您好亲爱的habratchitel!自从我们的水下
GPS的第一个工作模型问世以来,甚至还没有过去四年,从那以后我们
吃了一磅盐,制成了各种各样的系统和设备,但由于命运的缘故,迄今为止,一项重要的测试绕过了我们的长子。 在本文中,我将告诉您进展如何。
每个关注水下机器人,其控制和导航主题的人-欢迎来到伏尔加格勒水库四月水域中我们冻身皮划艇上的猫!

(Akhtung!剪切下来的照片很多!)
“ ...船的真实位置,尽管它是已知的,但并非偶然,
是的,但在什么时候尚不清楚。”
Aleksishin V.G. 和其他实用导航,2006年。第71页。
这是怎么回事?
对于绝对没有时间阅读的人,我将简要描述问题:
GPS不能在水下捕获,无线电通信也不起作用,几乎所有导航都是使用声音进行的,通信是使用声音,电缆进行的,有时甚至是在清澈的水中使用
光进行的 。
对于新来者,传统上,我会提供指向枢纽以前出版物的链接,在这里我们讲述水下通信和导航的所有内容:从创建水下GPS和通过水传输“视频”声音的历史,到有关如何用垃圾制造简单的水声天线的说明:
-
每年从零开始的水下GPS-
我们制造了世界上最小的声纳调制解调器-
关于蓝细菌对总裁的言语功能的影响-
用垃圾桶制作一个简单的声纳天线-
暴露于水中的视频声音传输会话-
两个收发器上的水下“ GPS”-
水下航行:不承担责任-您注定要成功-
水下GPS:继续无人机飞行,滚动,在地面上爬行以及在地面上漂浮,都会实时传输来自摄像机的视频,有时还会传输GPS坐标,而且操作员始终知道设备的位置,而且操作员经常可以看到它。
对于水下车辆(TNPA或ROV),一切都有些不同。 让设备进入黑暗的水中,您可以肯定只有一件事-它肯定在水下。
更深入地了解问题
设备按大小和任务划分为不同的类别。 最简单,最小(例如我们的产品)的检查只是带电缆的摄像机。 更复杂,更大的可以装备机械手和其他有趣的改装,
一些瞪羚大小的
标本配有专门的船只,
海盗和登船人员 ,总容量超过200马力。 在小型设备中,电缆长度可以从几十米到数百米,在大型大型设备中可以达到数千米。
TNLA名义上受到视觉反馈的控制-查看通过电缆从摄像机的摄像机传输的图像,有时它们装有声纳,因为有时水
总是混浊。
这种方法有一个缺点:在监视器中看到感兴趣的景观元素的图像,绝对不可能确切地说出它的位置。
水下导航
他们正在使用声学定位系统来克服这一缺点。 通常,他们在设备上放置一个pinger(周期性地发出特殊信号)或一个应答器信标。 检测到pinger信号,确定距离,然后通过信号到达的角度(或两个角度(水平和垂直)和距离)确定设备的位置。 这种系统称为UKB(Ultrashort-Base的缩写)。 它们与测角测距仪有关,并且有很多缺点,特别是在此任务上。 最简单的外国车起价为
17,000欧元 ,我们的车
也在那里 ,没有比这更便宜,更便宜的了,但仍然不是免费的。
为了确定响应者或pinger信号的水平到达角(在旧系统中为垂直,在新的pinger中发射其深度),需要一个测向天线。 该装置本身并不简单,需要安装在必须安装在船上的杆上。 通过范围,深度和水平角度(或通过范围和两个角度),仅确定设备的相对位置。 在这种情况下,精度会随着距离的增加而降低。
确定角度的精度取决于:
- 天线本身的特性通常约为0.5-3°,而在最先进的系统中,约为0.03°,但值得一掷千金。 让我提醒您,距离1000米1度会产生17米(即±17米)的距离。
- 确定天线本身位置的好坏(滚动和修剪);
- 根据特定的水文条件。 例如,可能不检测直接信号,而是检测一些反射或其总和,从而确定反射信号的到达角度。 他可以从任何事情中进行反思-包括从完全不同的方向进行反思。
确定信号的距离和到达角度后,您需要将所有这些与地理位置联系起来。 也就是说,您需要知道测向天线的地理位置及其相对于北向的零方向。 然后,您可以解决
直接的大地测量问题,并确定水下航行器在地理坐标中的位置。 也就是说,您的天线上仍然必须有指南针和GPS。
总的来说,我坚信只有在完全不可能使用长基地系统的情况下才应使用UHF。
我强调-绝对。 例如,当放置一个拖曳对象时,您需要走很长一段距离。 在这种情况下,必须经常移动长底座的元件,这将导致花费大量时间和精力,或者,例如,由于深度大,将不可能在表面上安装长底座的浮标-非常长的绳索,并且通常将需要锚定方案非常复杂。 在所有其他情况下,我都可以想到:使用一个较长的基数-更简单,更可靠,更准确。
UKB很好,而且在您需要查找某些东西,逐渐接近并提高准确性的地方必不可少。 似乎我反对UHF和DB,但我只是在呼吁根据其预期用途使用设备。 最后,我们也做了克格勃,鉴于此,很难指责我有偏见。
远程(DB)系统-这是当有几个远距离的接收器或发送器时(例如GPS是一个远程系统)。 它们与测距仪或差分测距仪系统相关,因此可以在底座内部保持精度,不易倾斜,并且通常可以提供更好的结果。
很长时间以来,我无法回答这个问题-为什么每个人都试图用铁锹敲钉子? 但是随着时间的流逝,我和我的同事得出的结论令人失望:首先,人们的思考非常简单-与长相距遥远的几个要素相比,一根天线和一个刺耳要容易得多。 其次,直到最近,DB系统仅以所谓的 底部的底座,其安装需要非常严肃的时间和金钱。
长期以来,我们一直在反对
使用既定事物顺序的
用户文盲 。 这始于我们制作水下GPS的第一个示例,该示例是具有表面而不是底部基座的长基座系统。
水下GPS
让我们回到今天测试的英雄。 导航系统由导航基础本身表示,该导航基础由GNSS信号的四个
浮标-中继器组成 :

在开始工作之前,将浮标借助
石锚和绳索安装在池塘上。 所有需要做的就是在释放锚之前的浮标,方法是单击开关。 这确实是需要做的所有事情。
该系统的另一个要素是位于水下物体上的导航接收器:
 RedNODE
RedNODE导航接收器(黄色的小圆柱体)安装在设备的背面。 它由机器人的车载网络供电,并通过设备的电缆传输数据。
由于浮标仅发射,并且接收器仅接受(根据差分范围方案操作)并且没有人打扰任何人,因此在一个水域中的一组浮标上,任何数量的此类接收器都可以工作。 也就是说,理论上,任何数量和比例的整个水下车辆和潜水员队伍都可以航行。

由于天气繁忙,我们宁愿随便固定导航接收器,并增加一些由致密的隔热材料制成的浮力。
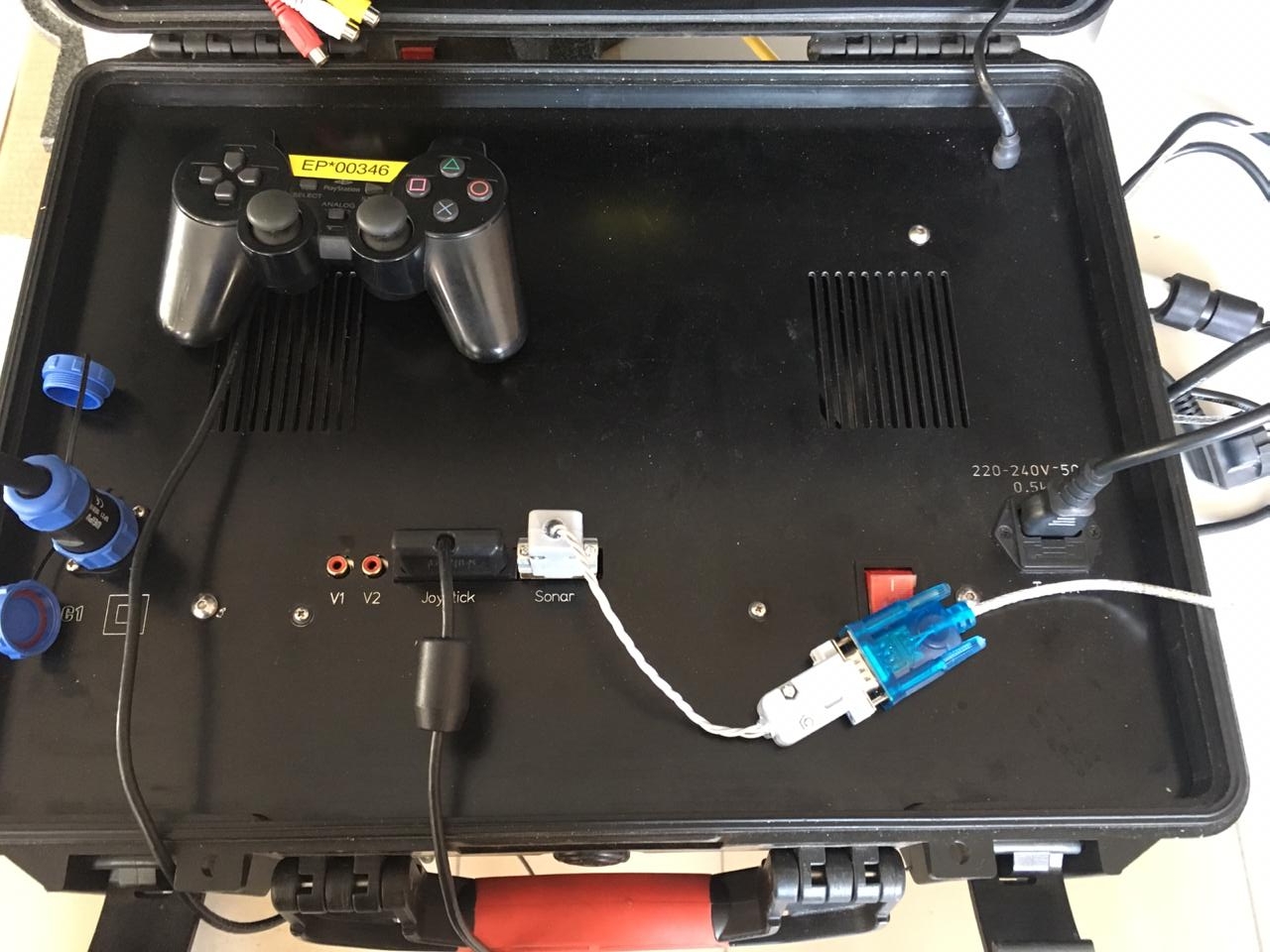
来自接收器的数据进入控制箱,并通过RS232 <-> USB转换器(照片中的“ Sonar”连接器)输入到任何笔记本电脑中。
该系统中的坐标在接收器处生成(即,严格来讲,该系统是导航系统,而不是定位系统)。 但是,由于TNLA在电缆上运行,因此原则上将设备上计算出的位置向上传输到电缆应该没有问题。 顺便说一句,导航接收器模仿常规的GNSS接收器,并且可以作为最普通的地面GPS接收器直接连接到例如我们所做的
SAS.Planet应用程序。
水下机器人的定位是我们在2015年开始开发水下GPS时捕捉到的主要想法。 具有讽刺意味的是,直到2018年,该应用才被人们追捧-该系统主要用于潜水表演。
这部分是由于TNLA制造商非常不愿意修改其设备,部分是由于用户非常强烈地认为放置浮标既困难又费时。
现在考试班的设备全由大家来完成,字面上,我们已经数不清了。 为了清楚起见,以下是远离制造商的完整列表:
-整个
TOP-10 2019-另外一个
TOP-12 2019-
甚至是另一个TOP ,这次是预算设备
-我们的
ROVBUILDER-
备受赞誉的OpenROV-加拿大
器具-国内
GNOM-令人想起
Blueye的东西
-其他
装置有十几个或两个不同的大学团队,如果您看的话,还有很多类似的项目,因为我们甚至没有涉及较大的工人阶级设备和任何自治设备(所谓的AUV或AUV)。
它们彼此之间几乎没有什么区别,并且具有非常相似的功能。 我们相信,将为其设备配备简单可靠的导航系统的机器人制造商将获得决定性的优势。
当我们三个人开始时,我们中的一个人(
Creathor )在莫斯科,负责所有组织,财务和营销问题,而我和
StDmitriev在伏尔加格勒,我们膝深
浸在冷水中,从购买的充气船上将四个浮标放在一起在十项全能运动中。 随着时间的流逝,我们花了15到30分钟。 这就是部分原因,当他们告诉我,放置浮标既困难又漫长时,
我的手伸向毛瑟岛,而我的脸通常会感到困惑。
更深
所以这一次,我们进行了四个测试,将所有东西都装进了两辆乘用车中:

此类行李需要进行测试:
-ROVBUILDER RB-150水下航行器,带100米电缆和控制箱
-带四个RedBASE浮标的表壳
-800瓦特汽油发电机
-双人充气皮划艇“ Shuya”
-带四把折叠椅的折叠桌
-四个铺有20米绳索的铺路板作为锚
-手提电脑
-四人的5-6小时食物储备
尽管看起来很简单,但我们无法使用带有这种船体的UHF系统-要安装UHF天线,您需要带硬底和杆的船体。 同时,需要一直在水上。 例如,在0°C时,空气并不十分舒适,有时甚至根本不可能(请参阅“风,浪,俯仰”)。
“控制站”的部署大约需要10分钟,在我们的案例中,它看起来像这样:

传统上,所有需要稍微宽阔的水库的测试都
在Pichuga河的
河口(流入伏尔加格勒水库的地方)进行。
进一步潜水
我提到浮标通常在15-30分钟内安装好,这次也不例外。 此外,我特别启动了秒表,两个人乘皮划艇设法在24分钟内划桨,就像真正的帕潘宁人一样,迎着风和兴奋地战斗。

照片显示了浮标如何放置在小型充气皮划艇中。 全部四块。
您可能会认为该设备也浸没在船上,但完全没入水中:在配备一双橡胶靴的人员的帮助下,该设备从岸上被带入水中:

这是水下世界的第一张照片:
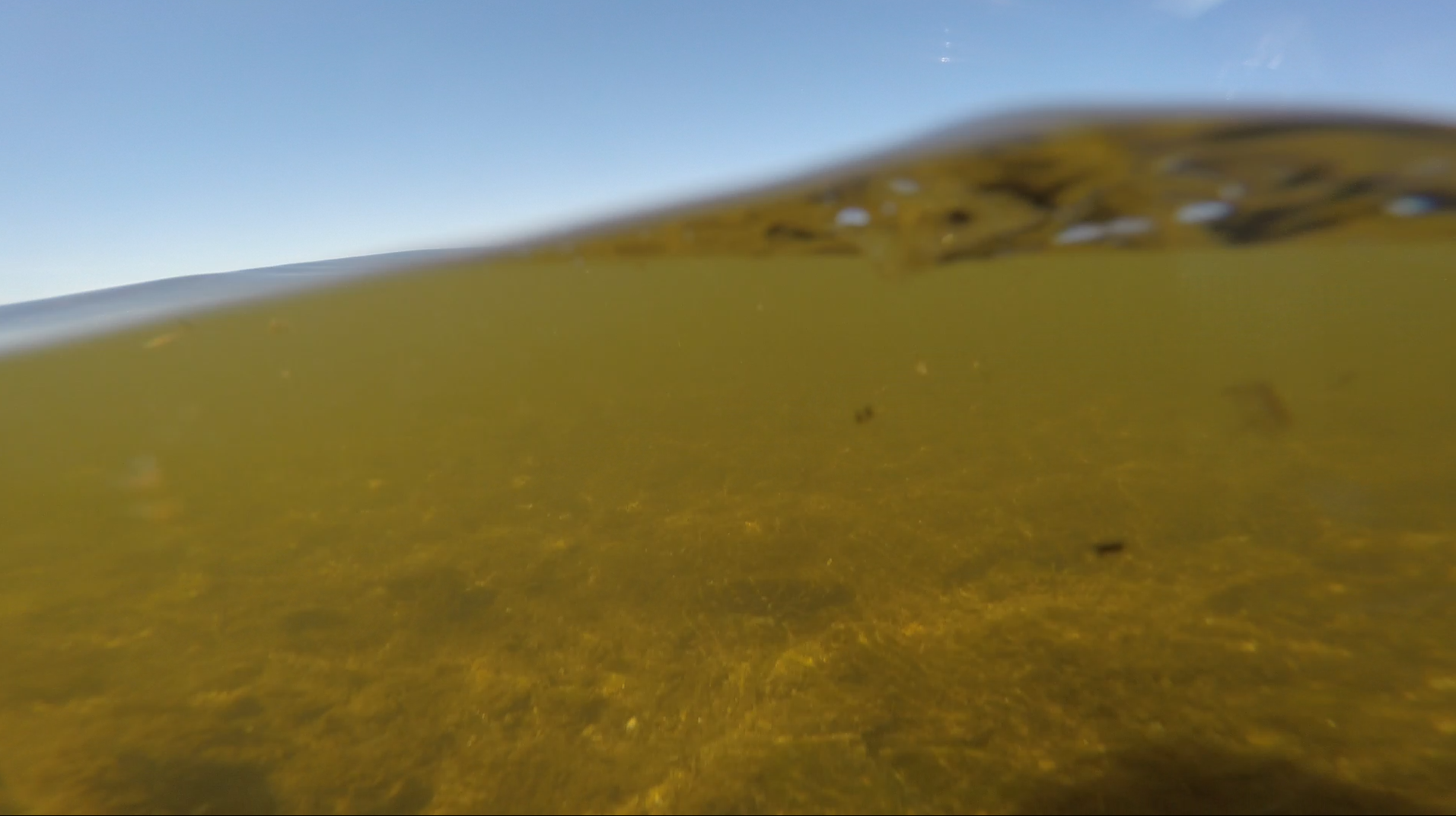

是的,这不是您想要的红海:-)水似乎是透明的,但实际上海岸附近的能见度不超过1-2米。
一个严重的问题立即变得清晰起来-在晴天,在操作员的屏幕上,没有任何东西是绝对可见的(除了反射):

同时,GoPRO HERO3 +作为摄像机安装在机器人上。 这个事实让我们感到沮丧和沮丧,但是鉴于令人毛骨悚然的屏幕闪烁,完全无法控制图片。 也许某些屏幕可以消除此缺点。 顺便说一下,一些机器人制造商为其产品配备了VR眼镜。
事实上,从摄像机的摄像机上传视频时,我们的沮丧感更加深远:从原则上讲,图片非常好,并且很有可能使用它。 很遗憾我们没有在此过程中看到所有这些!
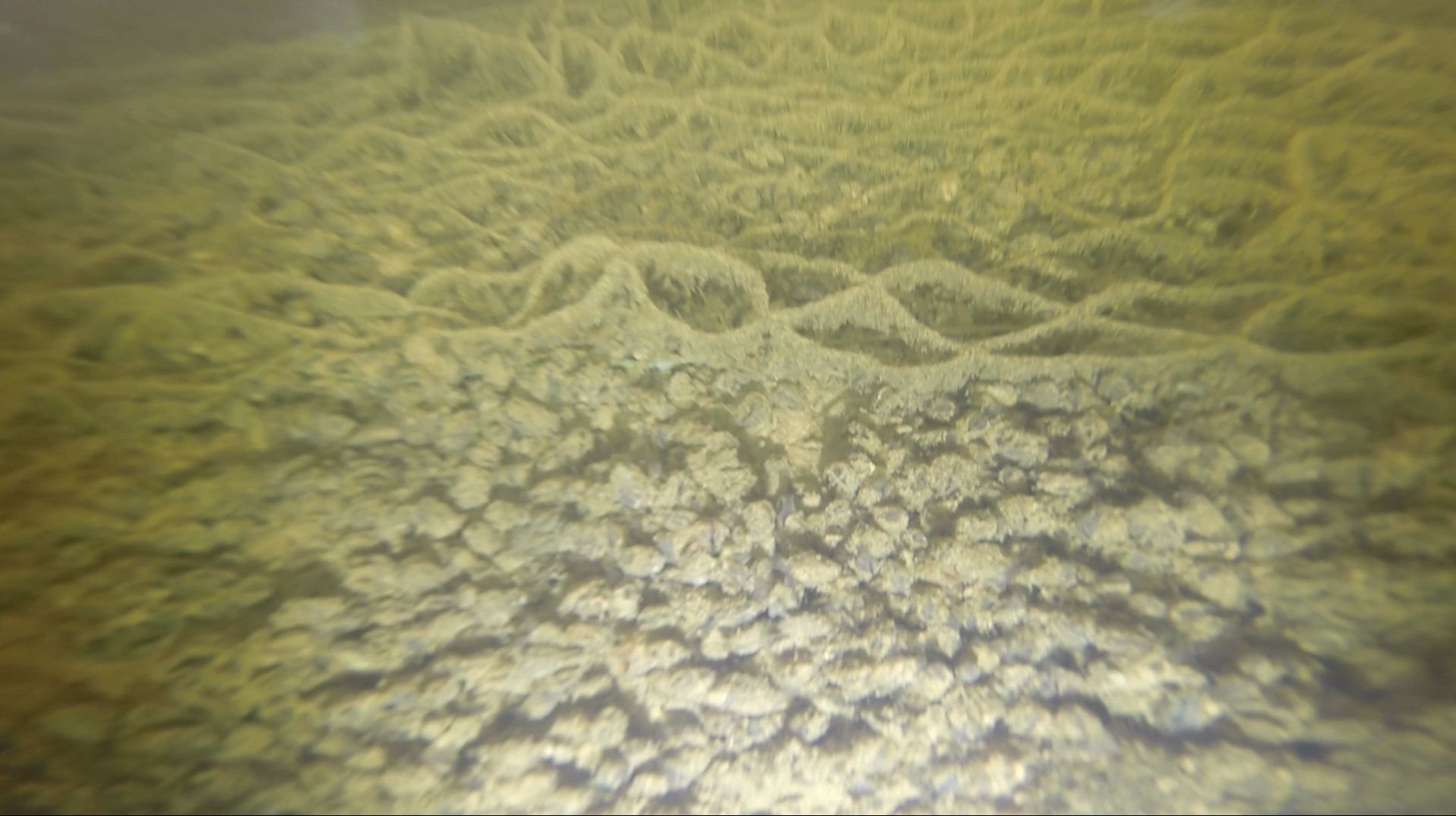
这里是底部的第一次接触,以及13米深度的“月球”景观的元素:

几秒钟后,从字面上看,该装置向前航行,撞上了满是小贝壳的泛滥的木头:

实际上,图像质量要好一些,但是我必须从使用机载GoPRO捕获的视频中截取屏幕截图。
在下图中,如果您仔细观察,则可以在右上角看到在
邮递cru鱼途中遇到的第一条鱼:

在测试过程中,我们还不知道相机在写出好图像,有时甚至是出色的图像,并且对盲目地控制设备感到困惑。
然而,他们决定坚持预定的方案。 本来是想从船上淹没一个容易看见的物体,然后借助GPS电话保存该地点的坐标,然后在我们的导航系统指示的引导下,尝试使用机器人到达该地点。
由于通常在对角线阅读文本时没有适当注意细节,因此我得出结论,在该系统的浮标声发射器中,升压变压器的绕组应由木头制成,而其中会感应出木制的EMF,并且木制的电流将流动。
在底部上方的一段通道中,相机的相机捕获了一条淹死的渔网:
至此,我们在测试过程中发现的景象到此为止。
谁想要用自己的眼睛评估视频的质量,我们将链接链接到
youtube上的其中一个记录 。 给出的记录无需任何处理和编辑。 那些希望的人可以仅通过来自摄像机的图像而无需导航来独立得出关于在水下管理和执行有意义的动作(例如,搜索某物)的便利性的结论。
我们得出的结论是,仅使用图像来控制设备是完全不可能的。 基本上,我们仅以导航系统为指导,该导航系统在线显示设备在地图上的当前位置。
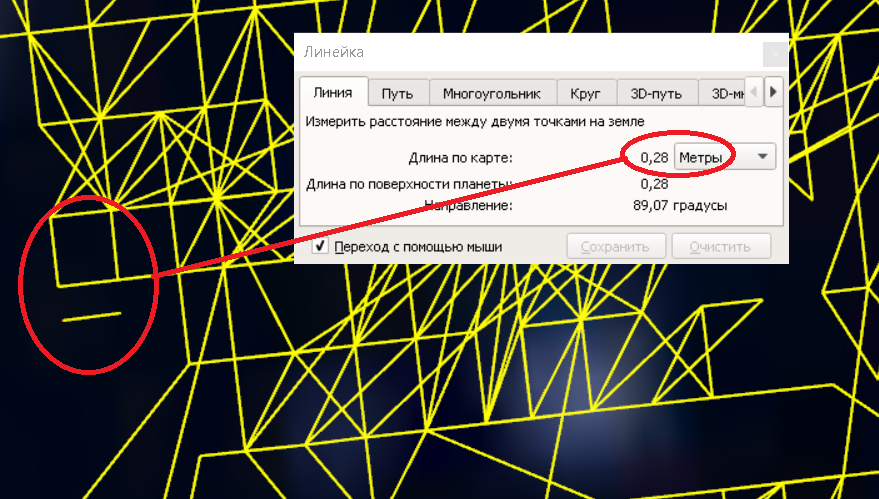
从轨道绘制的网格可以看出,该系统在大约30厘米的真实水库中的分辨率令人愉悦:
与其他情况一样,运动过程中点的传播范围为1-1.5米:
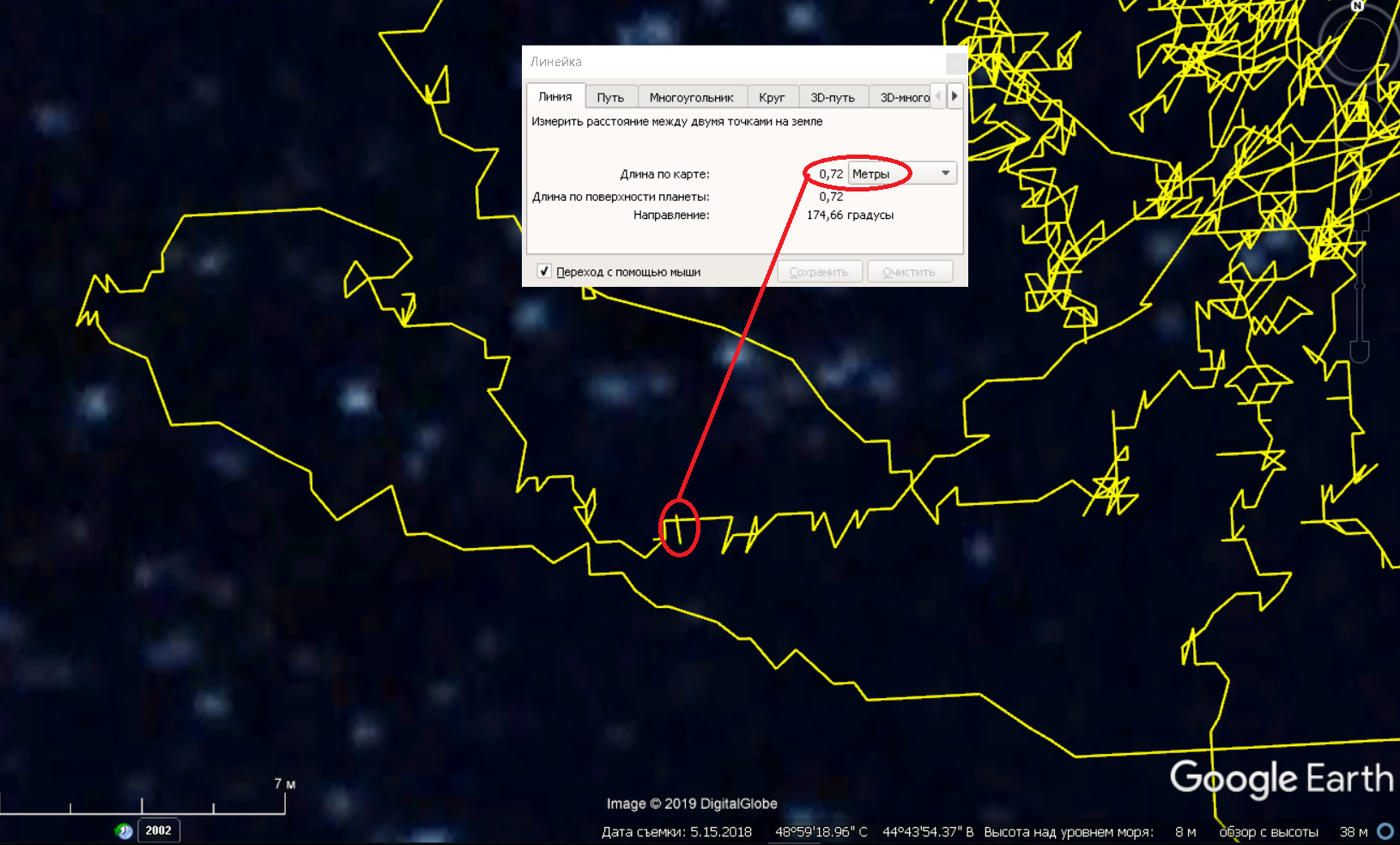
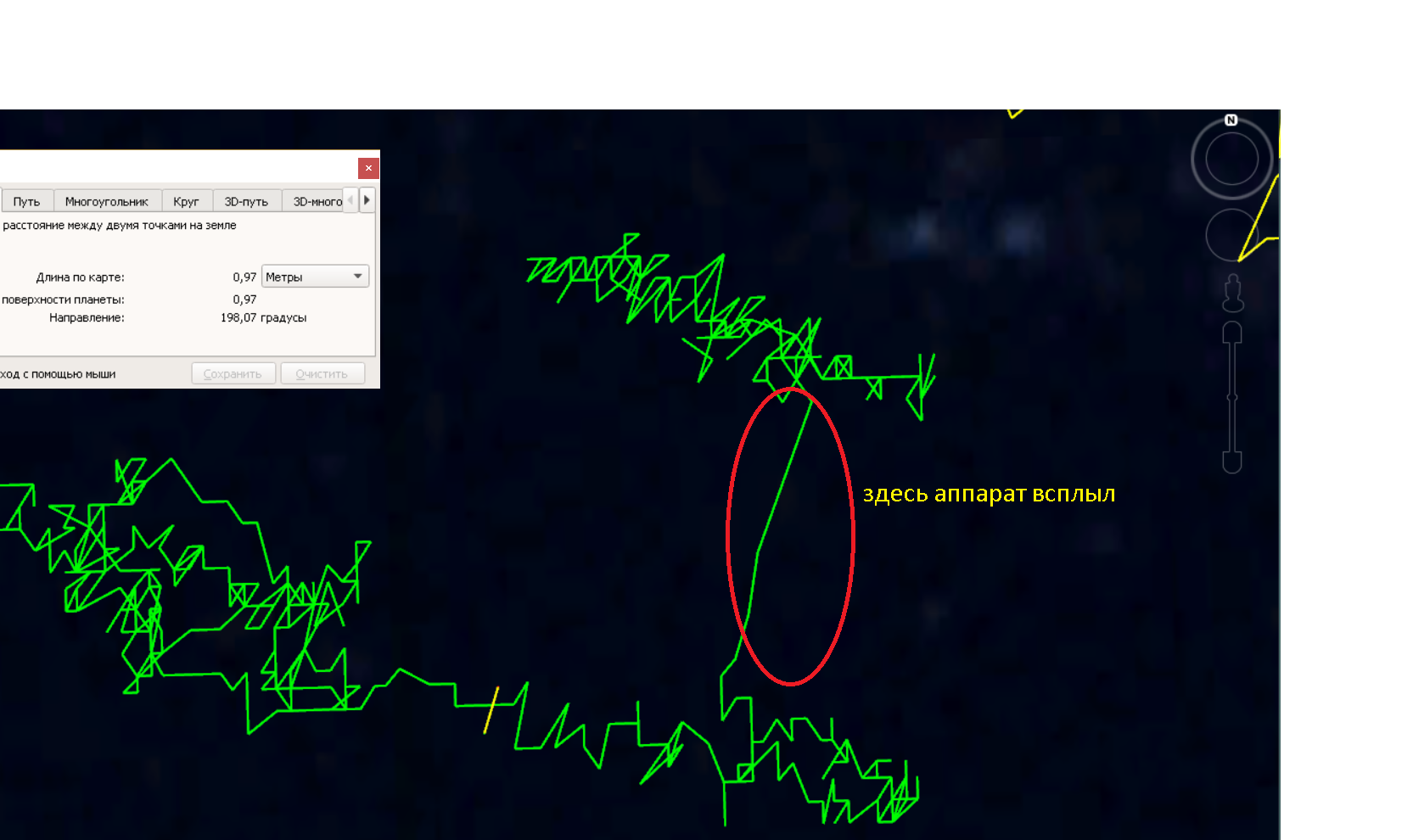
设备运动的最终轨迹如下所示:
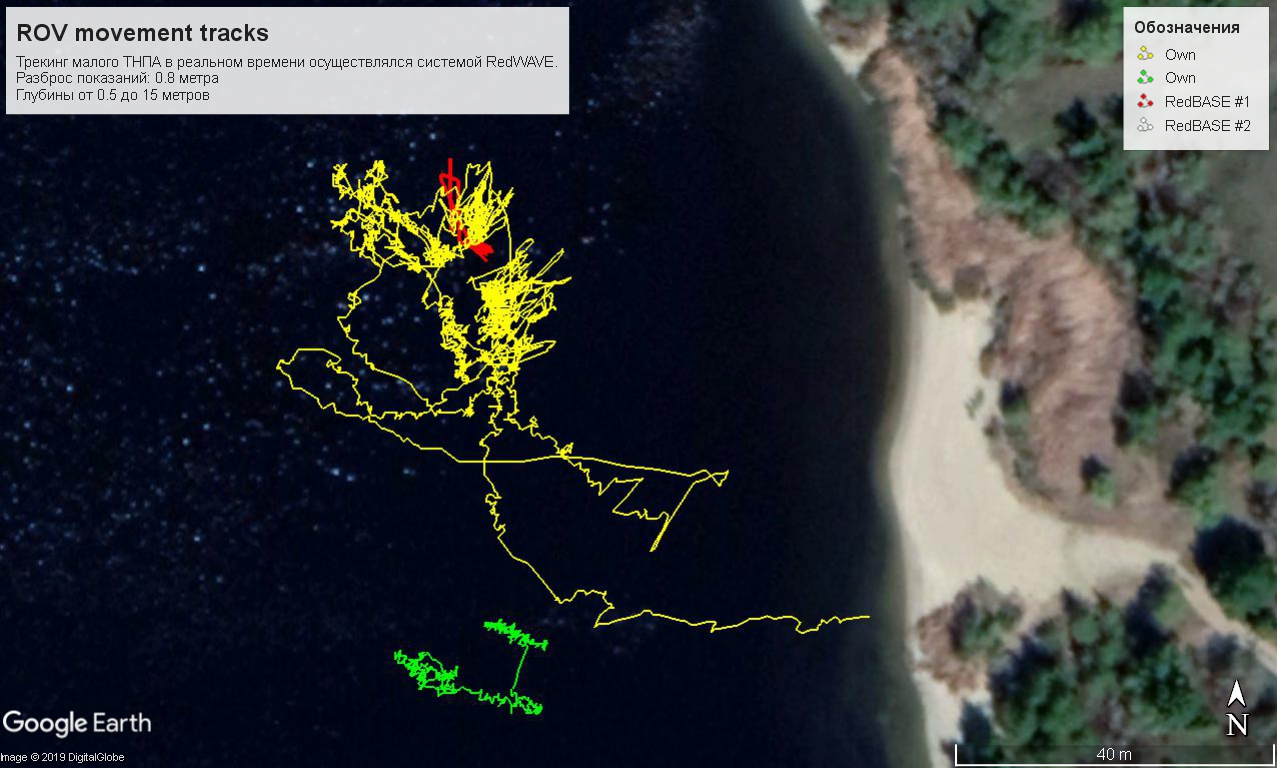
尽管我们没有计算工作地点,但几乎有一半的轨道(红线的左侧)位于基座外部,即 在浮标之外,系统应该工作的更差。 但是,除少量排放外,系统正常运行。
在其中一个过道中,该设备非常靠近拟淹没物体的位置:

但是,仔细观看车辆车载摄像头录制的视频一小时或更长时间,我们从未见过想要的物体。
可能有多种原因:首先,对我们来说,这实际上是在真实水域中控制设备的首次体验;其次,眩光屏幕使我们失去了“在线”观察设备附近水中发生的情况的机会。 第三,该装置
剧烈地,疯狂地对“方向盘转弯”做出反应,并且很难从不习惯的位置对其进行控制,甚至很难保持简单的运动。
以防万一,我附上了
最终的曲目,以便对自己感兴趣的人可以改变它。
下端
总而言之,我想说的是,我们所有人都像一颗从灵魂上掉下来的石头一样-我们终于针对该系统的预期目的对其进行了测试。
我们取得了很好的成绩(和经验!),控制了一辆水下航行器,用木炭煮了蘑菇汤,拍了张照片,总体上过得很愉快。感谢您的关注,我们将一如既往地感谢您的反馈和建设性的批评!UPD!
我们整理了一段简短的视频,并做了一些解释。包括在SAS.Planet中实时显示设备轨迹的过程