大家好! 六脚架的开发已接近第一个战斗版的完成,现在是时候描述其所有电子装填了。 我还添加了HC-SR04,以检测六脚架外观上缺乏视觉满意度的障碍。 将会有一个新的录像带,您将有机会以电子方式踢我。
发展阶段:第1部分-设计第2部分-组装第3部分-运动学第4部分-数学轨迹和序列第5部分-电子产品第6部分-过渡到3D打印第7部分-新外壳,应用软件和通信协议最初,该外壳是为分开的电源板和控制板设计的,因此一个放置在靠近电池的外壳中央,另一个放置在便于调试的位置。 因此,让我们开始吧。
控制单元
控制单元是基于SAM3X8E控制器的六脚架的“大脑”,它由两块板组成:带控制器的板和配电板。 带有控制器的板已被使用(下图),但是必须制造配电板。 也许将来我会在工厂订购一块板,上面有一个供控制器卸下三明治的地方。
配电板的主要目的是为“轻型”外围设备,控制器供电,并在其引脚之间分配信号。 我已经为此板准备了一份清单:
- 能够在板上安装HLK-RM04(UART-WIFI转换器);
- 能够连接I2C显示器;
- 能够连接HC-SR04;
- 测量电池电压的能力=电路板电源电压;
- 能够测量外围电源电压和HLK-RM04;
- 连接高音扬声器以指示电池已放电;
- LED指示系统状态:重要的掉落(配置不正确或其他原因),不重要的掉落(例如显示),一切正常。
在基本要素上做出了一些决定并意识到使用松散粉末制成的保留蛋的可能性之后,我立即开始对电路板进行布线,而无需创建电路图。 它是第一次工作,我在工作中没有发现任何障碍。 接线如下:
他特别弄宽了轨道,以使制造过程中没有任何问题。 我决定用LUT制作电路板,结果只有2次效果很好。 在照片的剧透下比较不成功和成功的选项(左不成功,右成功)。
好了,那么一切都按照说明进行了-我们欺骗了电路板,钻了洞并扔了组件。 结果很快就到了:
HLK-RM04插入中央,电源板的回路插入右侧的梳子,左侧提供电源。 板上的电压由一个简单的分压器测量。 在长期运行(30–40分钟)期间,HLK-RM04的稳压器会明显发热,我只是将其放在散热器中。
电源板
在重载情况下(行走10-13A,静止-5-6A),驱动器的总电流消耗(峰值)约为30A(每个驱动器平均〜1.3A)。 使用万用表凭经验进行测量。
我决定根据线性稳压器为每个驱动器分别分配功率。 18个线性稳压器-每个驱动器一个。 由于使用线性稳压器,所以LM317D2T-TR配置为输出5V。 使用18个线性稳压器和原则上使用稳压器有几个原因:
- 您不能将驱动器直接连接到电池,因为驱动器的最大允许电源电压为6V。
- 速度\驱动力与输入电压的相对独立性;
- 线性稳压器堆积如山。 我曾经在Ali上给他们买了70pcs的包装(该产品对解决方案的贡献最大);
- 我没有找到用于这种电流的线性稳压器。
- 我没有找到这种电流的紧凑轻巧的DC-DC电路。
- 并联连接调节器的选择相当可疑。
- 选项“线性稳压器+放大晶体管”使电源电路失去了线性稳压器提供的所有保护功能(至少这是人们写的,在这种情况下,我同意)。
- 我在设计开关电源方面很差。
电路板非常简单,我还没有开始为其绘制电路图,因此对快速查看结果的渴望也已显现出来。 接线如下:
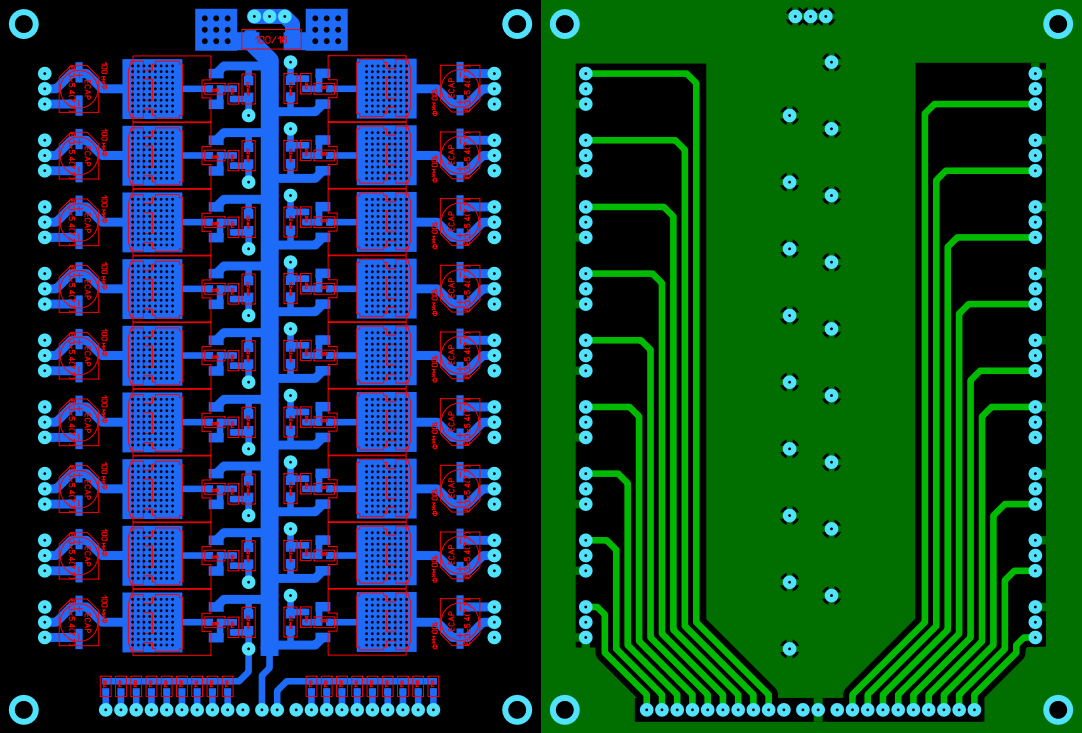
上面有用于焊接电池导线的接触垫,下面是梳子,用于电缆和控制单元的电源,侧面是驱动器。 最初,我还希望能够测量每个伺服驱动器消耗的电流量并测量电路板的温度,但决定不对其进行复杂化。
电路板简单可靠,没有任何损坏。 在11.1V(3S LiPo)和7.4V(2S LiPo)的输入电压下进行负载测试。 如预期的那样,在输入电压为11.1V时,控制器太热并且在行走时触发温度保护(散热器没有保存,SMD控制器也没有保存),这迫使我降低了输入电压。 电压为7.4V时,调节器很温暖,并且长时间行走,保护不再起作用-这就是您所需要的。
董事会还制作了LUT,并且第一次效果很好。 不幸的是,只有一张实验板的照片,我真的不想在某个地方取出新的板大约4个小时,也不想为了摄影而将其拆解(大约70%的情况需要拆解)。 新旧之间的区别仅在于板的中心线上没有孔(进行了有趣的实验)。
一些视频