
去年,我在发现Aquastorozh泄漏时购买了用于紧急关闭起重机的设备。 很长一段时间我无法忍受。 有一个想法将其集成到Z-Wave网络中并获得gidrolock模拟,但需要电池。 终于,手伸到...
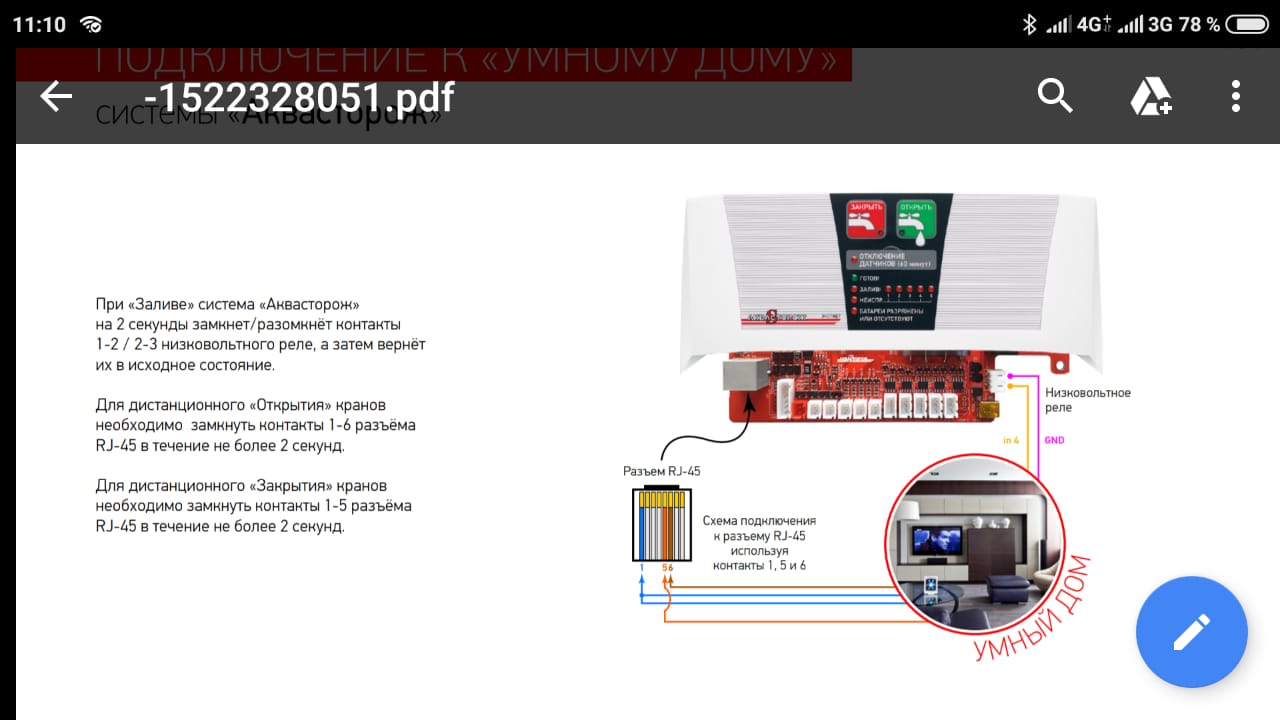
Aquastorozh是带有插入式水龙头和泄漏传感器的底座。 该组合系统既可以通过适配器的220 V网络工作,也可以通过电池工作。 开发人员提供了连接到“智能家居”系统的功能。 通过关闭以太网插座中的一对触点,您可以打开分接头,而另一对则将它们闭合。 检测到泄漏时,继电器触点闭合1秒钟。 板上有一个非焊接的UART连接器,但是在本文中,我将讨论记录功能的实现。
开发任务
- 远程开/关水龙头。
- 泄漏信息。
- 两个水表。
- 不要中断“ Aquastorozh”的工作。
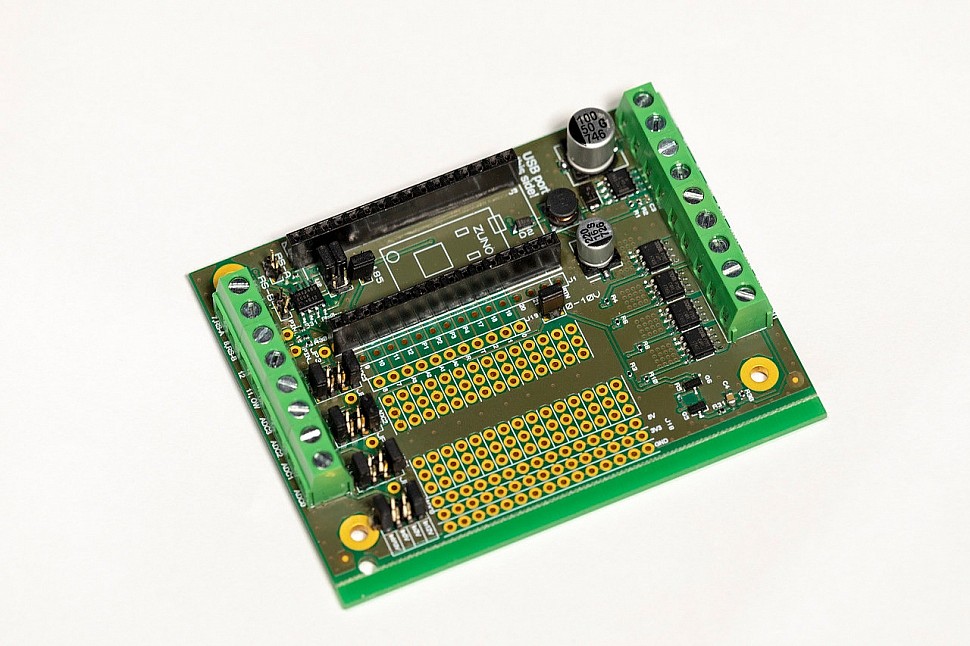
决定在ZUNo盾牌的基础上做。 它在带有压力密封的密封外壳中提供,板上有接线端子,并具有用于安装电池和其他电子组件的自由空间。 Arduino是类似的。
以太网连接器
可闭合导线之一是“水上看守人”的“地球”。 您可以结合使用ZUNo和Aqua-Watch的平台,并直接通过GPIO ZUNo控制起重机。 所以我做到了。 但是,如果ZUNo发生故障(例如,电池已用完),“ Aquastorozh”控制线将收到“零”信号,并开始循环重启。 这种连接方式极大地影响了整个系统的可靠性,因此,在电路稍微复杂的情况下,我切换到两个簧片继电器,这与Aquastorozh进行了电流隔离。 继电器导通时消耗约7 mA的电流。 要切换起重机,您需要打开一个继电器一秒钟,这完全可以接受。 电池电量足以进行数千次切换。 (现在我手里有电磁脉冲单线圈继电器。要切换它们,您需要施加一个1 ms的脉冲,这样能效更高。但是要控制该继电器,您需要4个晶体管和两个输入/输出脚)。
睡在Z波中
我将简要介绍Z-Wave设备的睡眠方式以及由此带来的问题。
Z波设备可能处于休眠状态或经常醒来。 睡眠设备是最节能的,但是无法发送命令(在我的情况下,是要切换起重机)。 第二种适合我。 FLiRS设备-经常收听路由从站。 配置为这种操作模式的设备每秒钟唤醒一次,如果在很短的时间内没有收到来自控制器的完全唤醒信号,它将进入睡眠状态。 例如:我发送命令打开起重机。 控制器了解到我的设备经常在监听,并在一秒钟内发出特殊的短唤醒光束,以便网络上的所有FLIRS设备都被唤醒。 一旦我的设备接受了这个数据包,它就会发送一个报告,表明它已经唤醒并准备接受命令。 获取关闭水龙头的命令。 再次入睡。 因此,每当设备受到控制时。 缺点是该设备在控制器广播的开始时和开始时都可以接收唤醒束。 控制器将其发送大约一秒钟。 在最坏的情况下,设备会在本新闻通讯的开头唤醒,并会等待将近一秒钟,直到命令到达。 但是由于通常不需要打开和关闭水龙头,因此这并不是一个严重的缺点。
实作
ZUNo Shield有一个小的面包板,您可以在上面放置必要的组件。
该电路包含两个继电器和两个晶体管进行控制。 一个简单的小草图。

关于能耗的几句话。
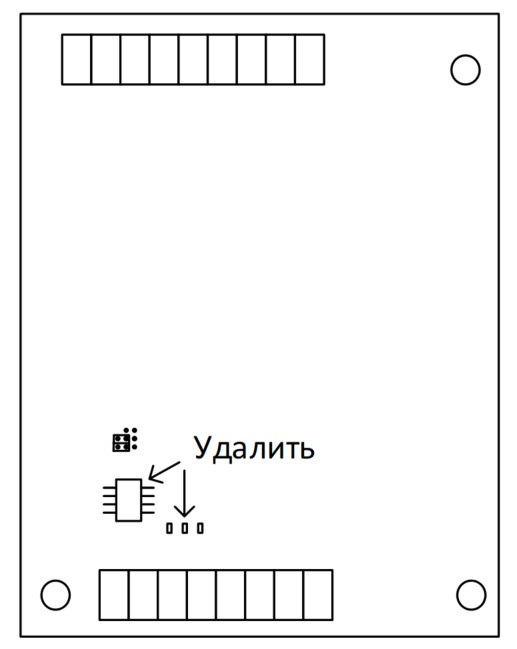
ZUNo屏蔽板包含一个用于RS-485协议的驱动器芯片和一个用于单线协议的底部模块上的引脚“ 11”的上拉电阻。 删除这些组件后,主要消费者仍然是ZUNo。
睡眠模式下的功耗约为5-10μA,活动模式下的功耗高达60 mA(继电器处于活动状态,ZUNa正在发送)。
不同工作模式下的电流消耗波形图
当前轴的方向是从上到下。
设备正在等待命令:
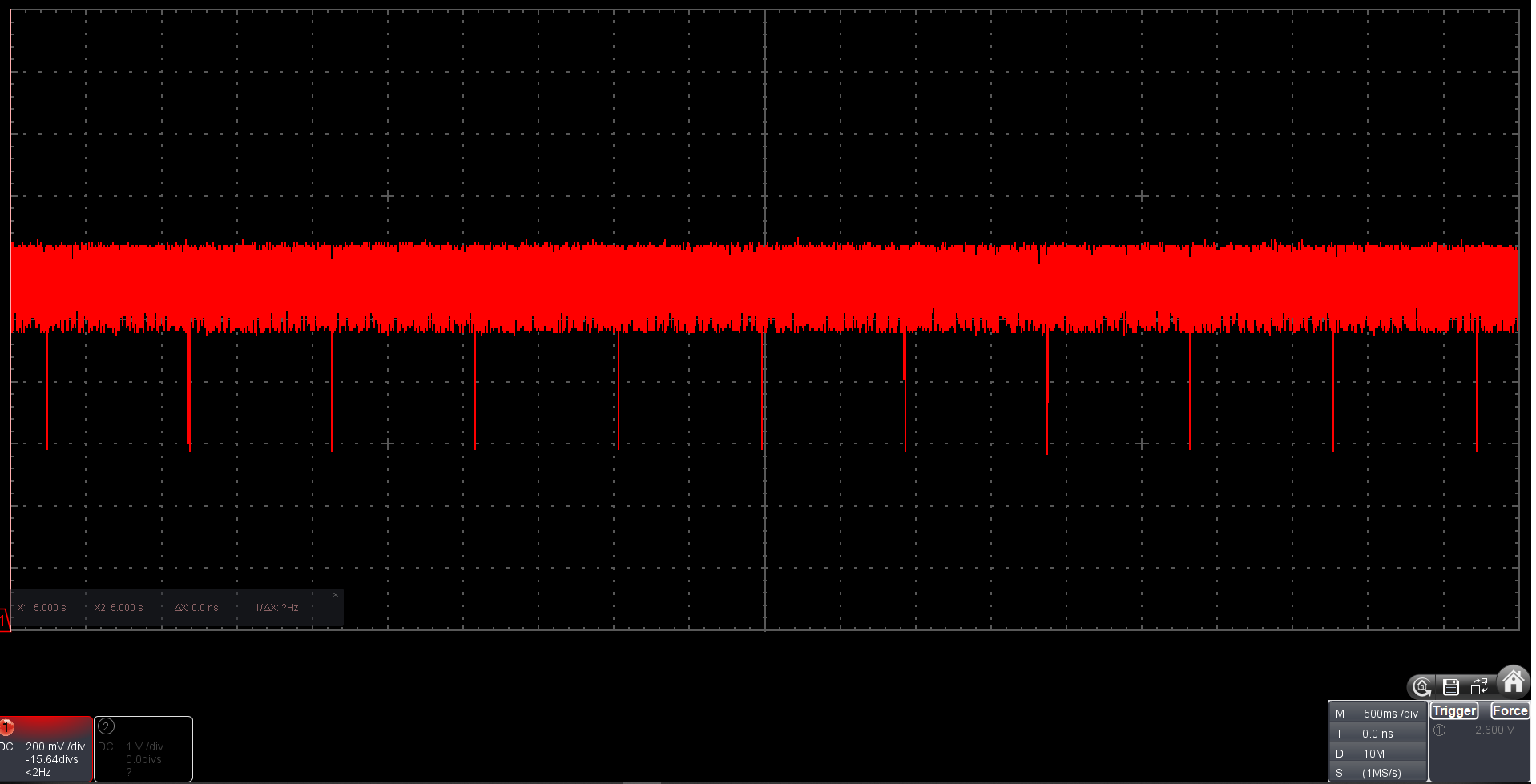
大约每秒钟可见一小段峰值,在此期间器件将被唤醒并检查唤醒光束是否到达。
设备收到命令:

首先,设备醒来,接收到唤醒光束,等待命令(从0到1秒),如果命令控制起重机,则它将打开相应的继电器1秒钟(在此阶段,您需要使控制器进入睡眠状态,同时保持腿处于当前状态,但是我我很害怕而且太懒了),剩下的时间都花在了芯片的内部操作上,之后ZUNo入睡了。 水龙头打开或关闭的每次操作总共将近3.5秒。 这是一个非常长的时间,但是由于这样的操作很少执行,因此可以忽略优化。 是的,而且几乎没有什么用,因为Arduino ide中的草图只是这个小型微控制器中被抛弃和翻转的东西的一小部分,并且被制造商从好奇中安全地隐藏了。
与“ Aquastorozh”的连接方案

结论
事实证明,相当准确地将“ Aquastorozh”添加到了现有的Z-Wave网络中。 主要缺点是缺乏Aquastorozh的反馈。 在此阶段,我正在等待ZUNo库的新版本,其中已修复了一个错误,该错误将阻止ZUNo正常进入睡眠状态,因此,而不是安装并连接Aquastorozh的照片,而是调试过程的照片。

感谢您的关注!