猴子(黑猩猩)用棍子从白蚁中取出白蚁。 在第二张照片中,大猩猩用一根棍子收集她需要的草。
猴子(黑猩猩)用棍子从白蚁中取出白蚁。 在第二张照片中,大猩猩用一根棍子收集她需要的草。美国的开发人员
为机器人创建了专门的算法 ,从而使后者可以使用其他工具来完成任务。 而且相对简单-以某种方式将对象从A点移动到B点。
该算法包括两部分。 第一种允许机器人随机移动对象,执行一种实验。 第二部分使使用神经网络评估特定动作的后果成为可能。 事实证明,根据算法工作的机器人无需培训即可有效使用辅助工具。



一个人每天都会使用许多其他工具。 动物也可以做到这一点-鹦鹉,乌鸦,猴子和其他一些生物可以使用木棍,小卵石,荆棘来完成其所需的任务(例如,从树皮下面提取甲虫幼虫)。
对我们来说,用刀切面包很明显。 但是对于需要以机器语言形式解释每个动作的机器人-根本不需要。
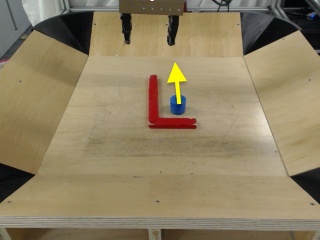
加州大学伯克利分校的科学家已经开发出一种方法,可以训练机器人使用辅助工具,并在给定情况下决定其用途。 该算法“可视化”任务,向机器人显示示例应沿哪个方向移动。 机器人(这是一个普通的机器人操纵器)已经拿起仪器并移动了一个物体。 所有运动都在摄像机上跟踪。

该算法基于神经网络。 专门的程序为“馈送”到神经网络的机器人计算不同的动作序列。 这会生成一个视频,该视频显示由于执行特定操作而将发生的情况。
机械手被赋予执行动作的命令。 如果实际结果与计划的结果相符,则计算任务。 在工作过程中,会将各种视频选项与用户提供的图像进行比较,并显示任务的最终结果。 找到最佳动作顺序后,机器人将继续解决问题。


该项目结合了机器学习方法,例如
非演示学习和模拟培训 。 在第一种情况下,机器人会随机选择选项。 结果,生成了大量数据样本,这有助于获得最佳结果。 在第二篇中,开发人员清楚地向机器人展示了如何在一种或另一种情况下使用该工具。 在这种情况下,参考解决方案会记录在相机上,机器人将与相机比较其动作的后果。
在某些情况下,机器人会“理解”最好是在没有辅助元素的情况下完成任务并执行。 即使没有显示过机器人,也无需培训即可使用工具。