如果您曾经编写过用于控制机械臂或任何类似机器人的机械的软件,并且通常具有三个以上的自由度,那么您就会知道,大部分时间都需要对运动本身进行编程。 现在,假设您通过随意连接链接和驱动器来构建机械臂,然后软件确定链接的长度,链接的位置,旋转角度等。
这就是哥伦比亚研究公司的研究人员编写软件的过程,
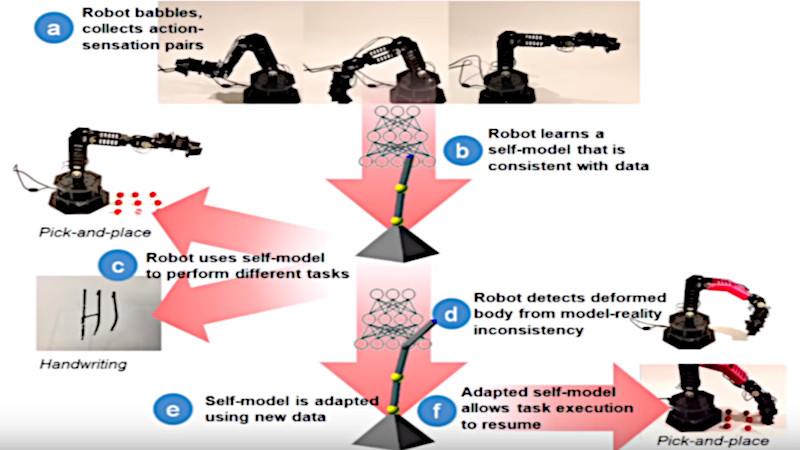
他们学习如何设置由其控制的机械臂 ,而对发动机的物理,几何或动态特性一无所知。 首次发射后,他不知道机器人的形式,发动机的工作方式以及它们各自的影响方式。 在大约一天半的时间里,首先要谨慎地做出一些随机的动作,并收到有关正在发生的情况的反馈,该软件使用了深入的培训,可以对内置的模拟器进行配置,从而使虚拟机器人尽可能地具有物理性。
项目经理Lipson和他的研究生Robert Kwiatkowski正在试验具有四个自由度的铰接式机械臂。 在软件培训开始时,模型不准确,并且不确定链接的连接顺序。 经过35个小时的训练,该模型与实际情况相符,精度不低于4厘米。 然后,该软件迫使roboruk拿起并移动对象,而每次移动之后,都将根据仅由独立训练形成的模型进行额外的重新校准。
为了确定此类软件是否可以检测出对转子臂的损坏,打印了类似但经过特殊变形的软件来代替其中一个部件。 该软件确定已更改,并对模型进行了适当的更改。 不久,它执行了提升和移动物体的任务,但效果稍差一些。
由于有关机器人设备的软件内部思想不是一成不变的,因此,它不仅可以表现得越来越好,而且还可以适应损坏和结构变化。 而且,随着零件的逐渐磨损以及形状略有不同的零件的替换,一切将继续起作用。
当然,由此类软件管理的roboruk不会很快像
Dexter一样准确,
Dexter是具有传统软件的roboruk,它在2018年Hackaday竞赛中为开发人员颁发了奖项 ,但有趣的是,它的工作原理是: