进行导航的专家,另一个小组可以开发一种计算机视觉方法,该方法可以很好地识别杂乱环境中的小物体。 ROS是专门为此类小组设计的,它们可以相互协作并相互借鉴。
背景短
ROS是一个具有悠久历史和大量参与者的大型项目。 机器人研究界的许多人都需要开放式协作系统,为此目的创建了许多项目。
在2000年代中期,斯坦福大学做出了与在机器人技术中使用AI相关的各种努力,例如,斯坦福AI机器人(STAIR)程序和个人机器人(PR)程序,用于创建旨在用于机器人技术的动态软件系统的自定义原型。 。 在2007年,Willow Garage提供了大量资源来进一步扩展这些概念并创建原型。 这些努力得到了无数研究人员的支持,他们分享了他们的时间和经验,为ROS的基本思想和主要软件包做出了贡献。 所有软件都是使用BSD开源许可证开发的,并逐渐成为机器人研究人员社区中广泛使用的平台。
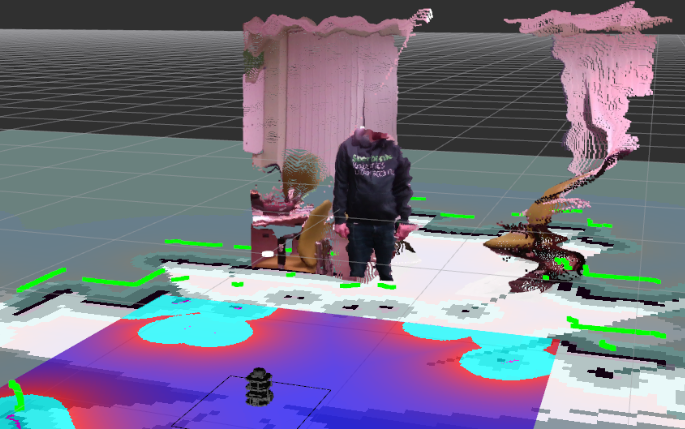 ROS眼中的三维世界观
ROS眼中的三维世界观
全球ROS社区
从一开始,ROS就在多个机构和多个机器人中开发,包括许多从Willow Garage接收PR2机器人的机构。 尽管使所有参与者将代码托管在同一服务器上要容易得多,但是随着时间的流逝,“联合”模型已成为ROS生态系统的优势之一。 任何小组都可以在自己的服务器上运行自己的ROS代码存储库,他们完全拥有并控制它。 他们不需要任何人的许可。 如果他们决定公开其存储库,则可以像成就所有开源项目一样,获得其应得的社区的认可,并从测试人员和改进建议中受益。
在过去的几年中,ROS不断发展壮大,现在包括世界各地的庞大用户社区。 从历史上看,大多数用户都在研究实验室中,但是他们越来越多地出现在商业领域,尤其是在工业和服务机器人领域。
ROS社区非常活跃,在discourse.ros.org上有3000多个成员,联合文档Wiki上有8000多个用户,并且在站点上有大约22,500个用户来回答ROS问题。 Wikipedia包含22,000多个页面,每天的编辑速度约为30个。
根据ROS Metrics Report 2018,目前讲俄语的ROS用户数量在其他国家中排名第15。让我们见面,讨论和解决它。 您还可以了解项目的ROS功能以及开发机器人的实际方法。
要作为听众参加,请填写
表格 。
如果您对社区有一个有趣的信息,
您仍然
可以成为演讲者 。
程序: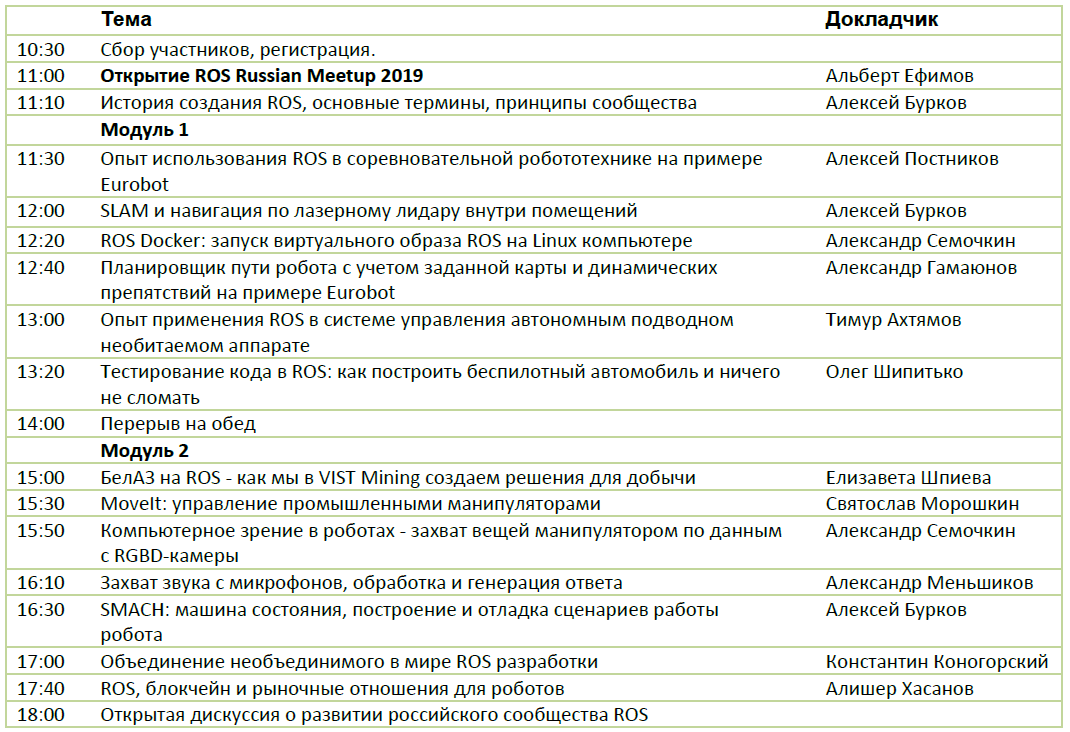
该活动由Sberbank机器人实验室组织。