在the娥四号着陆器和Yutu-2漫游者的月球另一端开始了第五个地球月的工作。
两种设备均成功度过了寒冷的第四个月夜,现已退出睡眠模式,并继续在月球背面和周围的外层空间的复杂表面上进行研究。
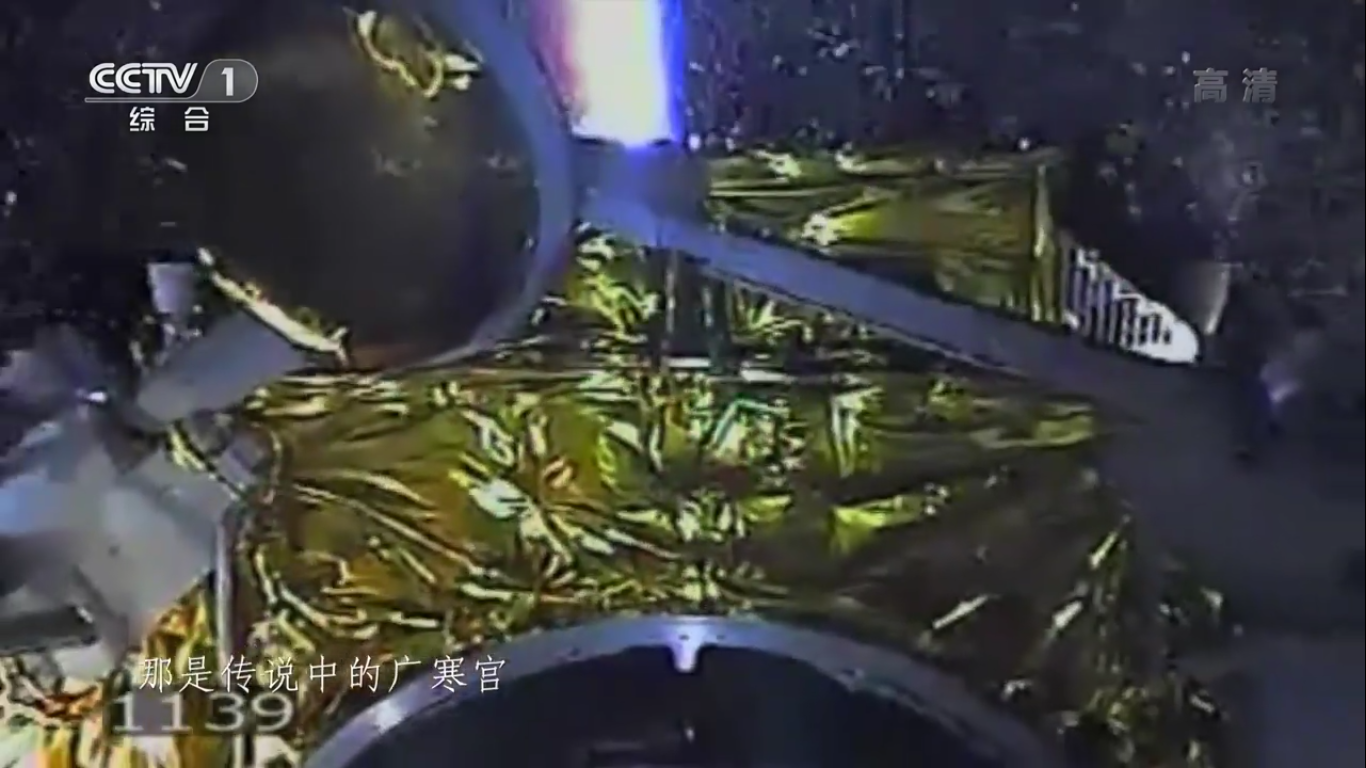
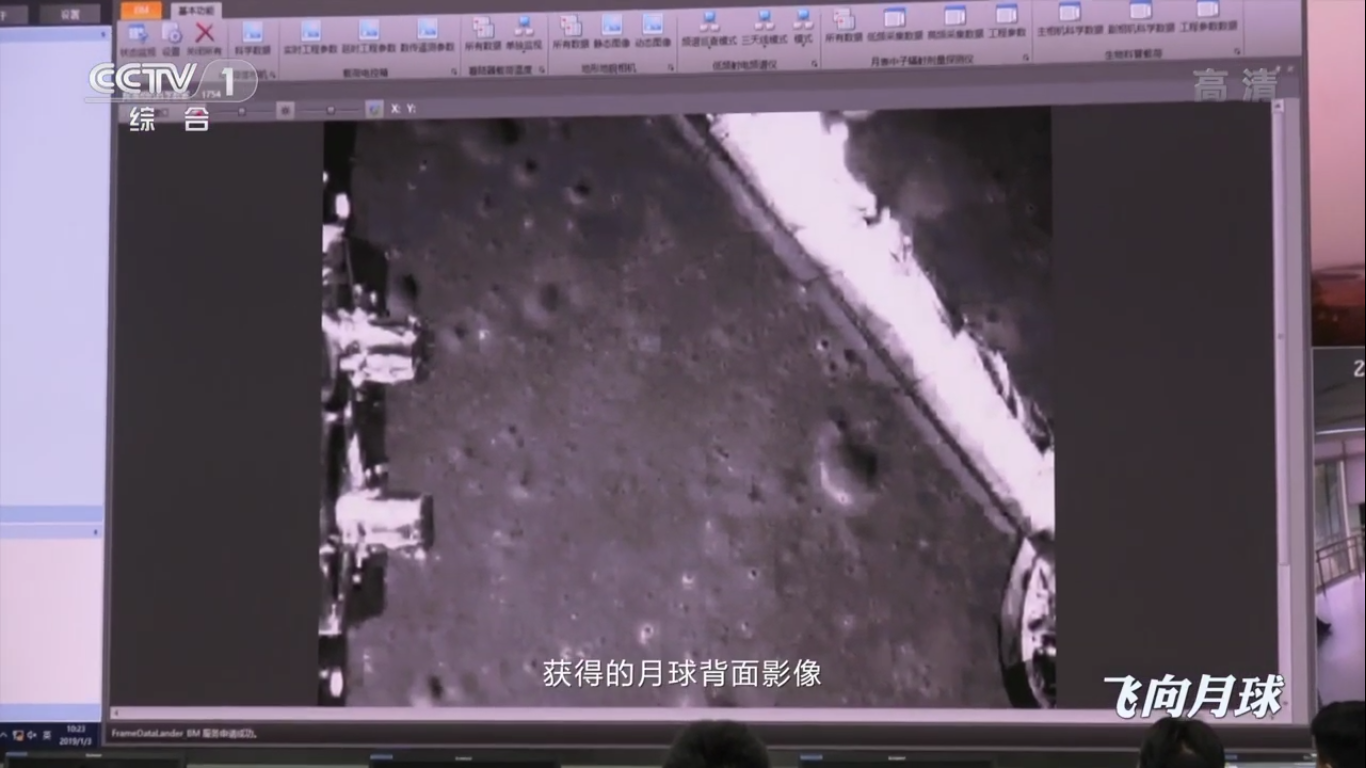
月球背面的新照片,发射和着陆任务的时刻。
注意,出版物中有很多图片。Yutu-2漫游车于2019年4月28日上午退出睡眠模式,4月28日晚上,the娥四号着陆器也醒来,这两辆车开始在月球上进行第五天换班。
晚上,在月球的另一侧,根据the娥四号模块的传感器,月球表面的温度下降(最低)至负190摄氏度。
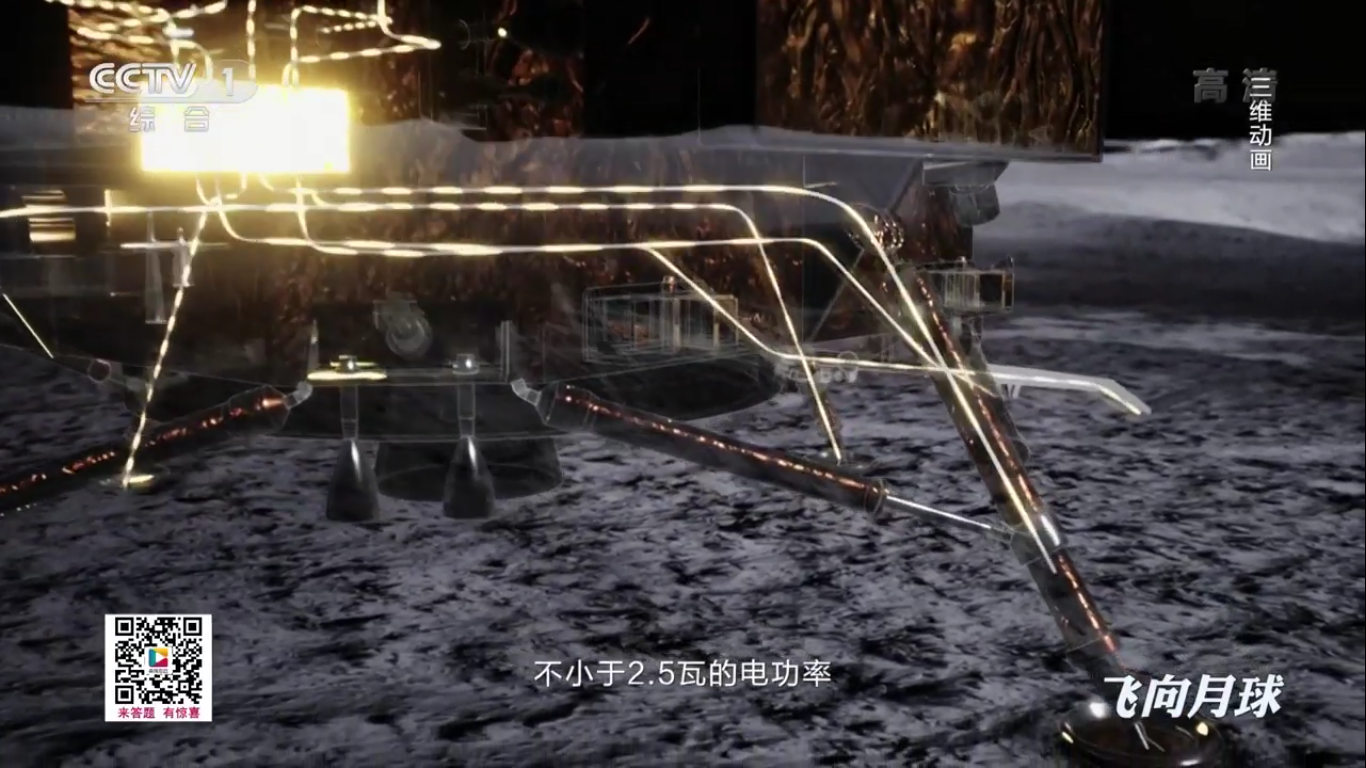
俄罗斯联邦核中心(VNII实验物理(VNIIEF))开发的热单元负责在月光下的夜晚加热the娥四号模块,它们是辐射热源(RIT)和放射性同位素电力(RTG),旨在为中国系统供电月球任务。
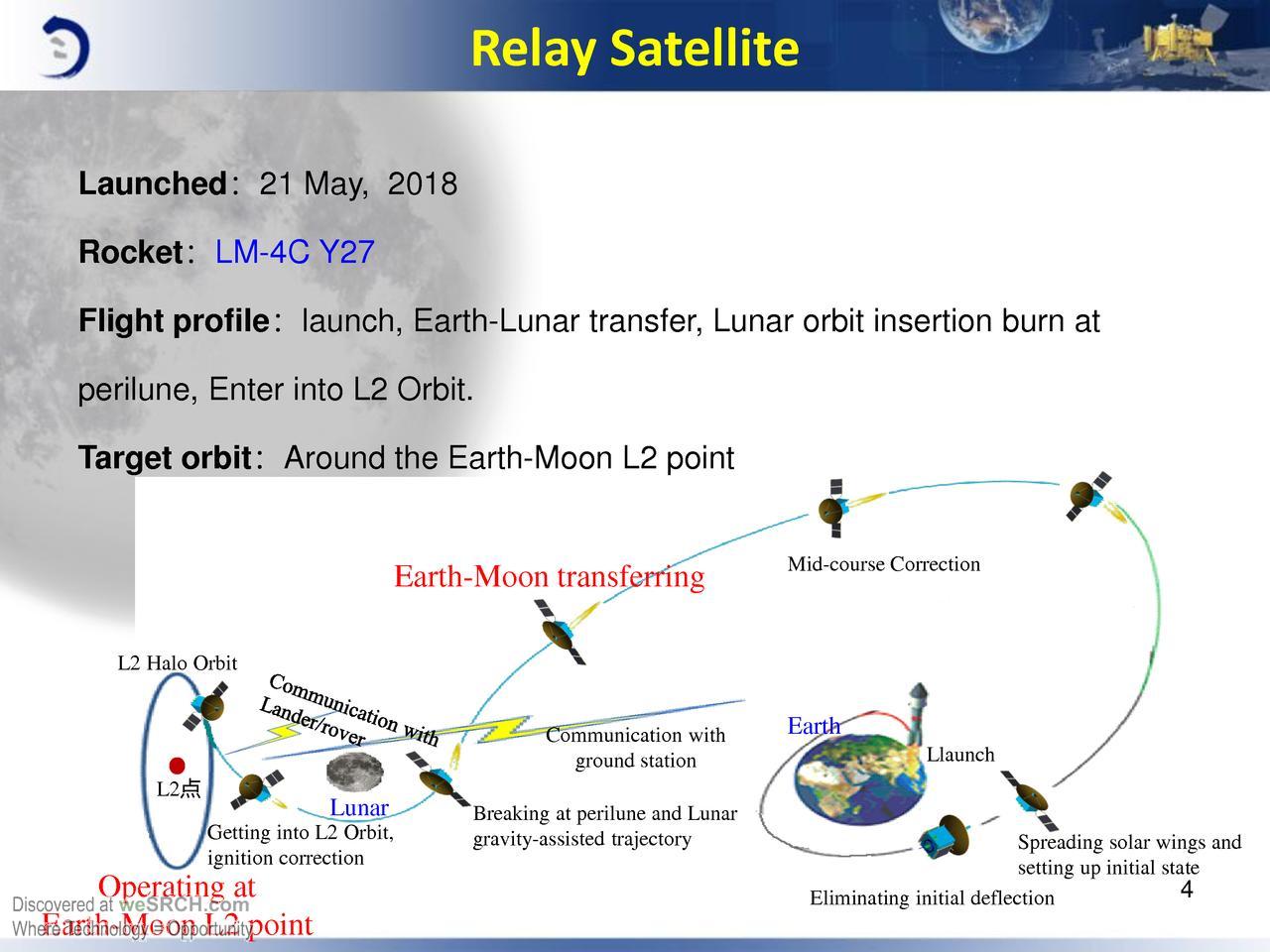
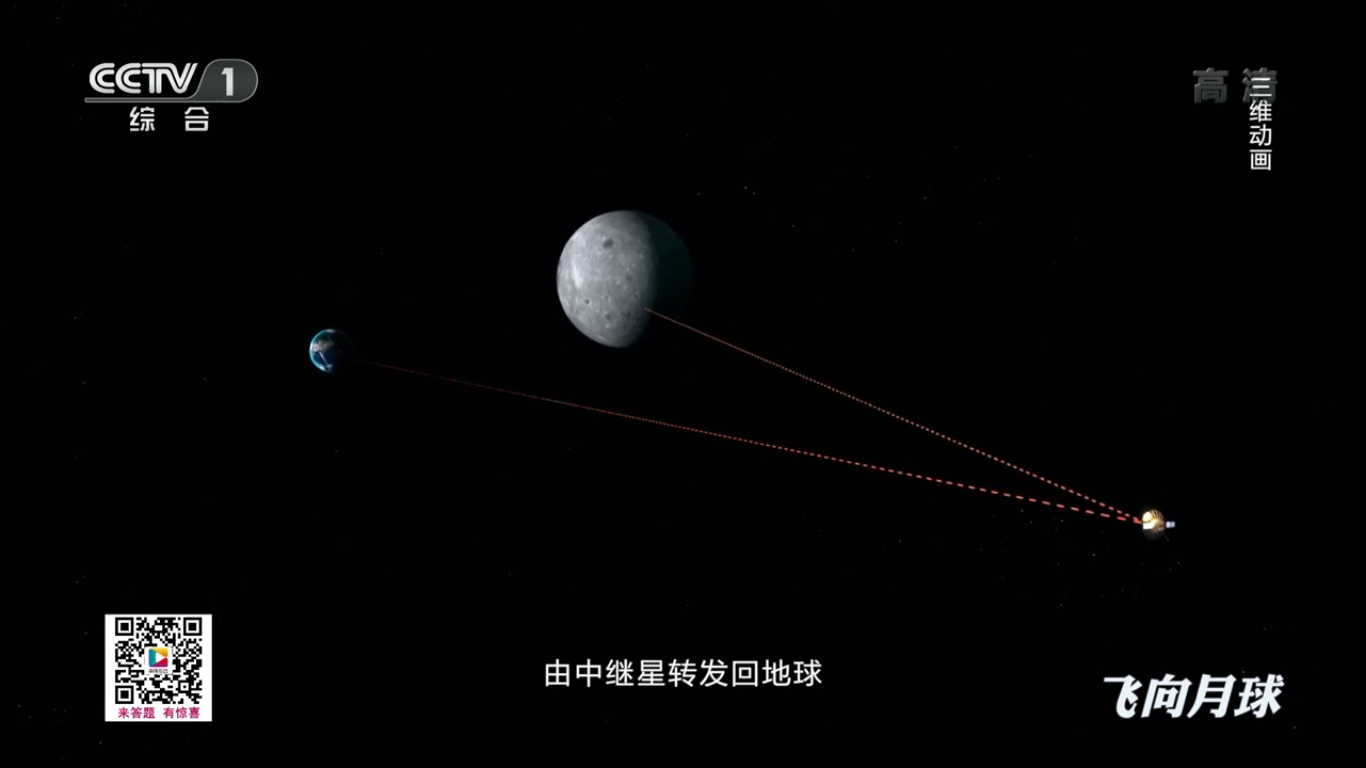
有关the娥四号登月任务的项目和模块的数据:2018年5月21日:从西昌中国航天局发射了Tseyuqiao中继卫星(第四十座桥),这是组织地球与月球另一侧之间通信的必要条件。
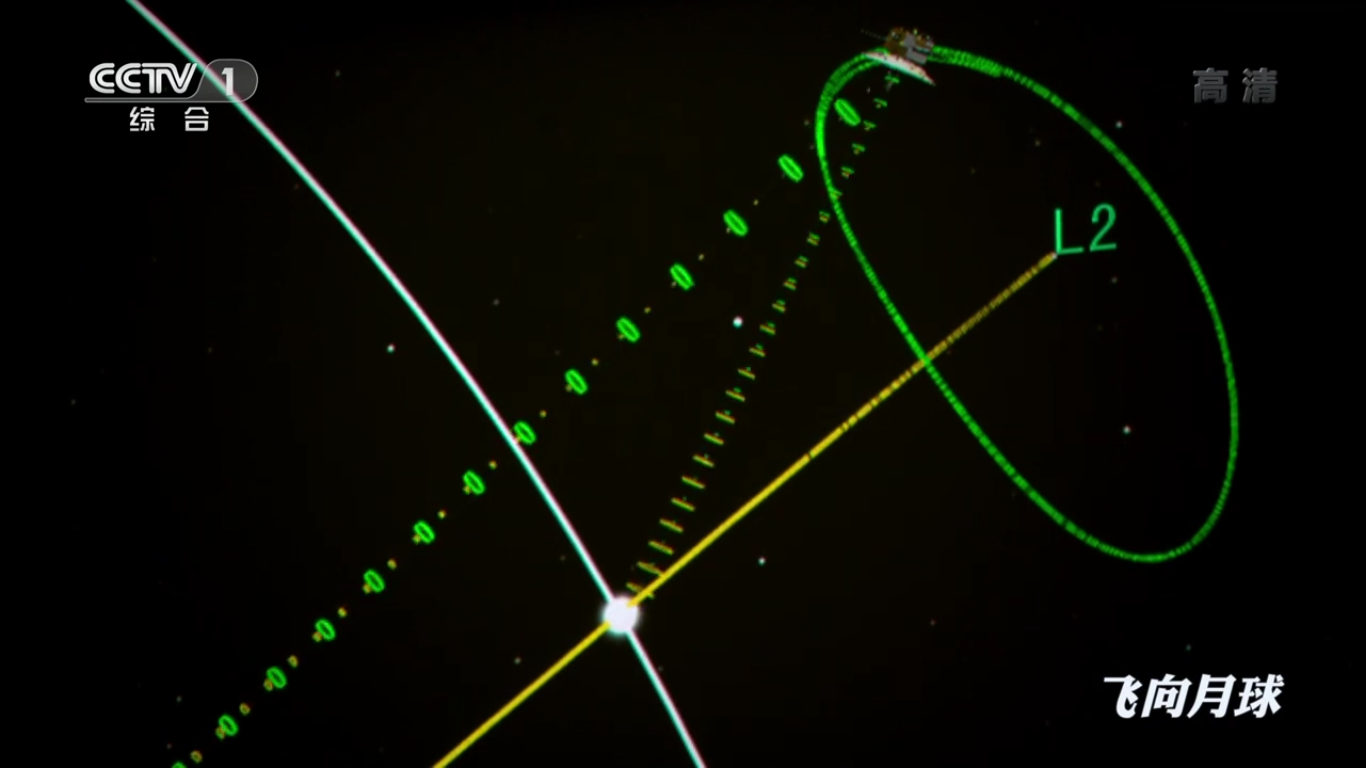
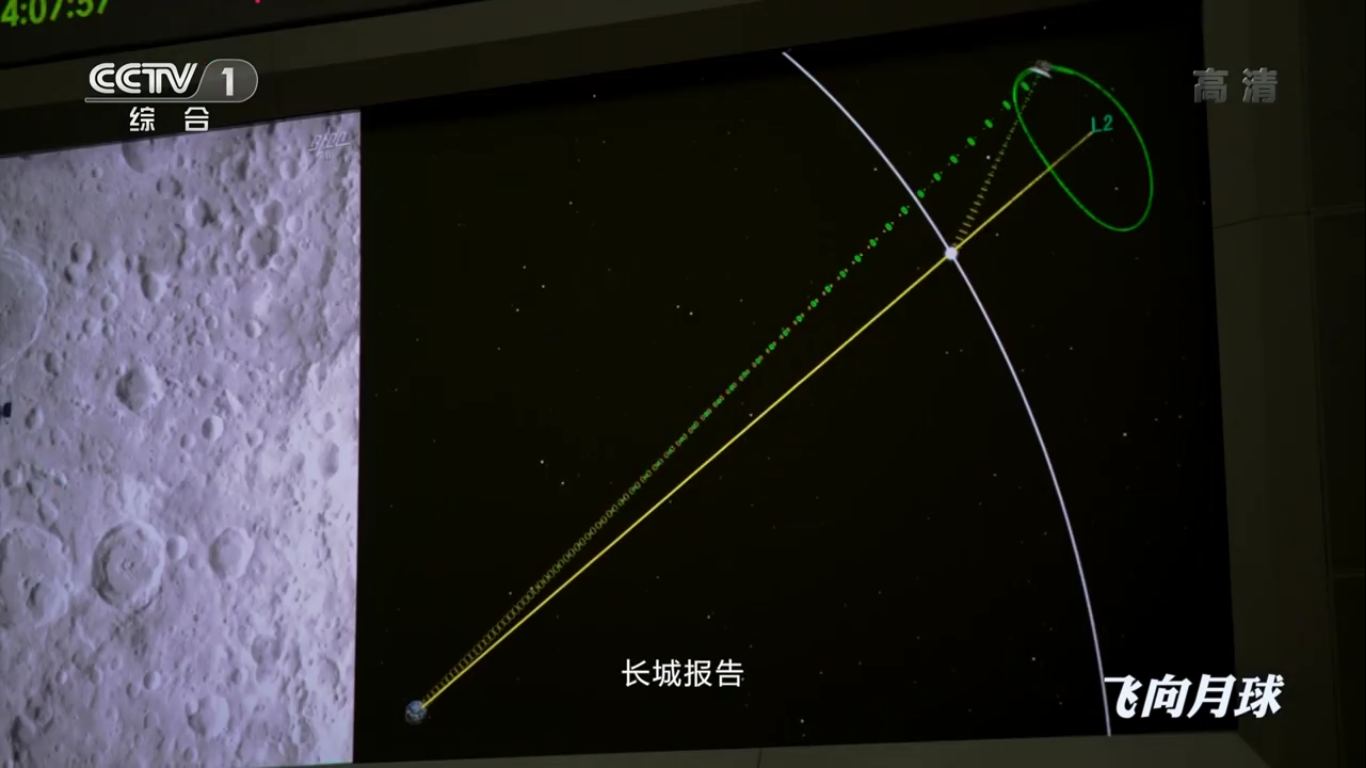
2018年6月14日:Tseyuqiao卫星中继站进入了距月球约65,000公里的地球-月亮系统的Lagrange点L2周围的轨道,成为世界上该轨道的第一颗通信卫星。
2018年12月8日:从中国Sichan航天中心成功发射了带有the娥4号站的长征3B助推火箭。
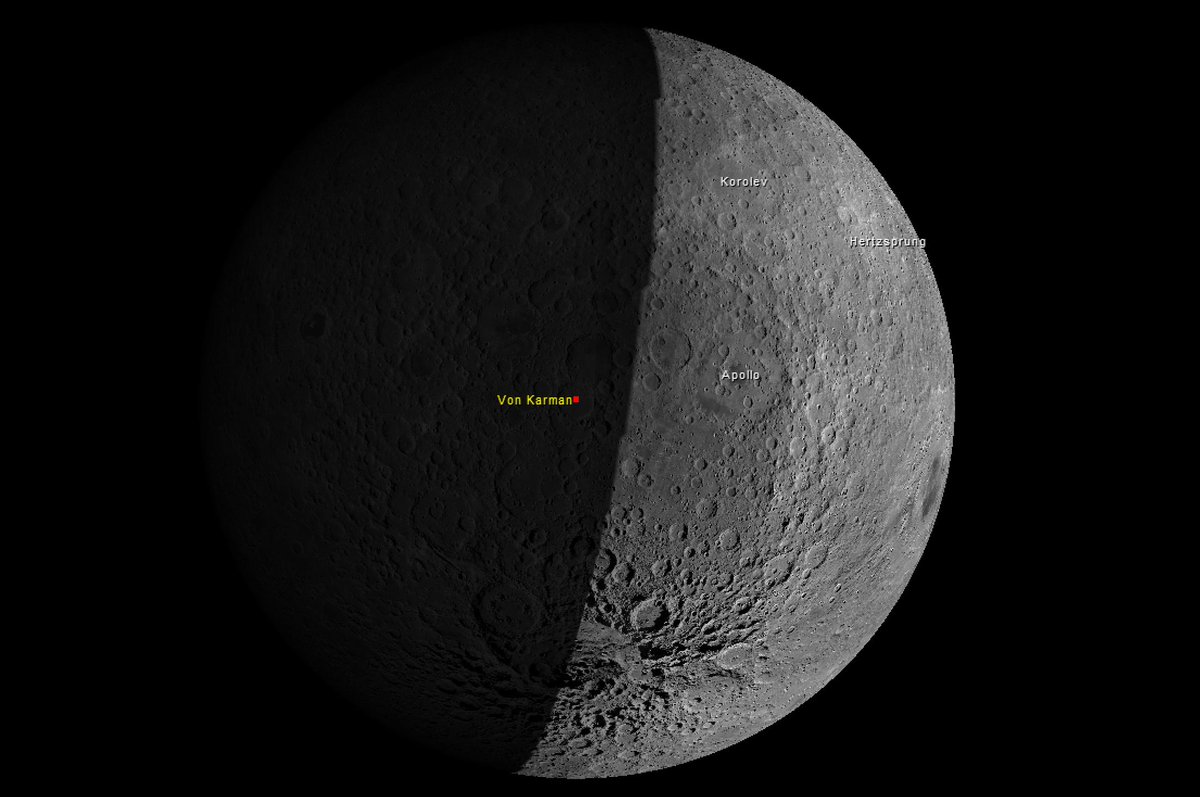
2019年1月3日:Chang娥四号着陆器在月球另一侧的卡曼陨石坑中着陆。 '娥四号着陆器包含第二个中国月球车“雨兔2”,这是“雨兔”流浪者的现代化类似物。 Chang娥四号任务人员现在继续正常运转。
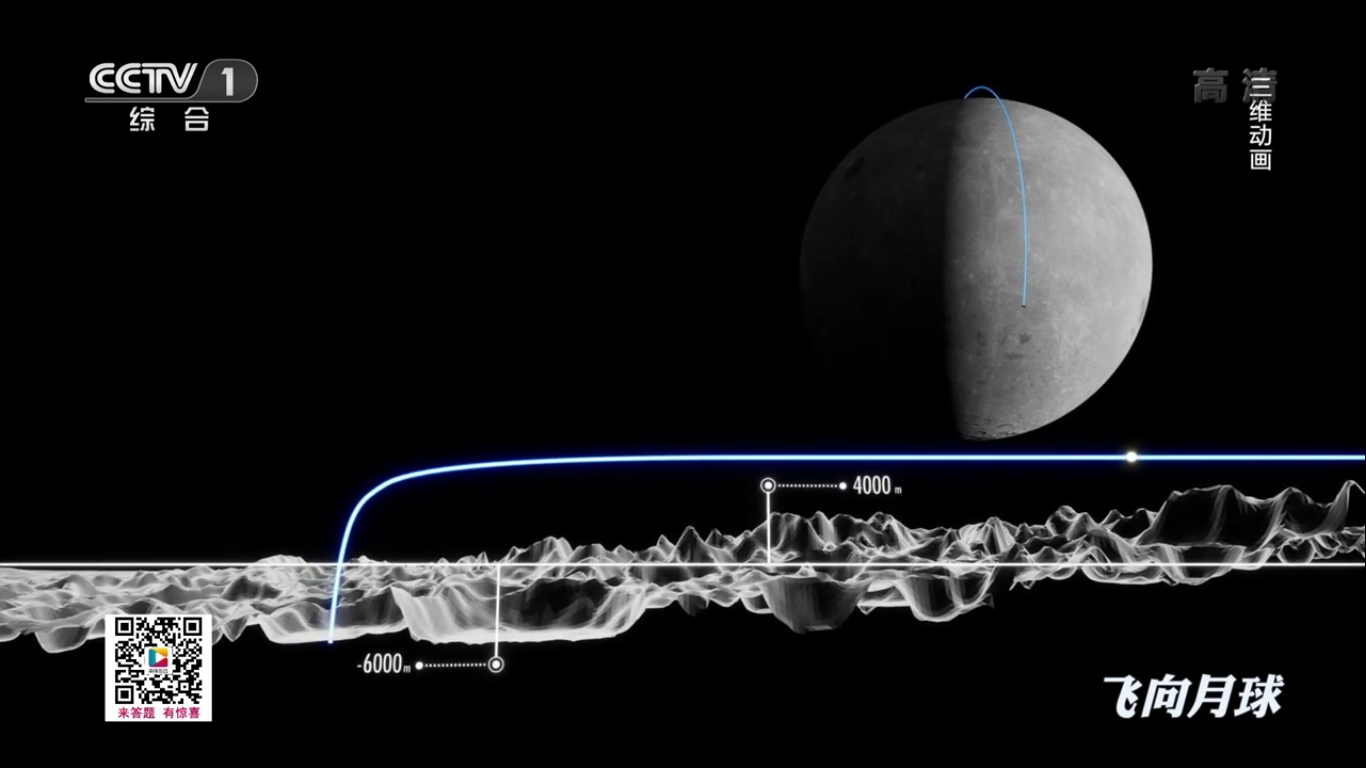
登月过程的视频:
在完成成功的着陆程序的所有阶段并使用e娥四号设备(着陆模块和流动站)安装了独立的通信通道之后,探索月球远端的时代开始了。
月球车“ Yutu-2”下降视频:
漫游车“ Yutu-2”的视频:
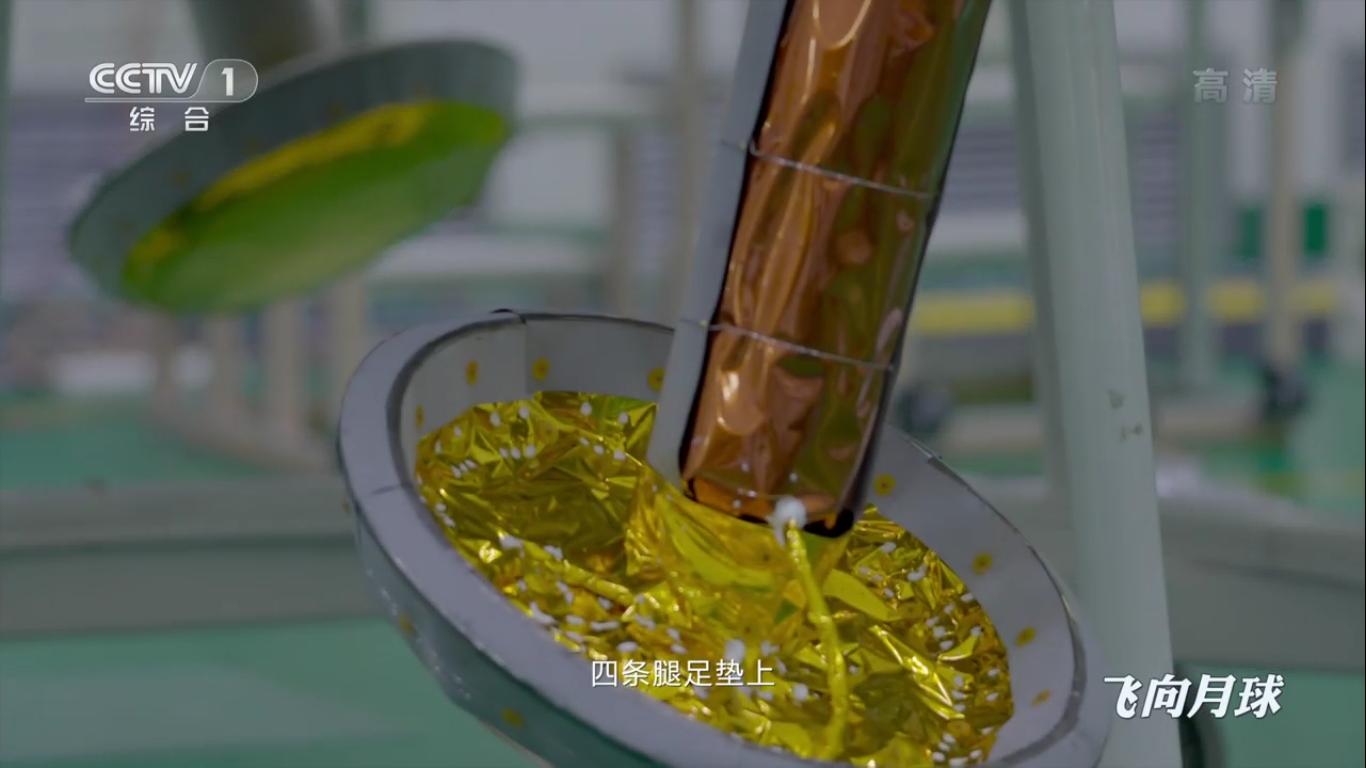
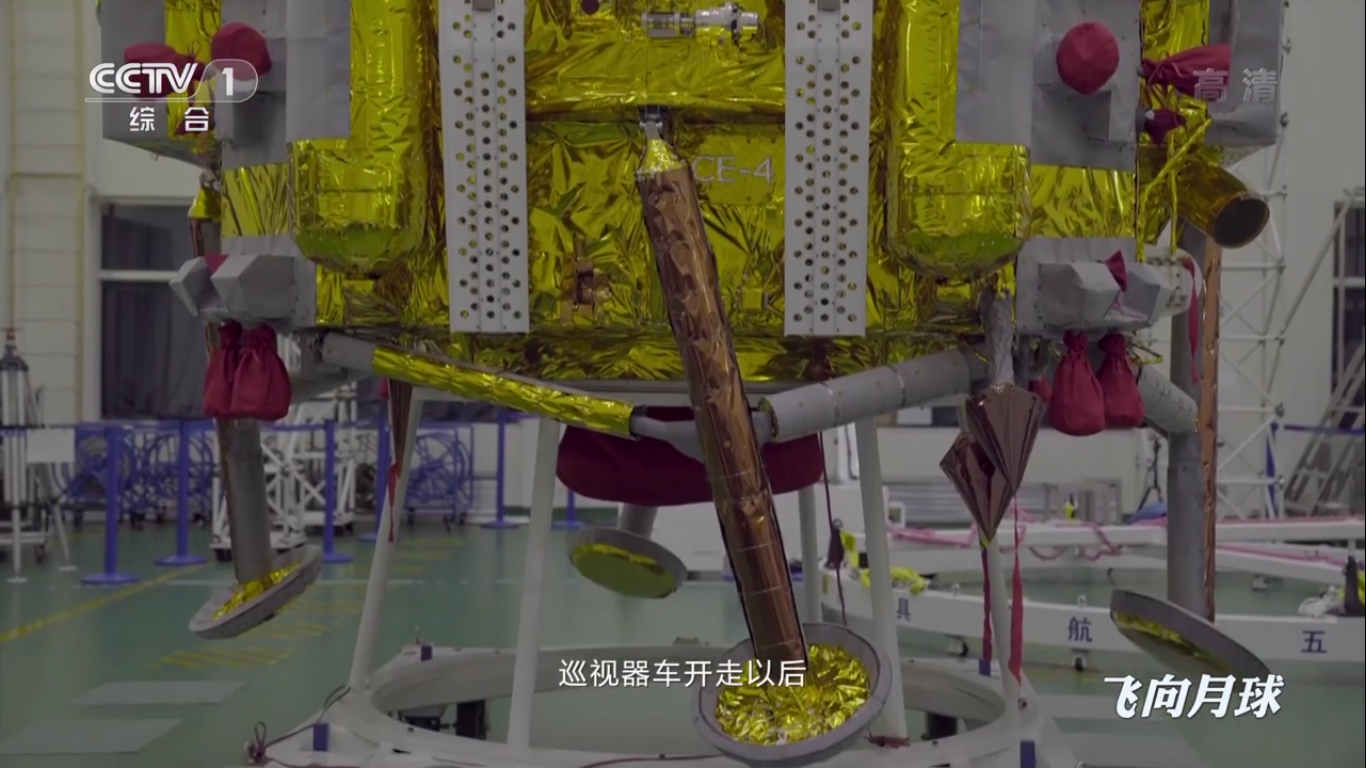
e娥四号下降模块:- 对面着陆支架之间的距离为4.4米,重量1200公斤。
- 工作时间:一地球年。
已安装的设备:
- LFS-低频光谱仪;
- LND-月球着陆器中子和剂量测定法(中子剂量计);
- TCAM-地形相机(风景相机);
- LCAM-着陆相机(着陆相机)。
 流浪者“雨图2”:
流浪者“雨图2”:- 高1米,宽1米(不带太阳能电池板),长1.5米,两个折叠式太阳能电池板,六个轮子;
- 流动站的总重量约为140千克(310磅);
- 负载能力约20公斤(44磅);
- 可以在斜坡上移动并具有自动传感器以防止与其他物体碰撞;
- 流动站通过两个太阳能电池板供电,使流动站在农历期间可以工作;
- 最高时速为每小时200米(月球的速度仍然无法达到,因为地表上的元素将无法提速并损坏流动站);
- 最大研究面积为3平方米。 km;
- 预计运行时间为3个月(2160小时),说明流动站已超过使用寿命;
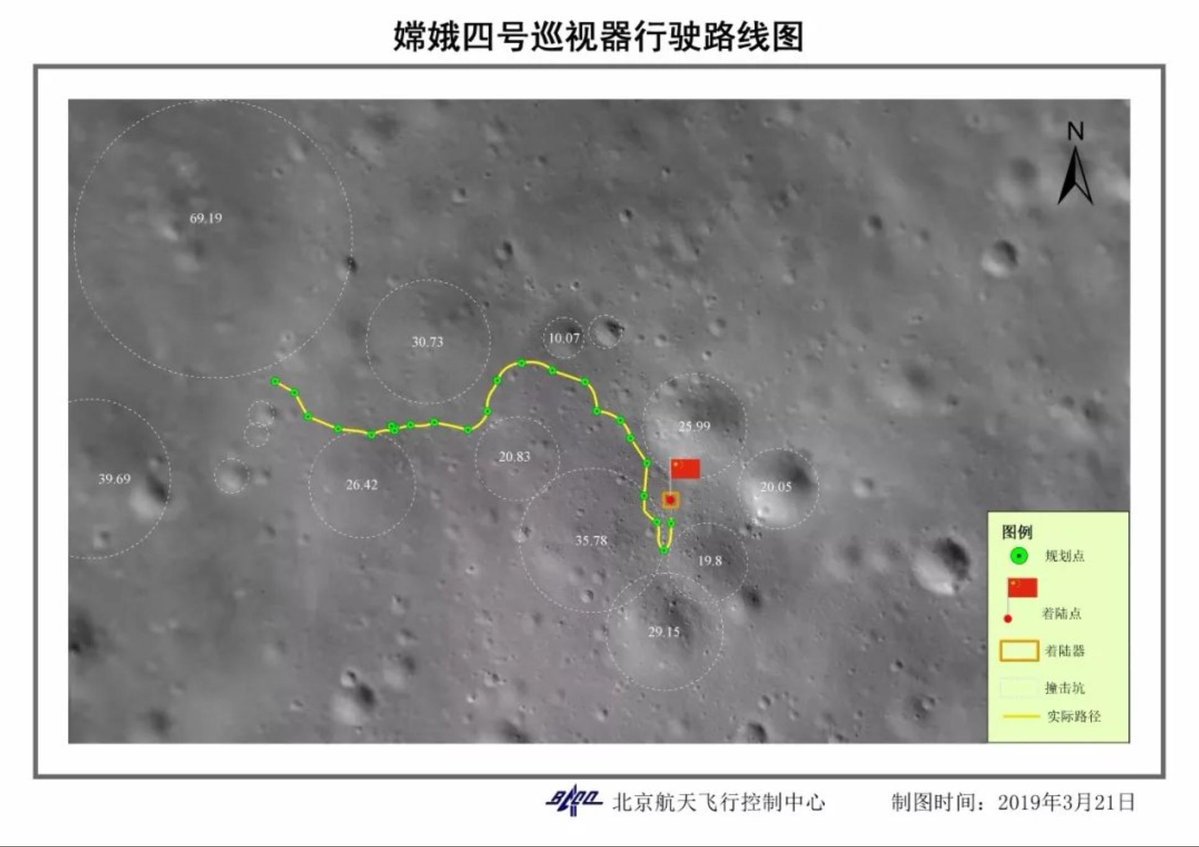
- 最大估计距离为10 km,现在在五个月内沿月球表面经过了178.9米(月球另一边的漫游车中排名第一,所有月球漫游车中排名第六), 此处给出了漫游车距离表 ;
- 控制模式:自动(绕开小障碍物),手动(主)-操作员从地球进行控制。
已安装的设备:
- LPR-月球穿透雷达;
- ASAN-中性粒子高级小型分析仪(中性粒子小型分析仪);
- VNIS-可见和近红外成像光谱仪(红外光谱仪);
- PCAM-全景相机(双全景相机)。
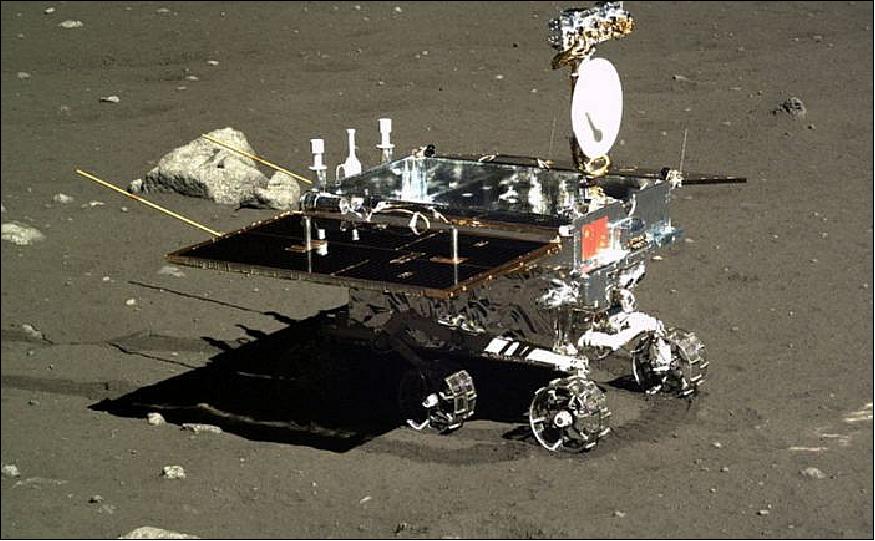
地球上的照片漫游车:



Tseyuqiao卫星中继站(四十桥)于2018年5月21日发射,在一个特别引力稳定的拉格朗日点Earth-Moon L2周围的晕圈轨道上运行,它可以随时保持对地球和月球背面的直接可见性用于MCC与the娥四号项目模块之间的数据交换。
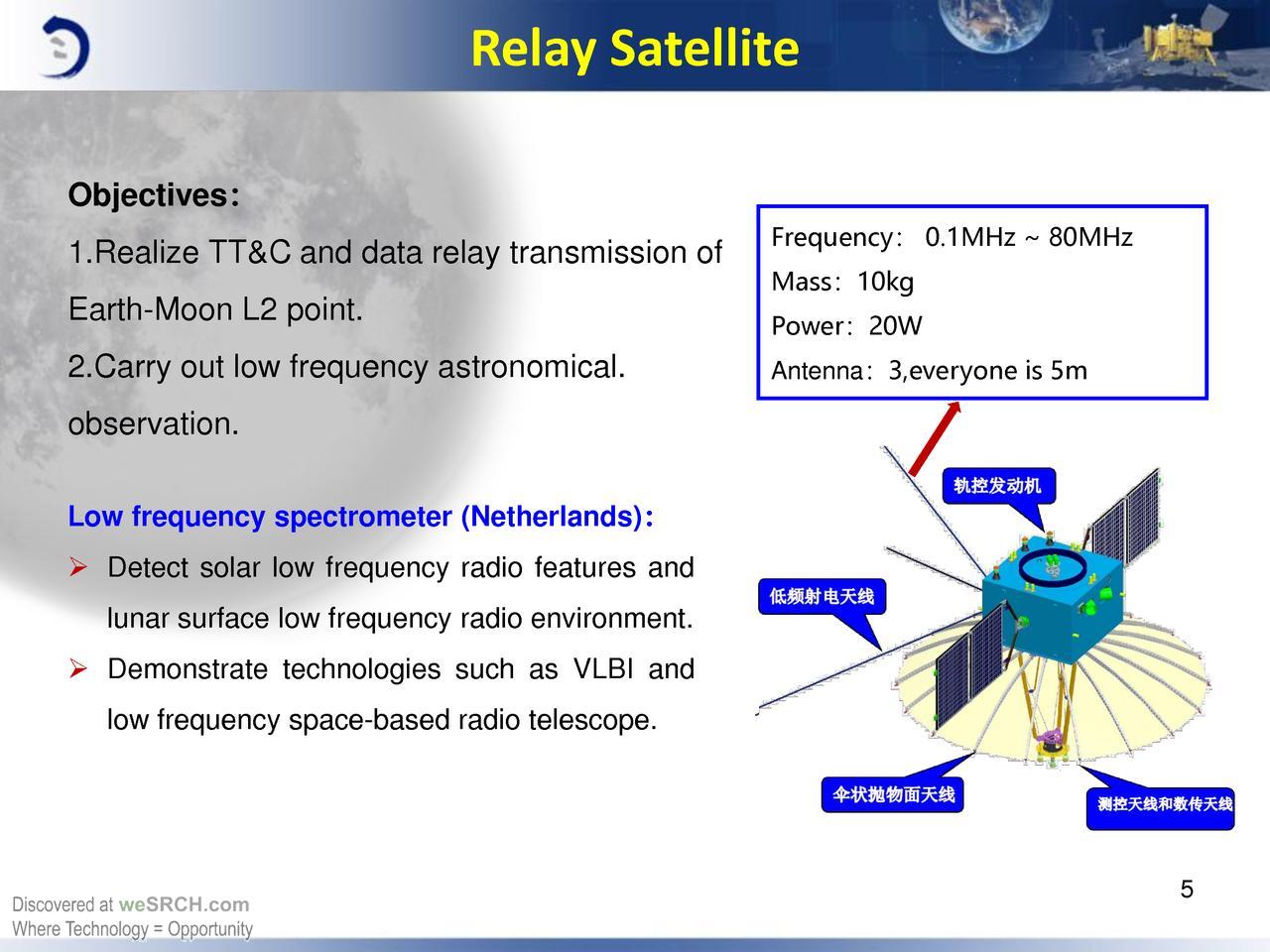
此外,在Tseyuqiao转发器卫星上安装了带有三个五米长天线的低频光谱仪(中继LFS),记录了来自早期宇宙的低频无线电发射,这使得研究其结构成为可能。
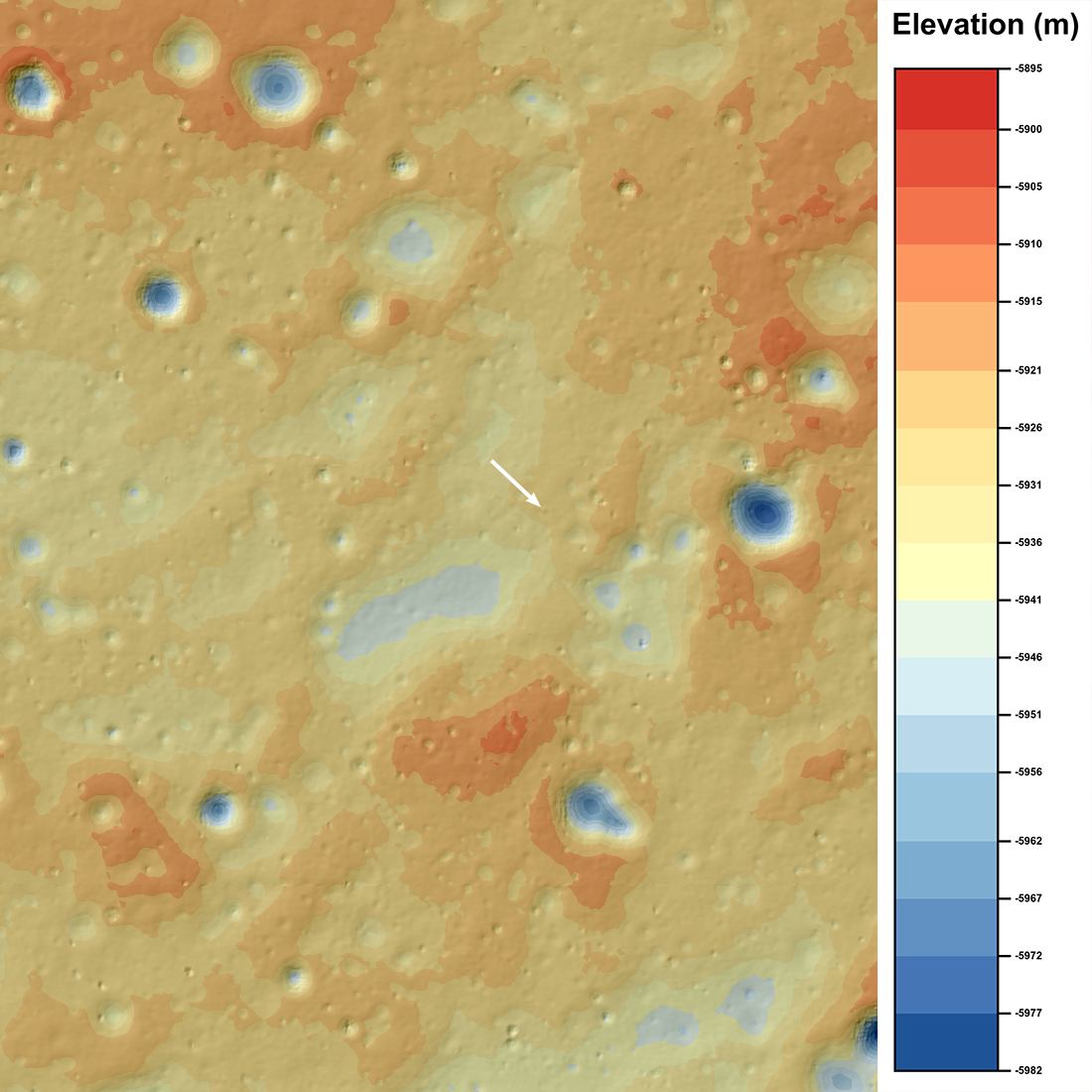
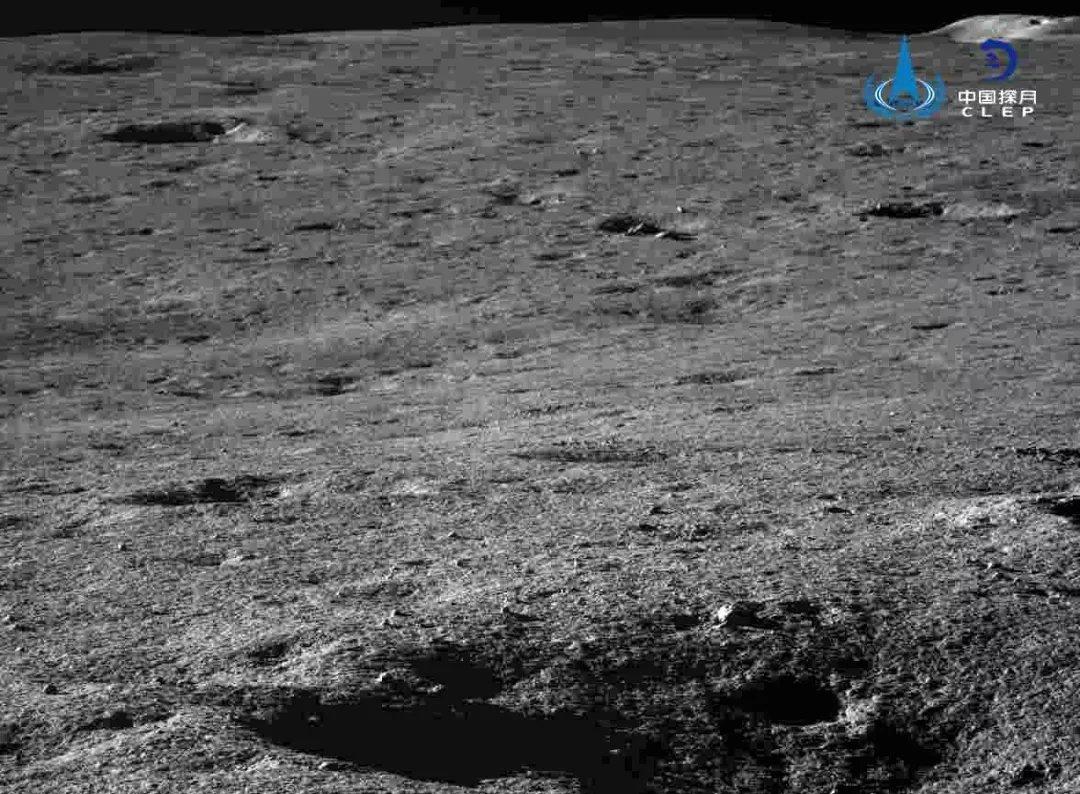
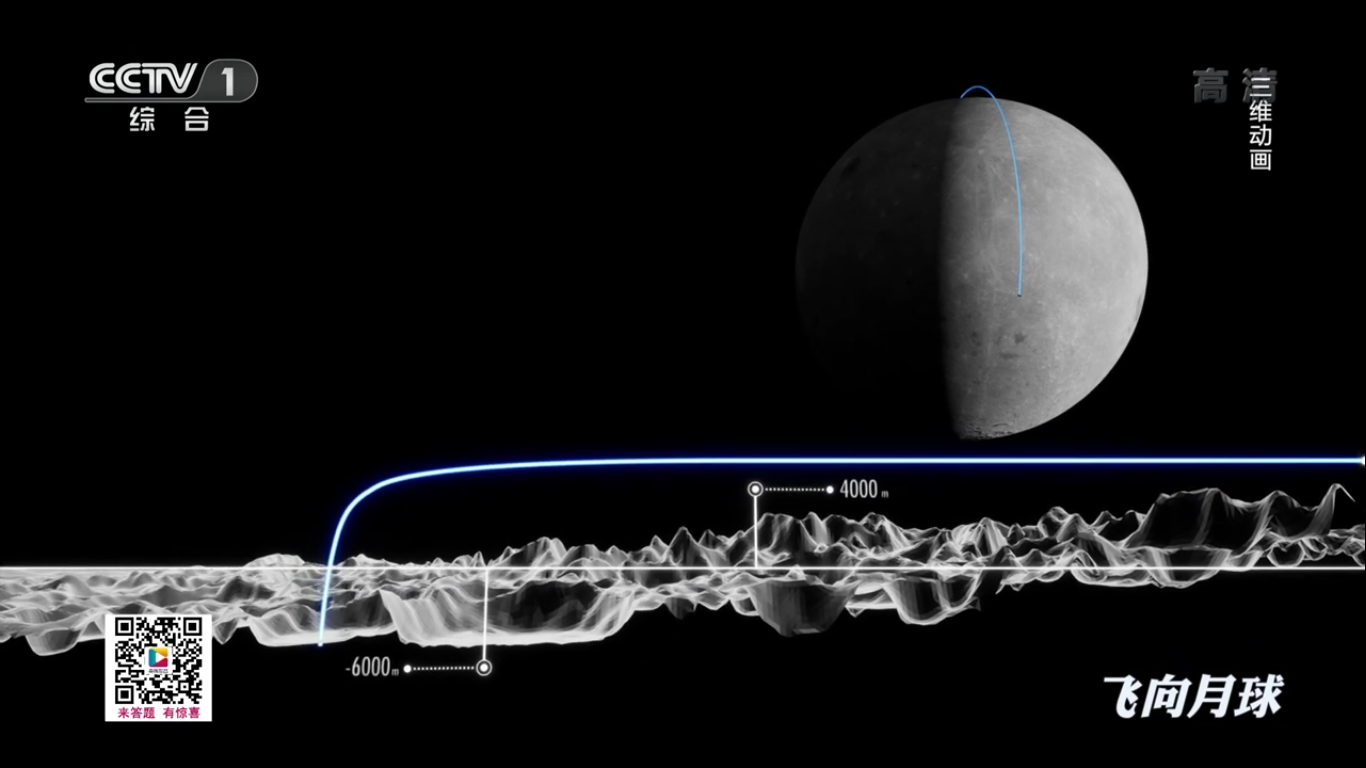
月亮的背面比从地球上看到的侧面更为复杂。 '娥四号着陆舱着陆区的月球表面充满褶皱,许多卵石和小火山口。
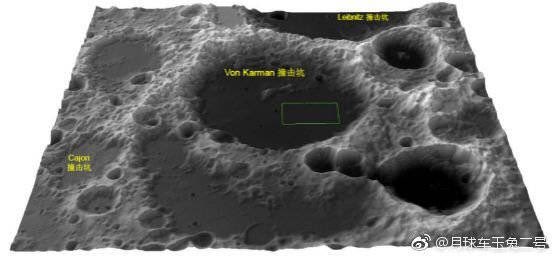
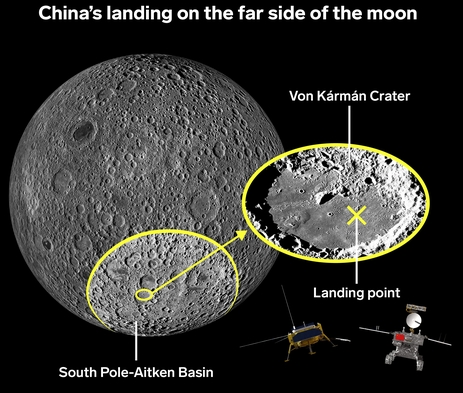
'娥4号下降组件的月球远端的陨石坑着陆区的地形照片(由美国宇航局LRO探测器制成):
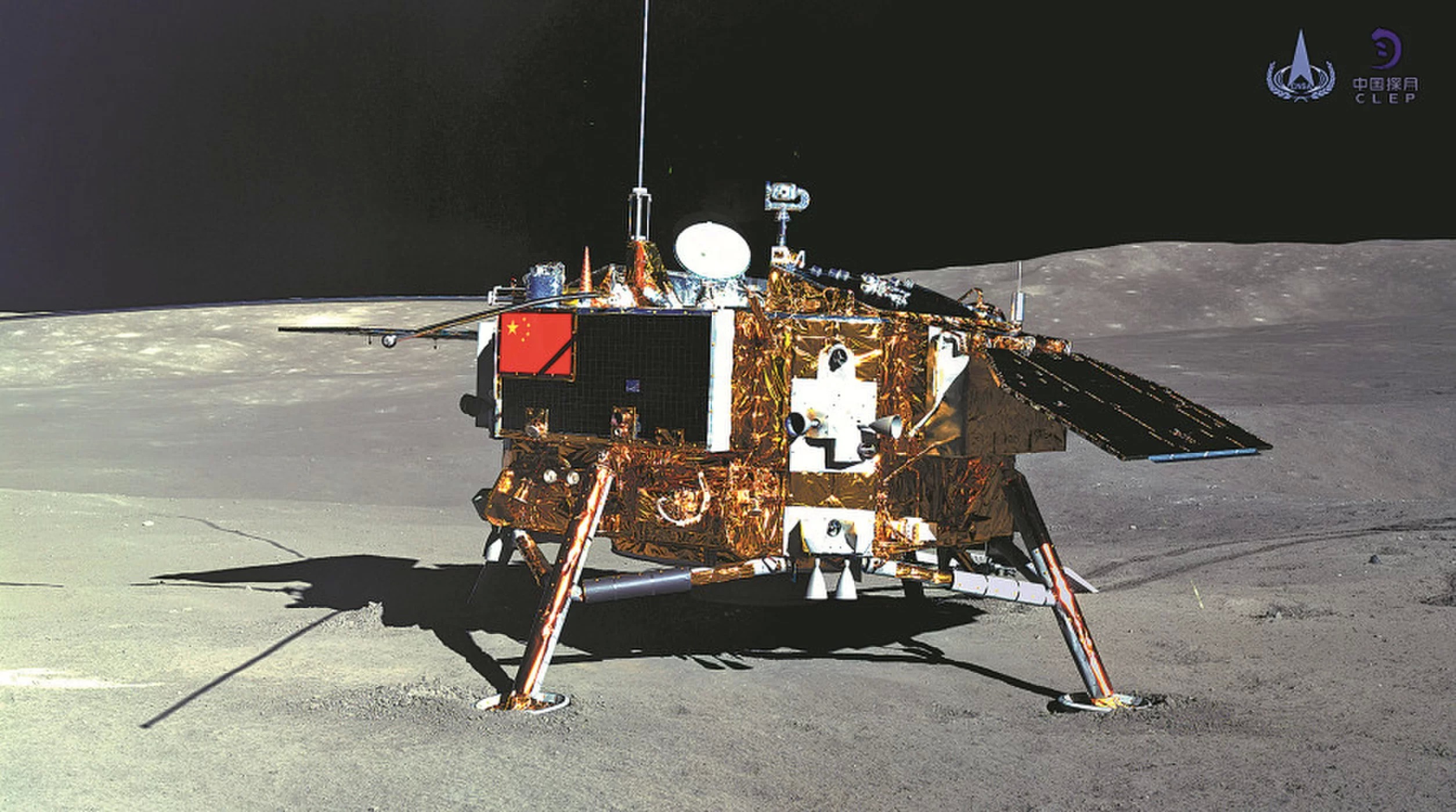
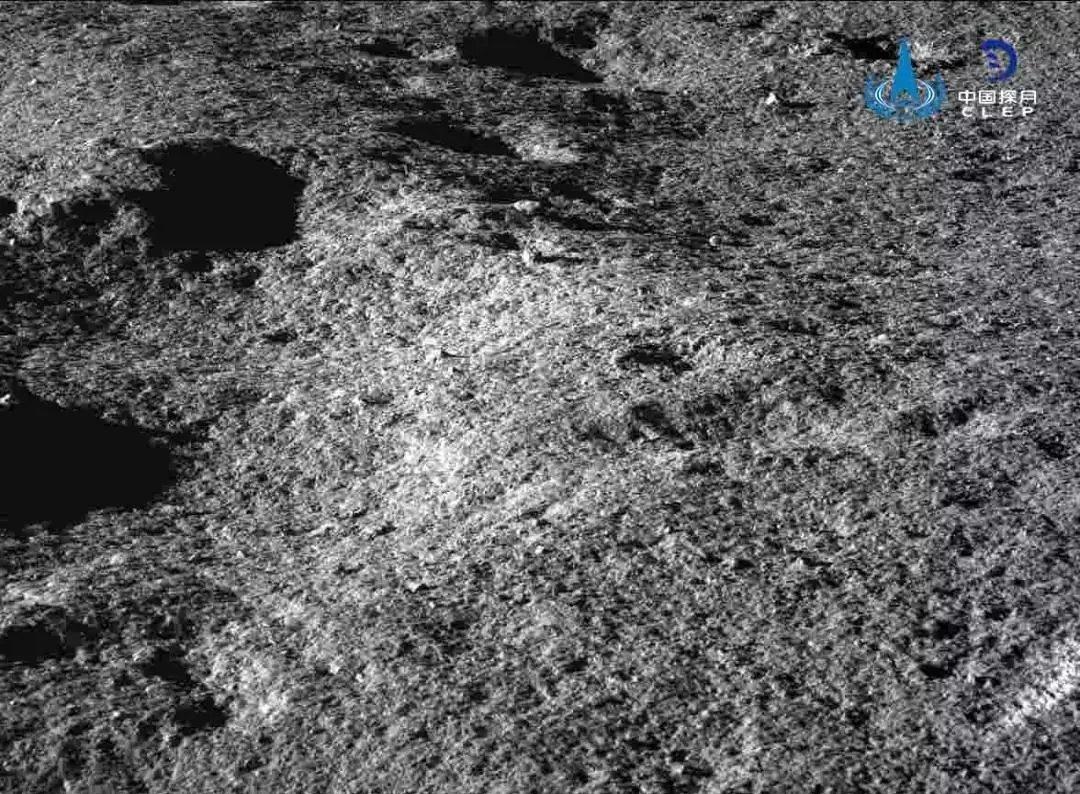
 the娥四号着陆模块和Yutu-2漫游车的相机拍摄的月球表面新照片。
the娥四号着陆模块和Yutu-2漫游车的相机拍摄的月球表面新照片。非常寂寞的Chang娥四号登陆模块:

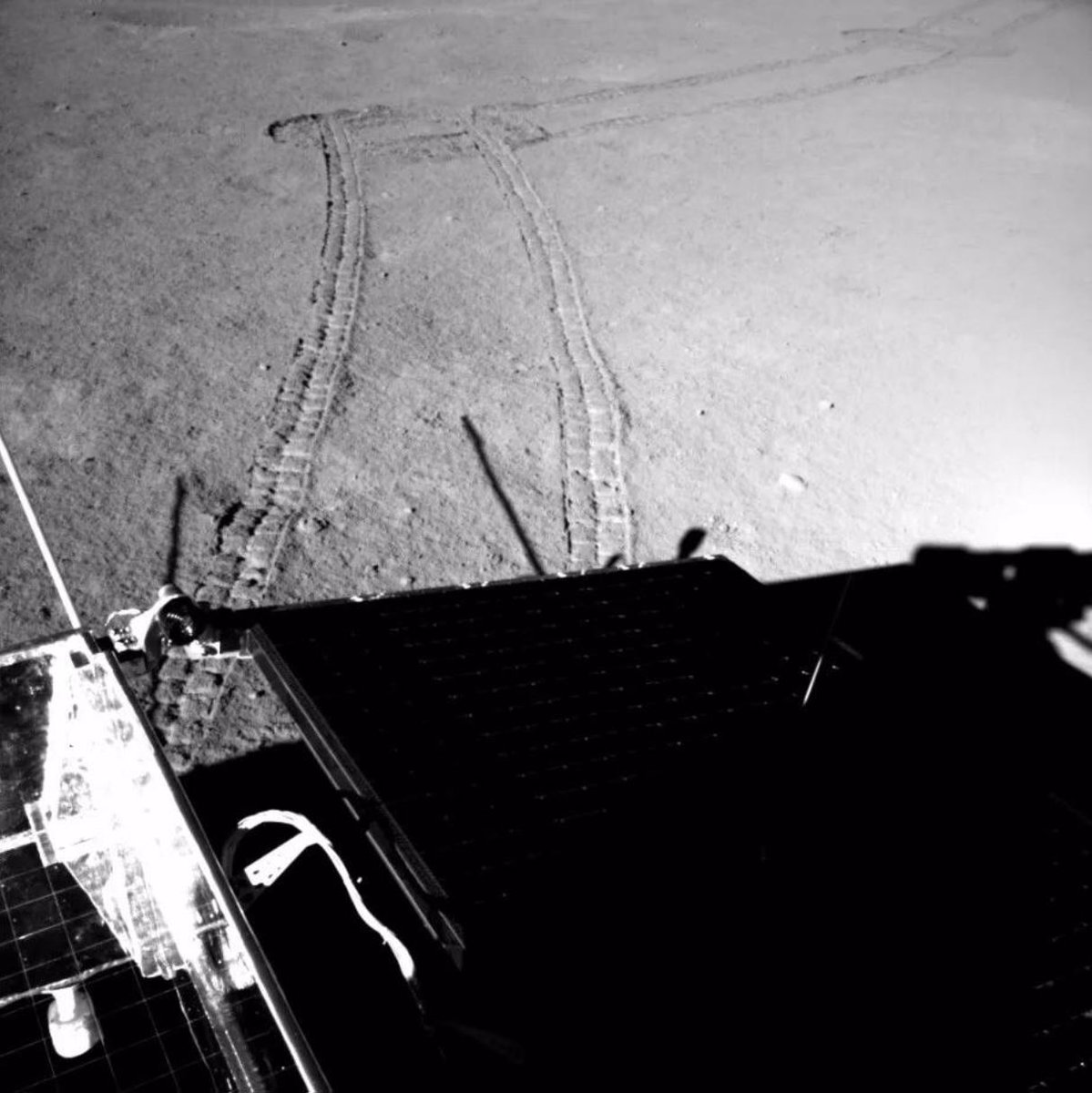
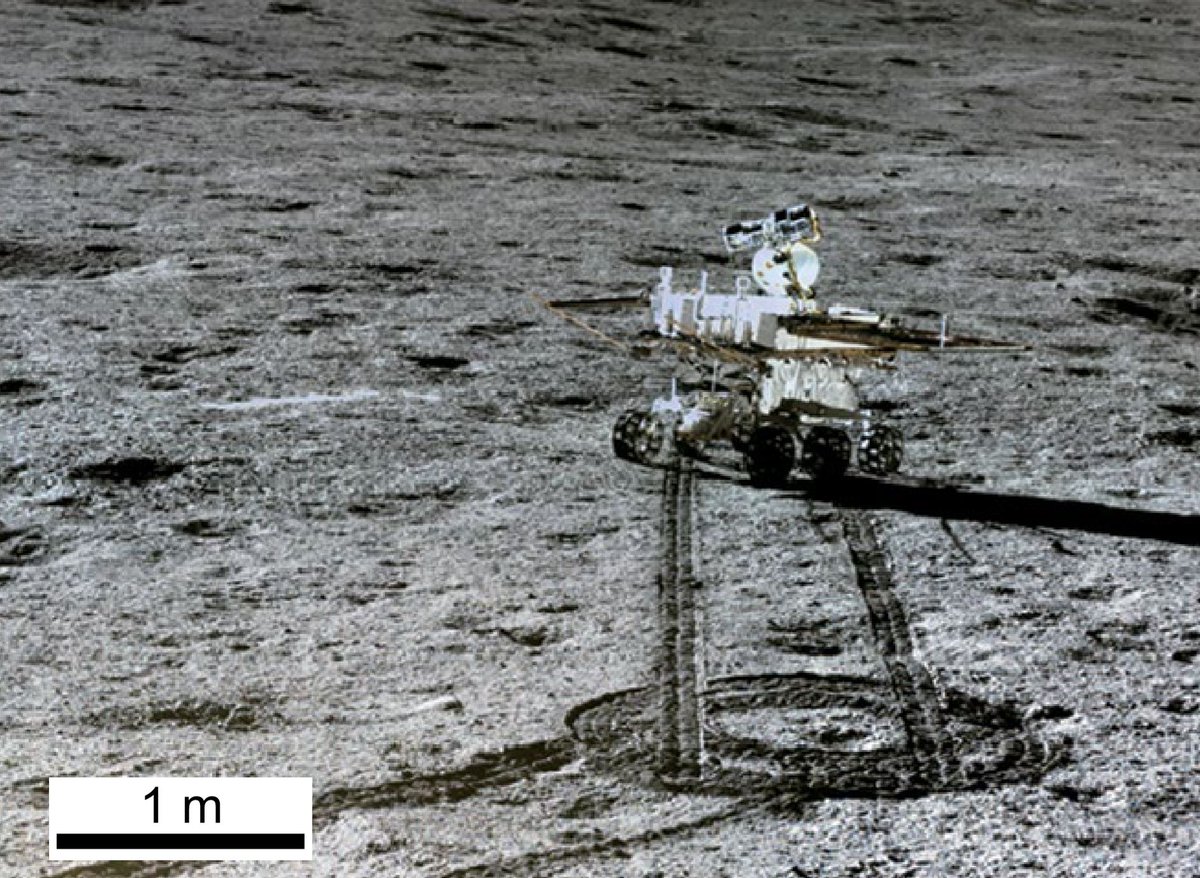
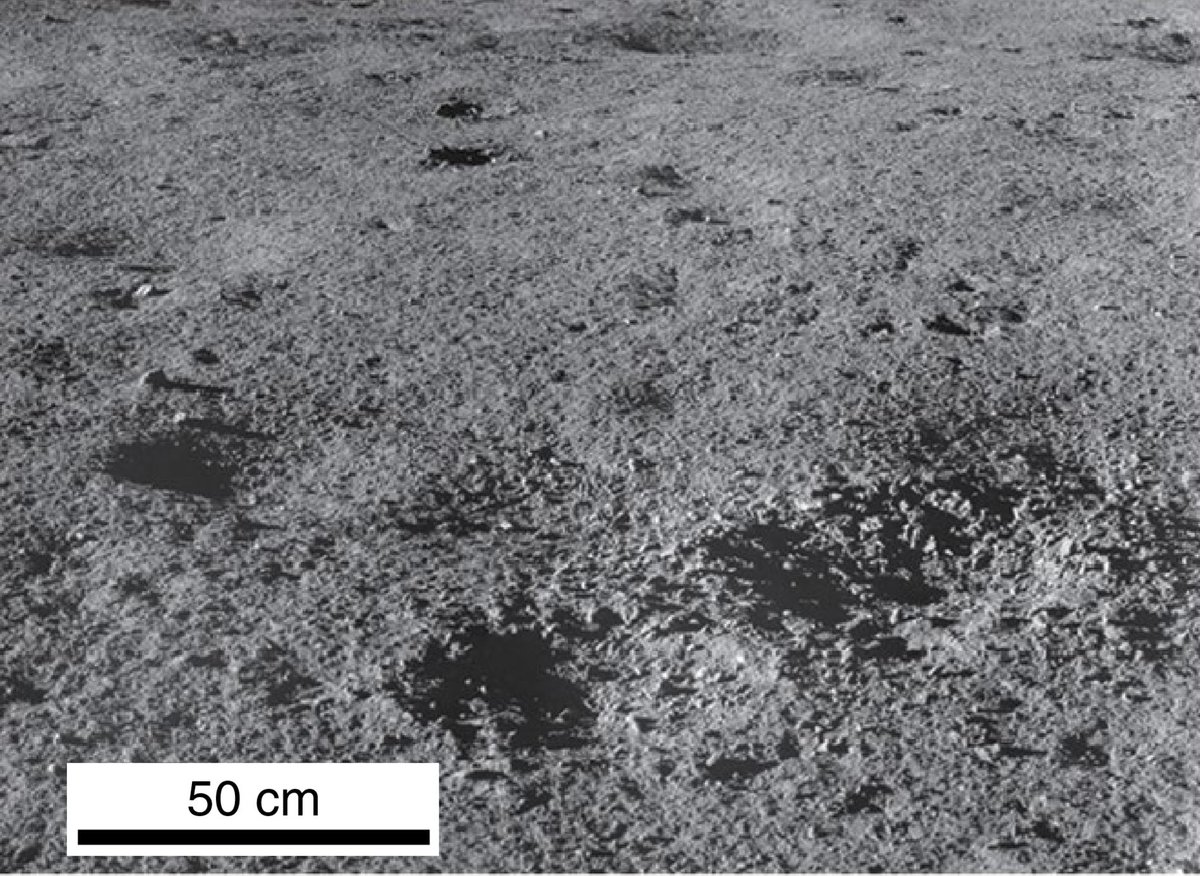
Yutu-2漫游者的踪迹。:

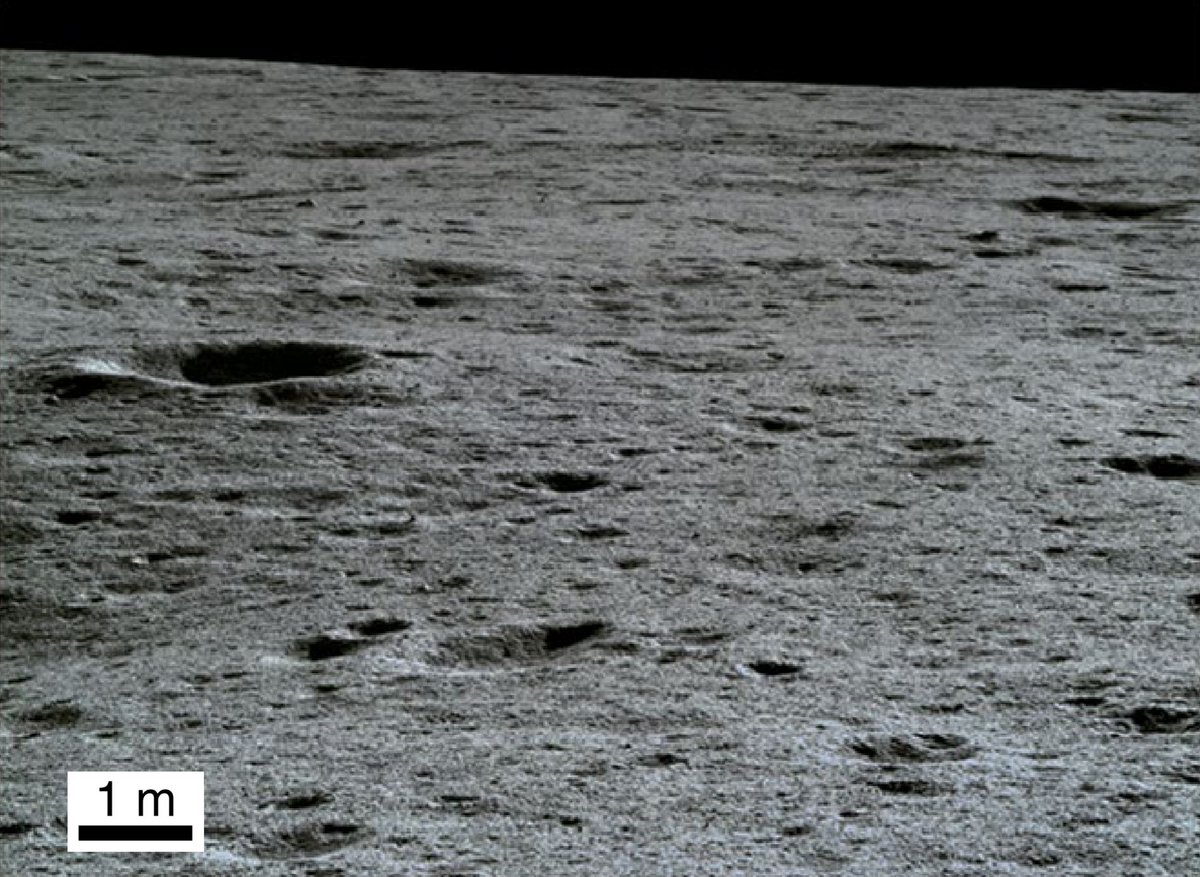
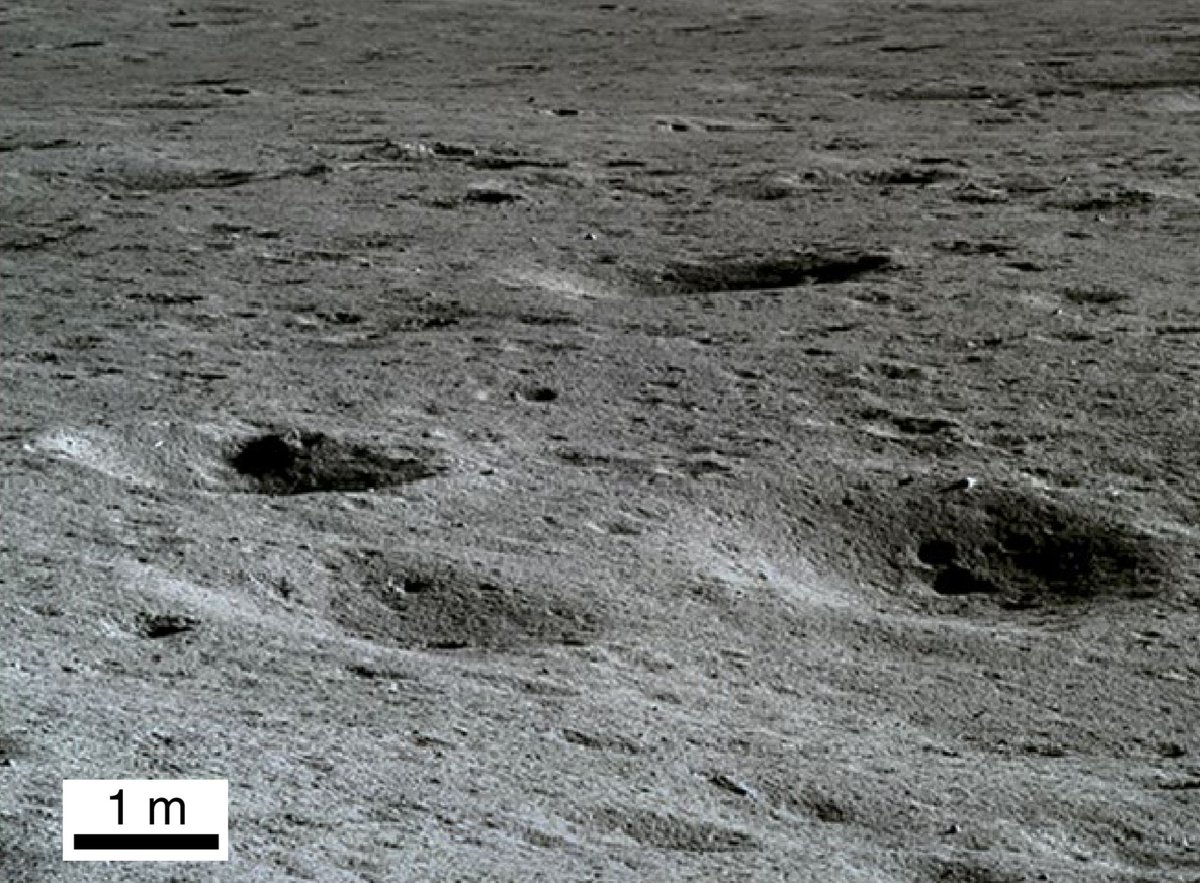
月球背面:



 以前发送给地球的月球背面照片:
以前发送给地球的月球背面照片:带有全景摄影机的Yutu-2漫游车车轮的月球轨迹和天线和平台的阴影:

几个火山口(带有美丽的阴影)和山脉在背景中:

这些是《自然地球科学》四月号科学文章“ Chang娥四号将探索的月球远端”的照片。

着陆点附近的小环形山:
漫游者“玉图2号”探索月球表面:
小陨石坑中的石头碎片(来自Yutu-2漫游者的照片):
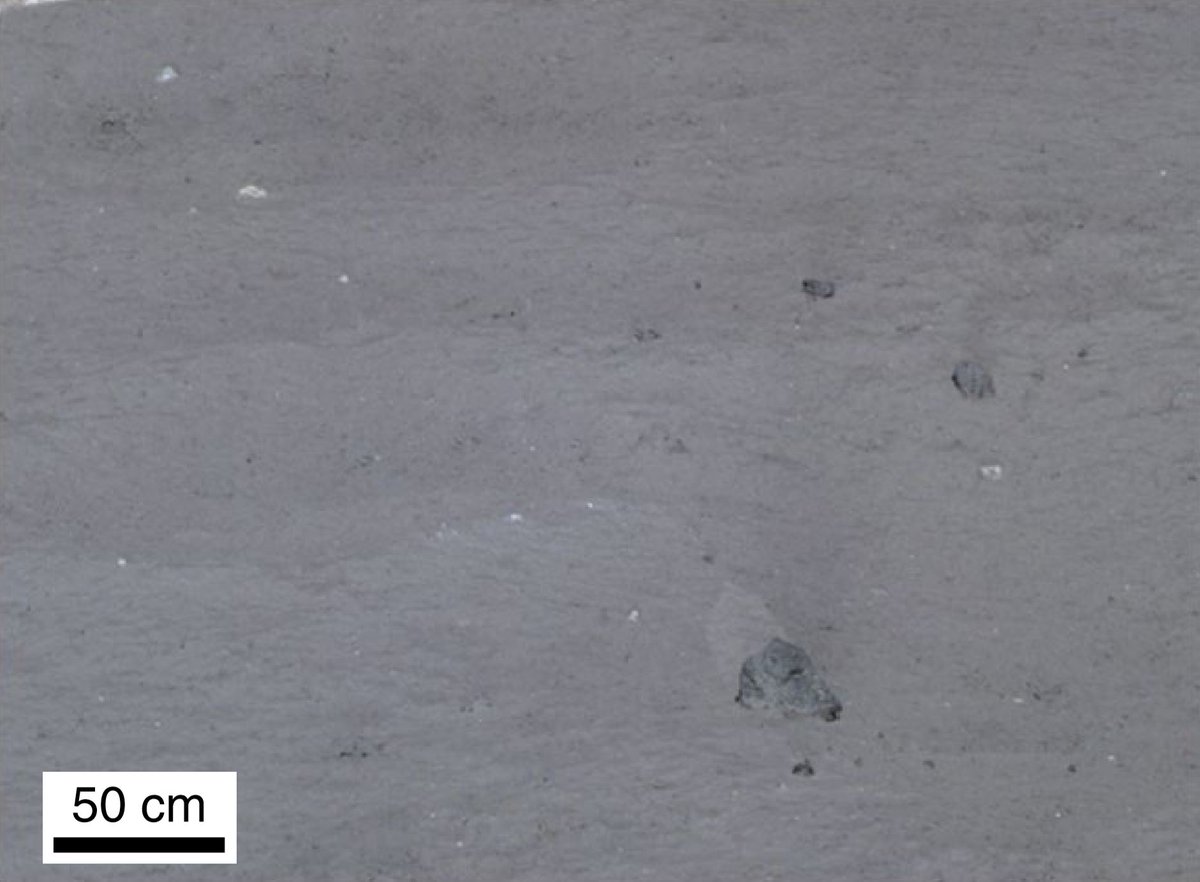
Yutu-2漫游车上的小石头:

着陆点附近非常不寻常的黑石头:
 相机拍摄的照片:Chang娥四号项目历史上的新时刻
相机拍摄的照片:Chang娥四号项目历史上的新时刻2018年12月8日:载有有效载荷的长征3B运载火箭(hang娥4站)成功从Sichan中国航天器发射升空。
长征3B运载火箭的发射:



倒计时完成:






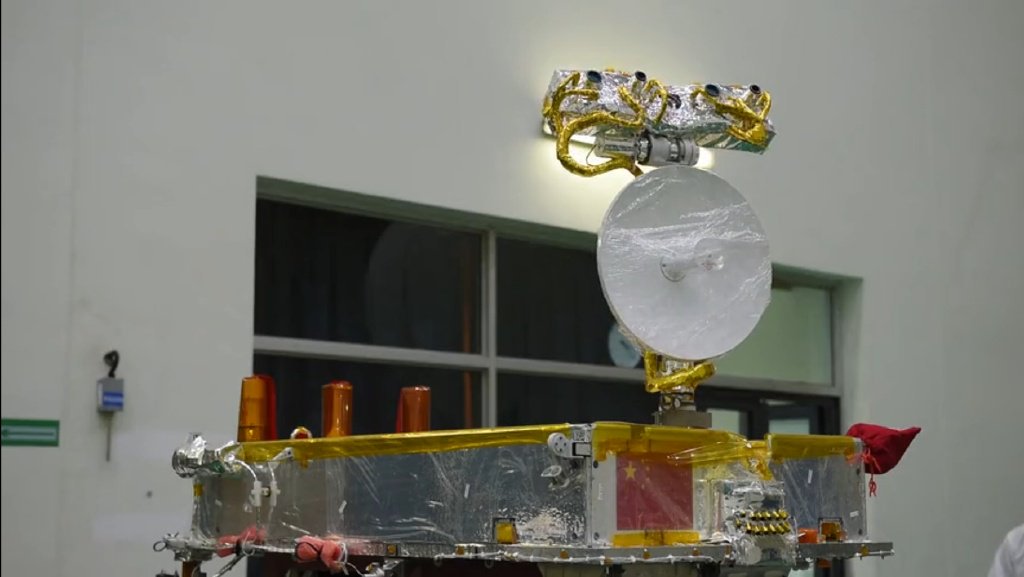
有效载荷部:

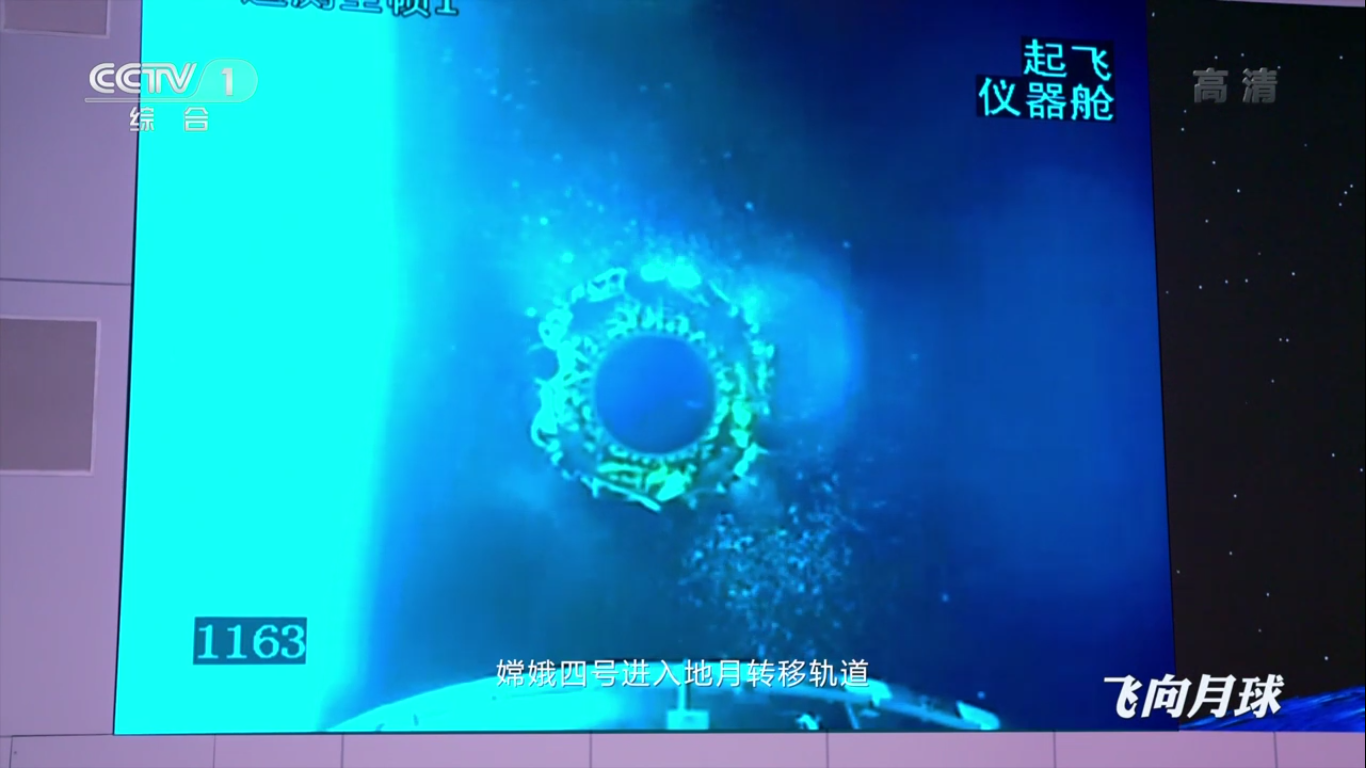
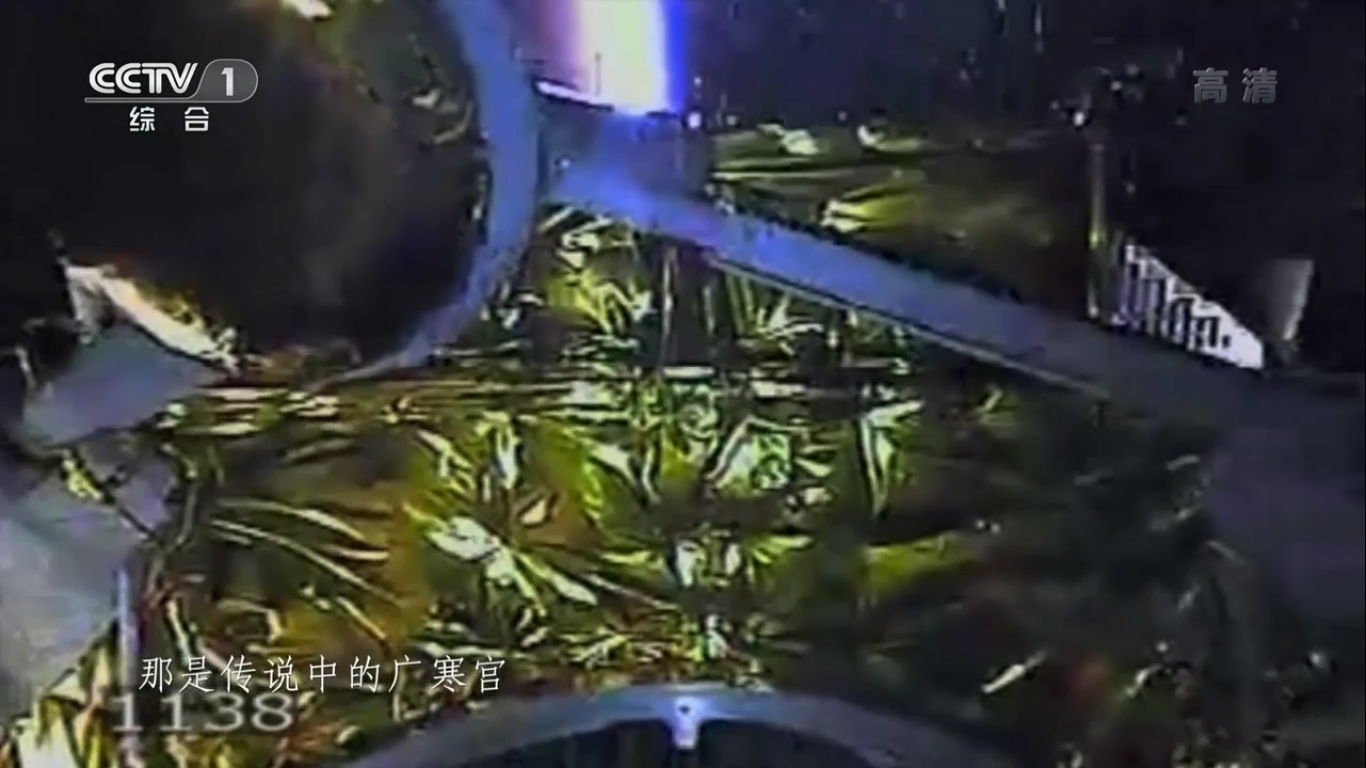
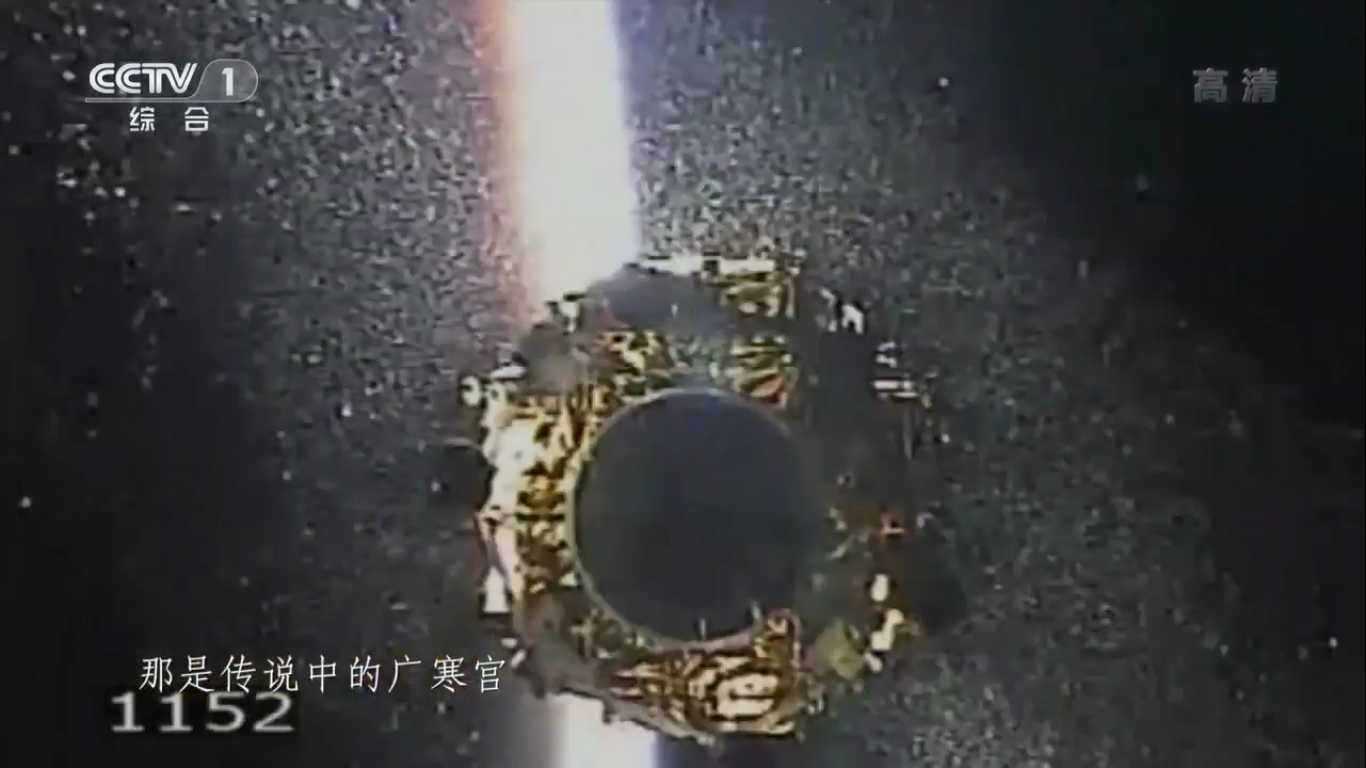

有效载荷定位已位于太空中:

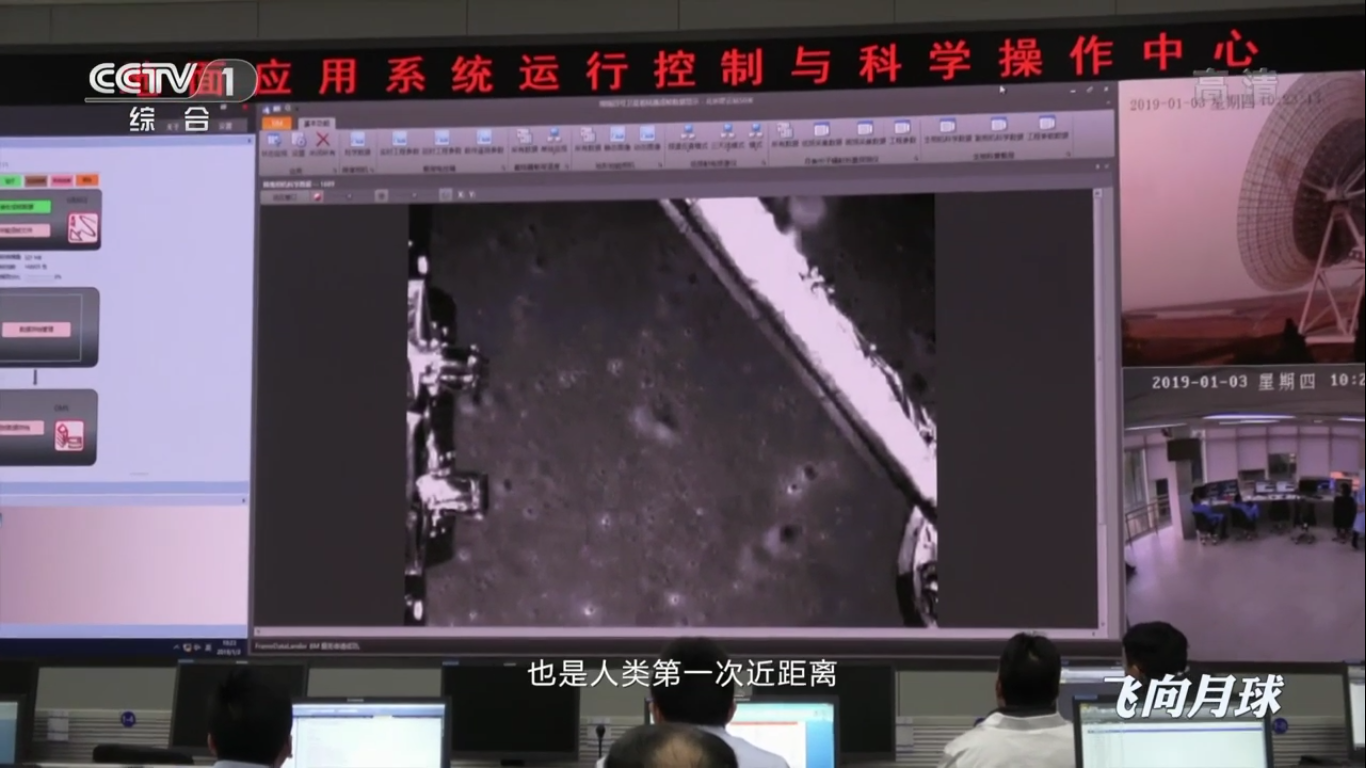
2019年1月3日:Chang娥四号着陆器在月球另一侧的卡曼陨石坑中着陆。

在中国空间技术研究院的飞行控制中心:



张鹤-'娥四号项目执行董事在他的帖子中:

有趣的图标:




在太空通讯中心:

准备着陆:
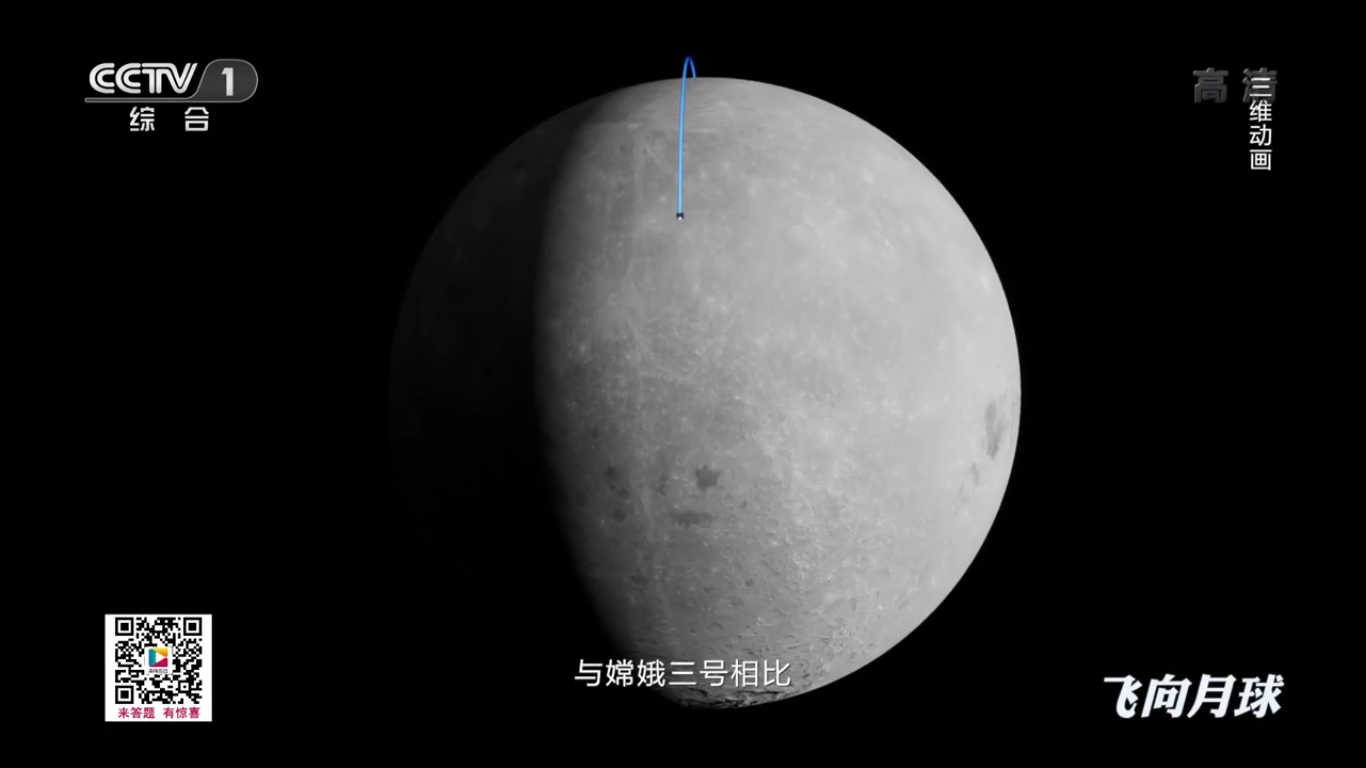
着陆点“需要抓住”非常小心:




一些操作员没有键盘:


着陆过程:

中继卫星通信:


有一个着陆点:



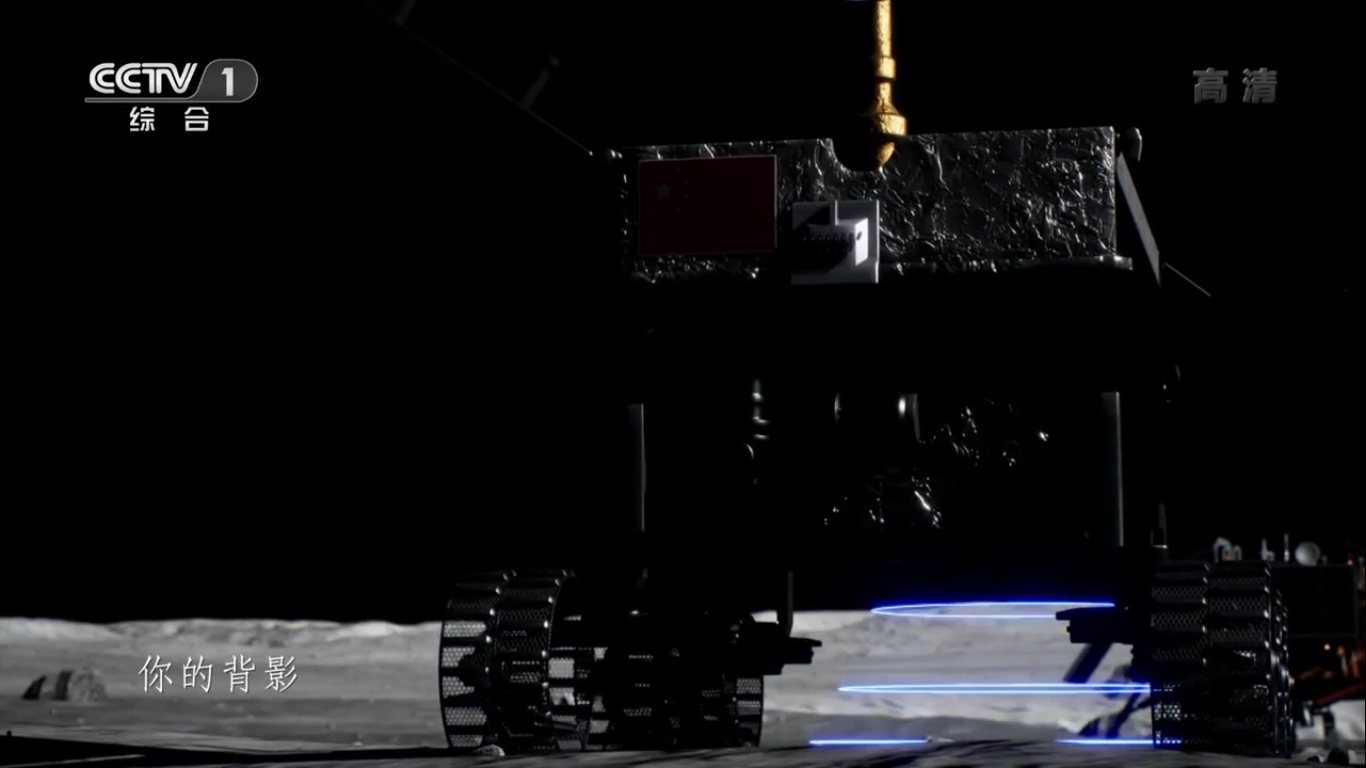
准备启动流动站:


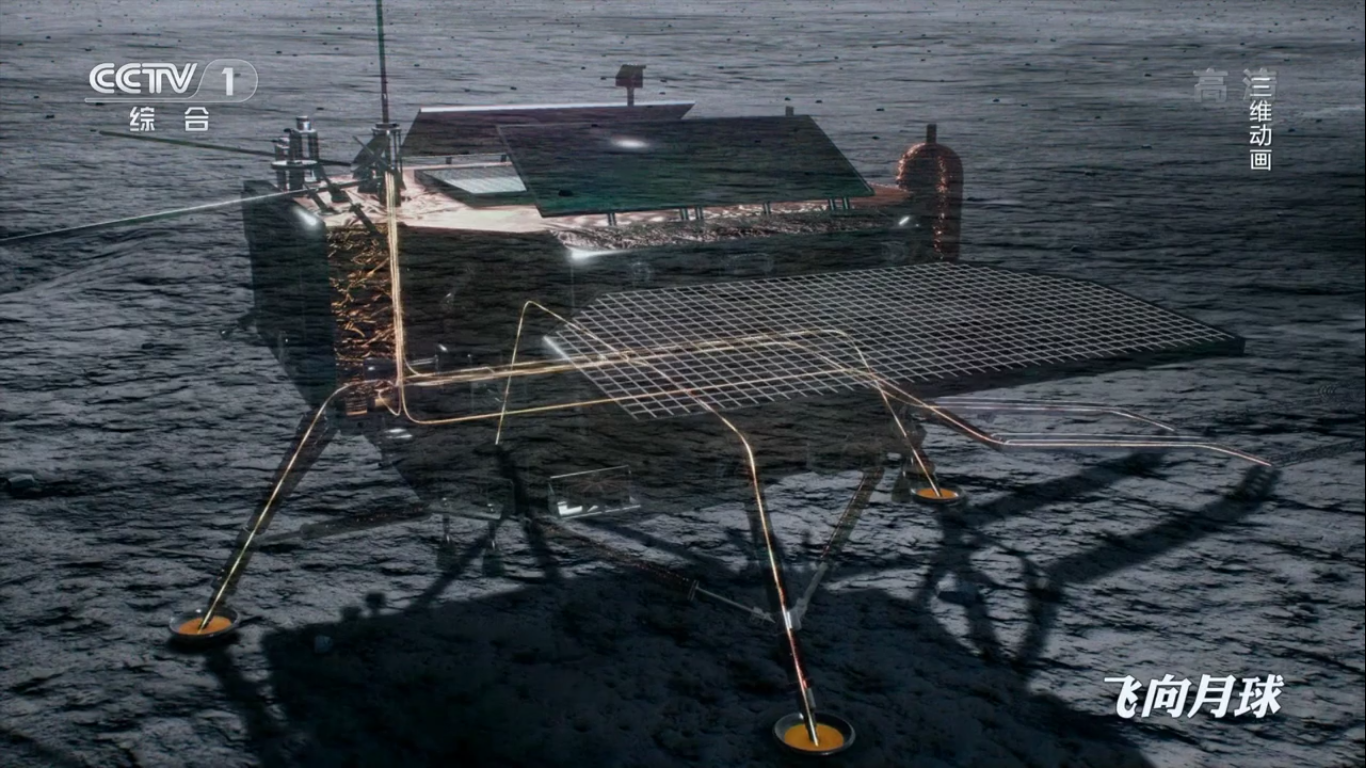
'娥四号下降模块的每个着陆支架都有一个表面接触传感器,在月光下工作的温度传感器(在月球表面记录数据)也内置在支架和流动站的发射坡道中。
根据the娥四号模块的传感器,夜间月球表面的温度下降(最低)至零下190摄氏度。




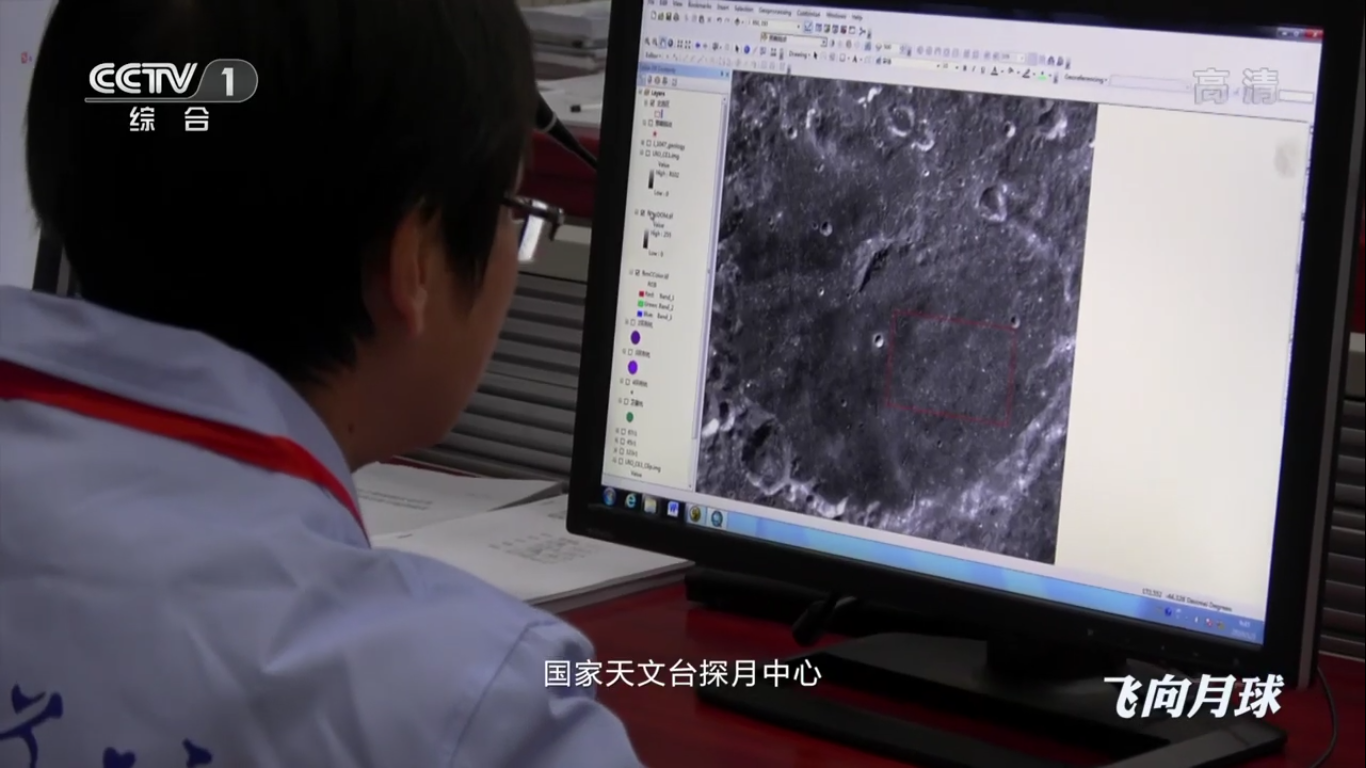
在空间通信中心中接收和处理数据:

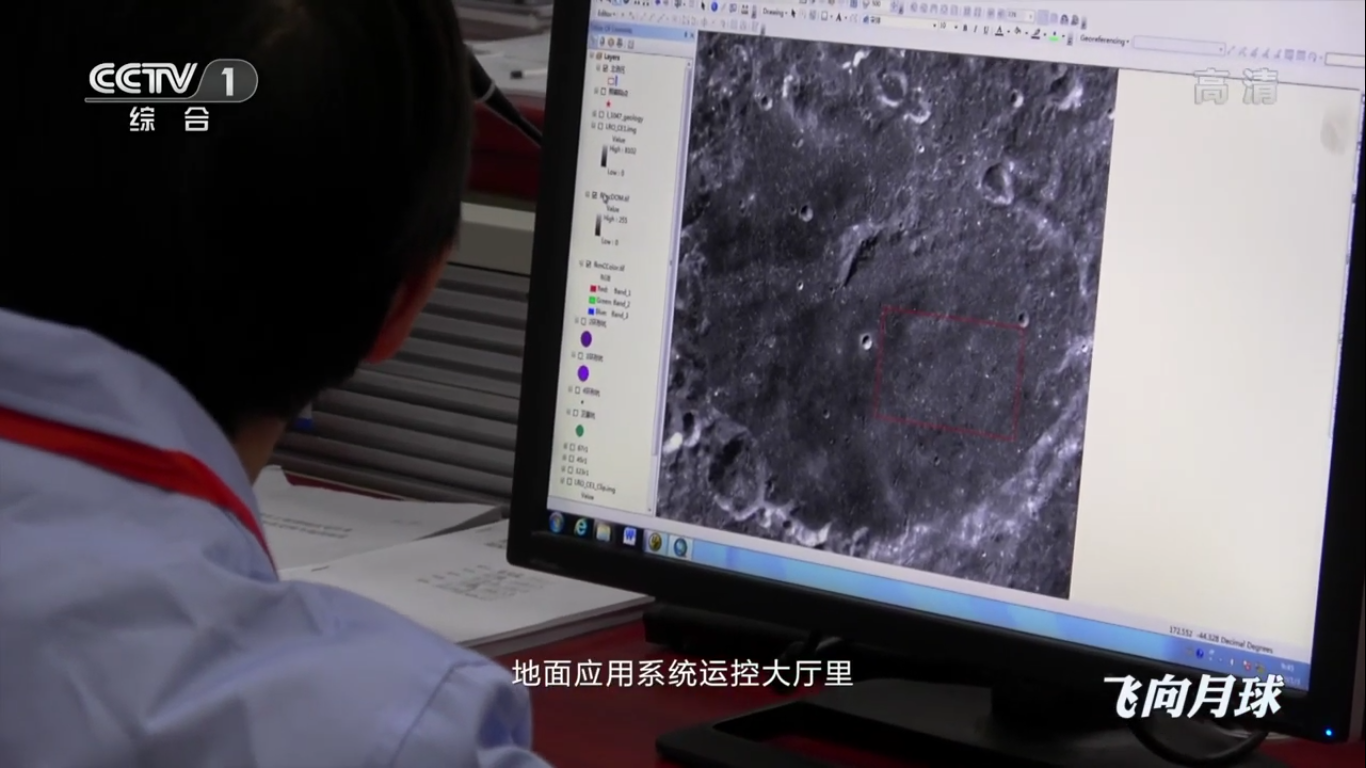
Yutu-2流浪者操作员依靠其虚拟表面图:

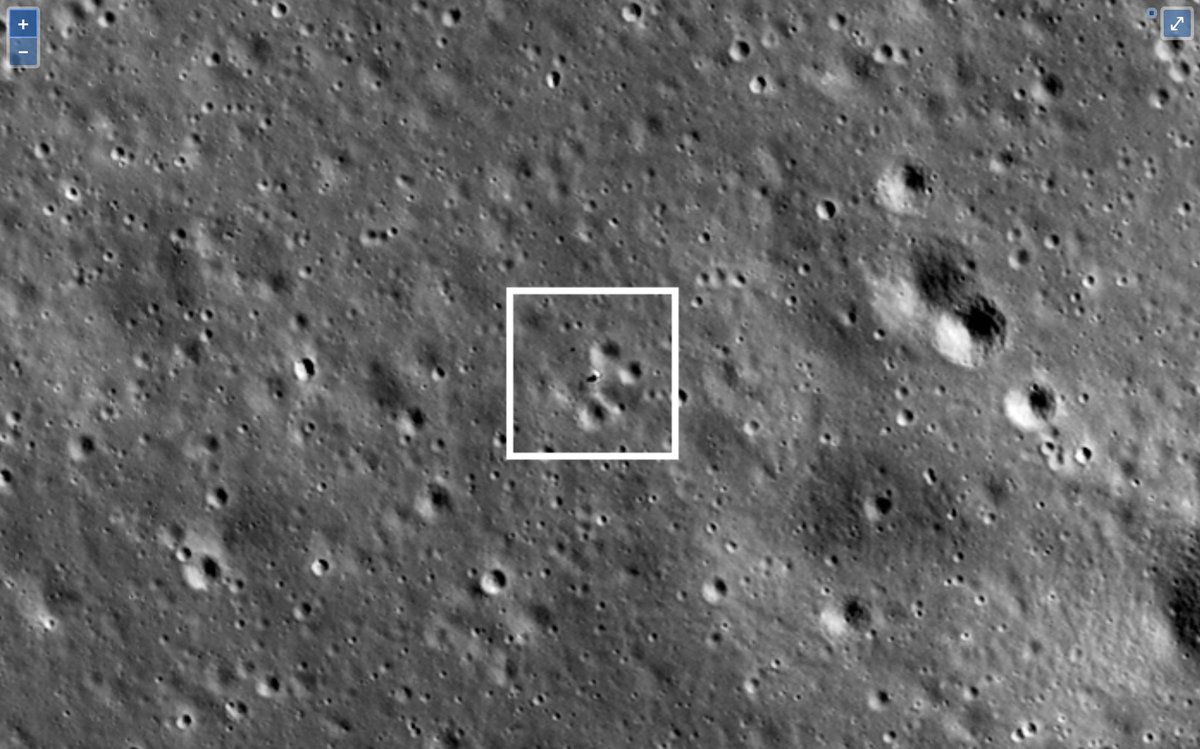
 LRO月球探测器(NASA)
LRO月球探测器(NASA)拍摄的the娥四号模块着陆点照片:
借助特殊的雷达(其外部是两个触角天线和一个在底部下方的扁平天线),其射线会穿透月球表面(LPR-月球穿透雷达),Yutu-2漫游车创建了月球地下部分的三维地图:
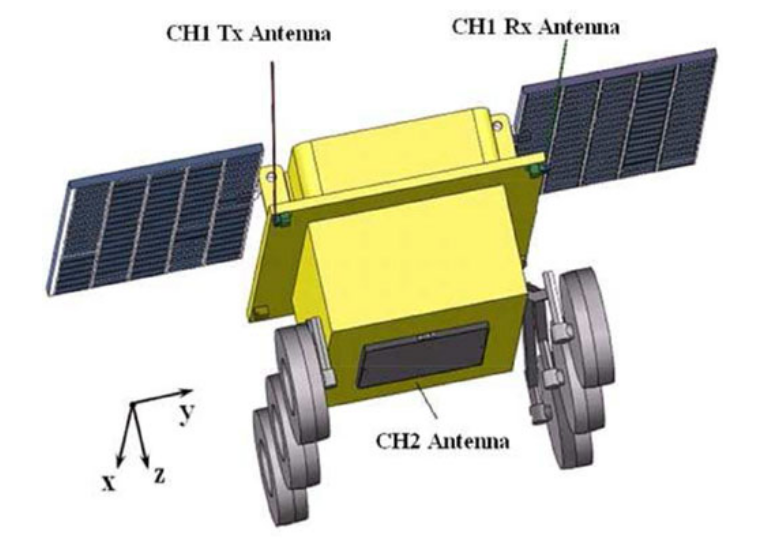
 月球穿透雷达(LPR)功能:
月球穿透雷达(LPR)功能:频道1:
-变送器电压-1000 V(误差<5%)
-发射器脉冲频率-0.5、1、2 kHz
-发射器脉冲到达时间-<= 5 ns
-接收器频率-10-175 MHz
-接收器输入动态范围-> 90 dB
-天线中心频率-60 MHz
-天线带宽-> = 40 MHz
-驻波功能-<= 3
-最大检测深度-> = 100 m
-深度分辨率-1 m
频道2:
-变送器电压-> = 400 V(误差<5%)
-发射器脉冲频率-5,10,20 kHz
-发射器脉冲到达时间-<= 1 ns
-接收器频率-10-1000 MHz
-接收器输入动态范围-> 90 dB
-天线中心频率-500 MHz
-天线带宽-> = 450 MHz
-驻波功能-<= 2.5
-最大检测深度-> = 30 m
-深度分辨率-<= 30厘米
安装在Yutu-2漫游车上的月球穿透雷达(LPR)的装置类似于安装在Chang娥三号任务的第一台Yutu漫游车上的雷达。
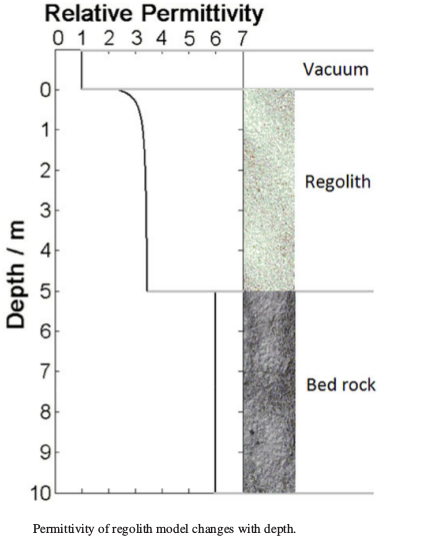
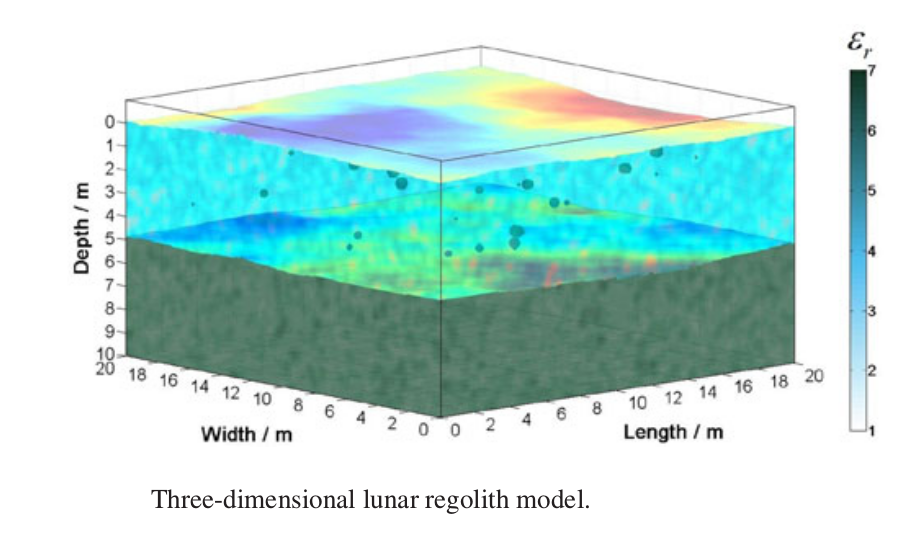
对从LPR雷达接收的数据进行了分析和汇总,在这些图表上,您可以跟踪着陆区域的月球表面的地质组成和特征:
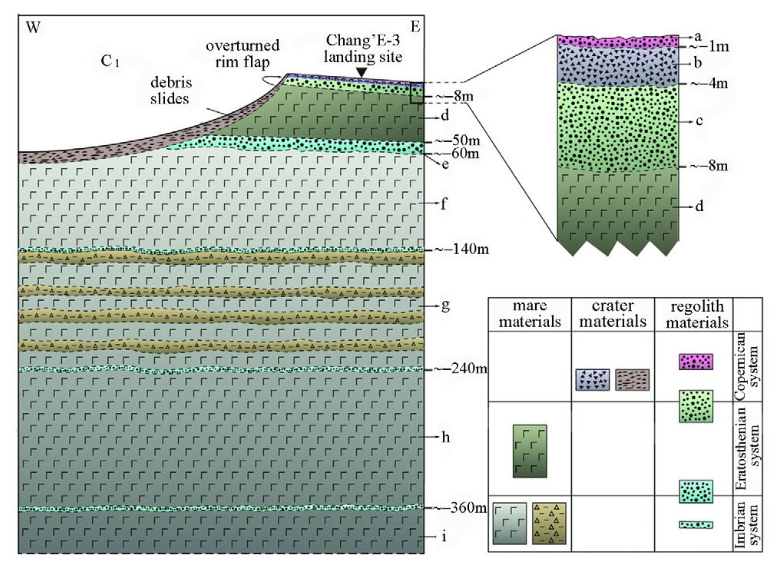
中国航天技术研究院飞行控制中心的科学家和工程师正在努力使阴历第五天(两个地球周)的时间最大化,以便进行研究并从the娥四号着陆舱和Yutu-2漫游车的装置中获取数据。
您可以在此处阅读有关the娥四号着陆模块和Yutu-2漫游者的科学设备的更多信息:
Chang娥四号任务是农历初三。 漫游者“ Yutu-2”寻找...石头e娥四号任务-着陆模块和中继卫星上的科学设备顺便说一句,在2019年4月24日(中国宇宙航行日),中国航天学会举办了一场儿童艺术大赛,旨在征服太空和月球。
孩子们的工作很棒。
郭志成-探索未来的宇宙
韩佳欣-我们进入太空
丹仙奴-超越宇宙的花园
天仙-未来空间站

郑玉峰-一起给空间着色

方永新-能源转换站

李孟银-全球太阳系

徐志云-研究人员

杨浩万-太空基地

杨金如-真空城

卓西元-漂浮的飞船

周仁洋-莫拉(1451)

我特别喜欢这些作品:
薇薇-我的心充满星星

戴嘉义-梦想空间

刘瑞阳-我的太空音乐
