哈Ha 在本文中,我将讨论由旧CD驱动器制成的简单受控爬行机器人。 我只想传达一个想法,而不是传达一个特定的设计,以便每个人都可以根据自己的意愿对可用的细节进行类似的处理。 这篇文章有很多浅色图片和三个gif,总计25 MB。
如果有人喜欢看更多视频,请
观看以下有关该机器人的视频 。
许多电子发烧友都认为,在我们这个时代,可以用过时的CD驱动器来做什么。 最常见的应用是DVD刻录机激光头上的激光雕刻机和该头上两个移动的坐标表。 自动门通常由用于磁盘的滑动台制成(例如,用于猫或仓鼠)。 我从一个可拉出的桌子上制作了两个玩具:“无用的汽车”和爬行的机器人。 我不会谈论无用的汽车,因为它非常简单。 谁在乎,您可以观看
有关她的
视频 。
但是,爬行机器人的想法也非常简单。 如果某人不熟悉CD驱动器的设计,则
可以在Wikipedia上对其进行阅读 。
我将从理论描述开始。 下图显示了侧面爬行的CD驱动器。 他的背面有两个自由旋转的轮子,称为“支撑轮”。 前面有一个带有自己发动机的“方向盘”。 下面有两个可伸缩的支撑物,用于抬高方向盘。
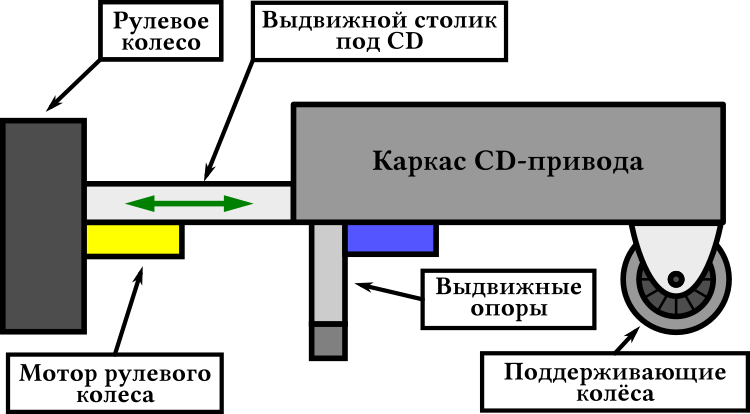
然而,在下图中,前视图却鲜为人知。

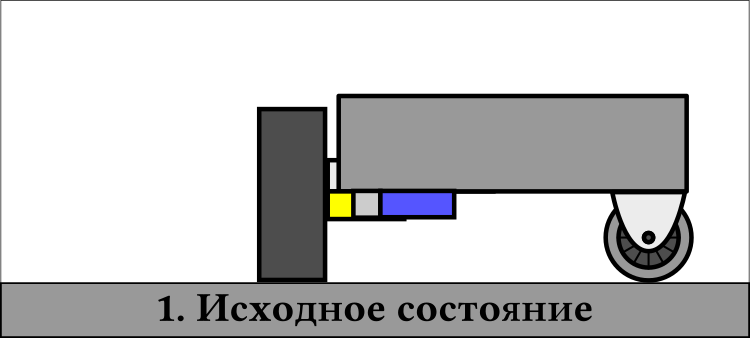
图中还显示了该系统的运行方式。 因此,当推入CD上的滑动台和支座时,处于初始状态。 从该位置开始,机器人开始向前,向后移动并转弯。
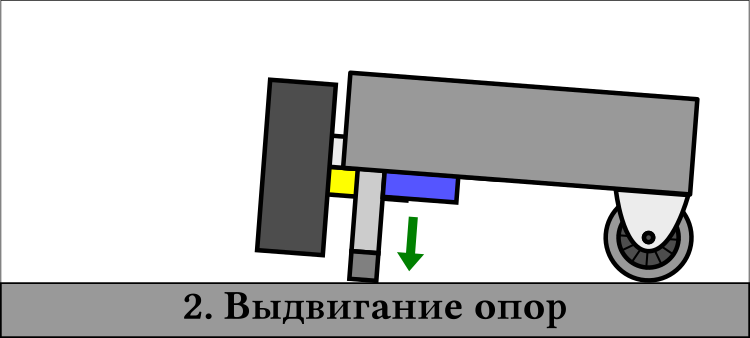
为了向前移动,支撑件首先伸出,从而抬高方向盘。
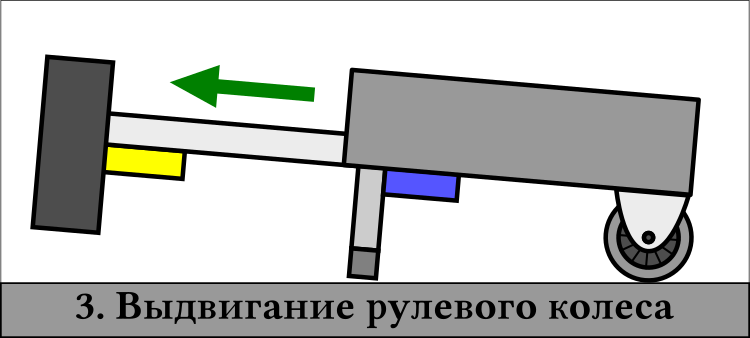
然后,CD工作台与方向盘一起延伸。
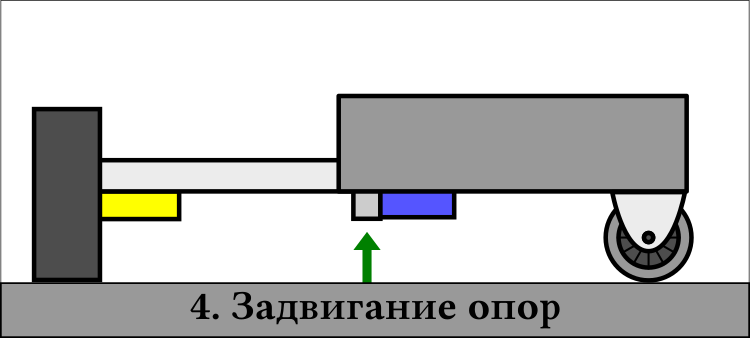
此外,支撑件缩回并且方向盘降低。
现在,它仍然可以通过滑动CD的桌子来恢复其原始状态。
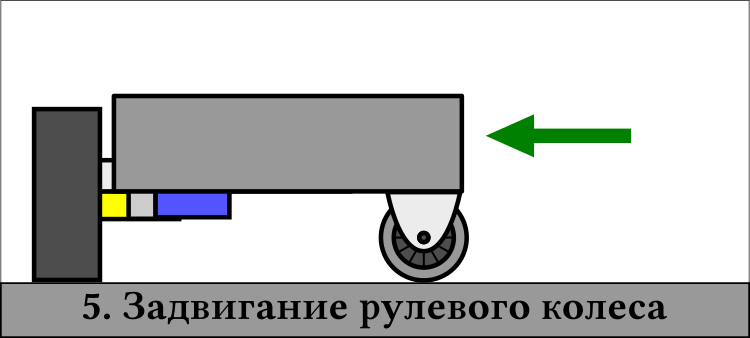
在这种情况下,方向盘会紧贴地面,因此CD驱动器的整个框架都被拉到方向盘上。 接下来,循环重复进行。
为了使机器人处于初始状态,必须打开方向盘电机,同时整个系统开始围绕位于支撑轮之间某处的轴旋转360度。
如果您了解这件事是如何工作的,那么您将很难想象向后运动是如何进行的。
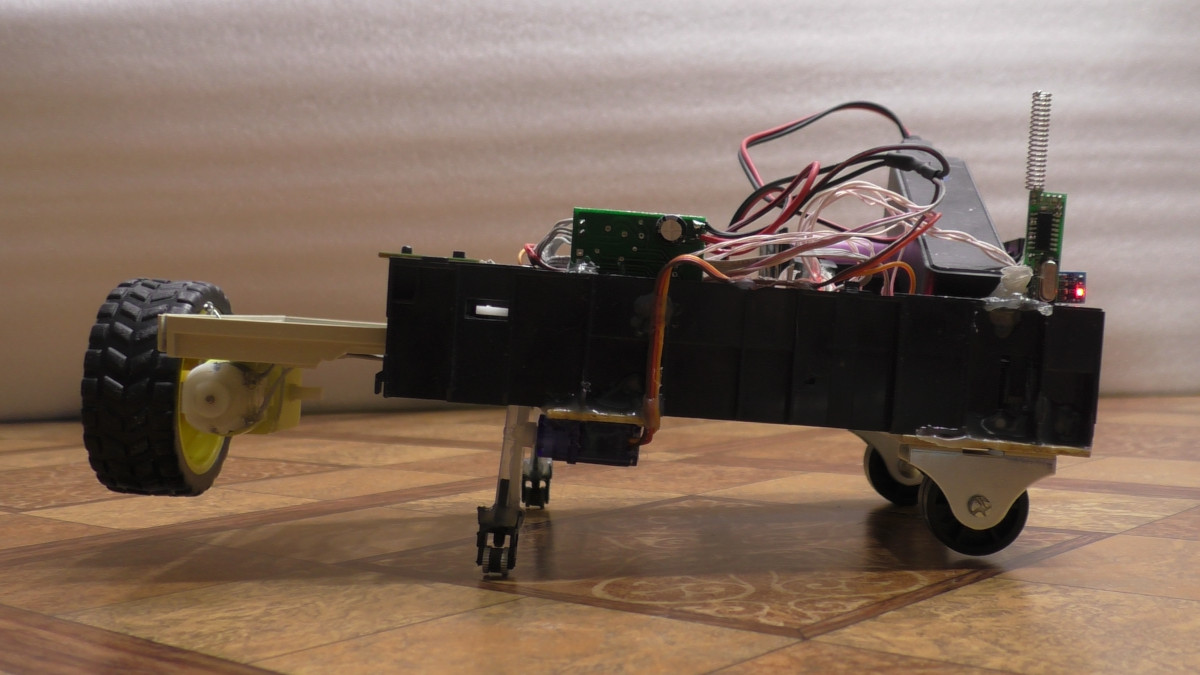
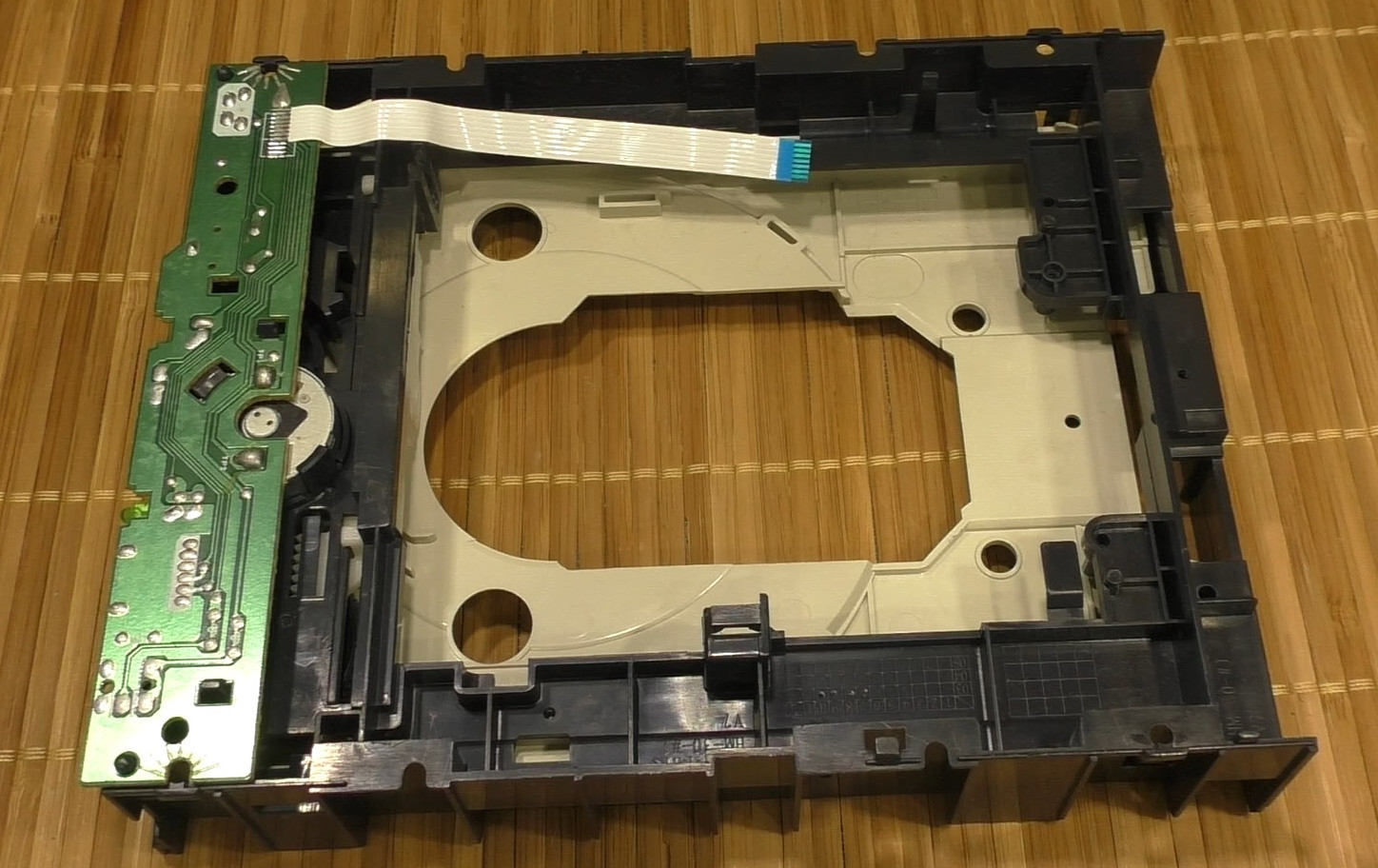
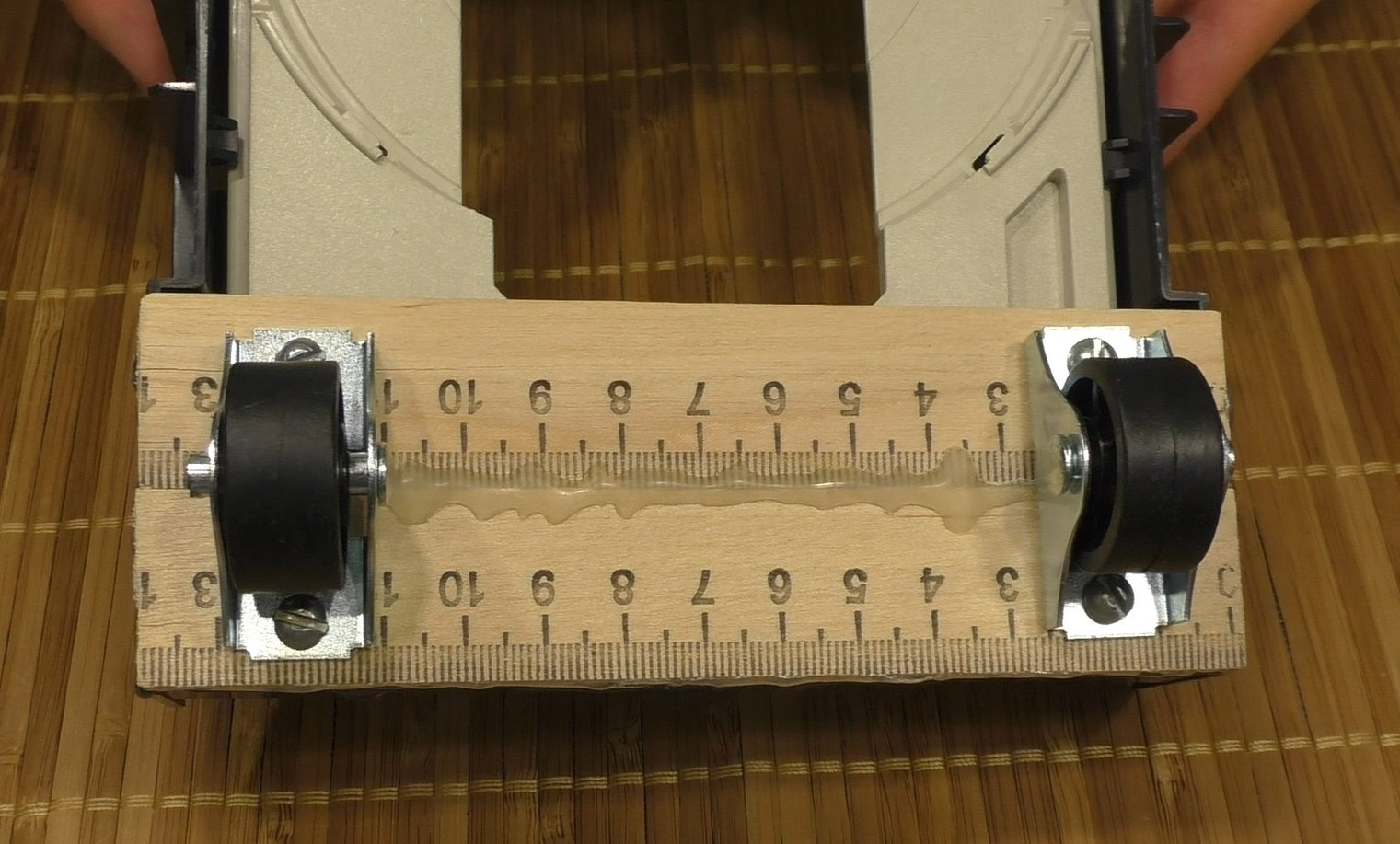
现在介绍一下我的实现。 我不会详细说明,因为所有操作都是随意进行的,只是为了检查该想法的工作能力。 我以一个简单的CD驱动器为基础,从中取出所有光学元件并滑出,只有一个塑料框架,带有一个滑动台,一个马达和用于该台的按钮端开关。
附有家具轮作为支撑轮。
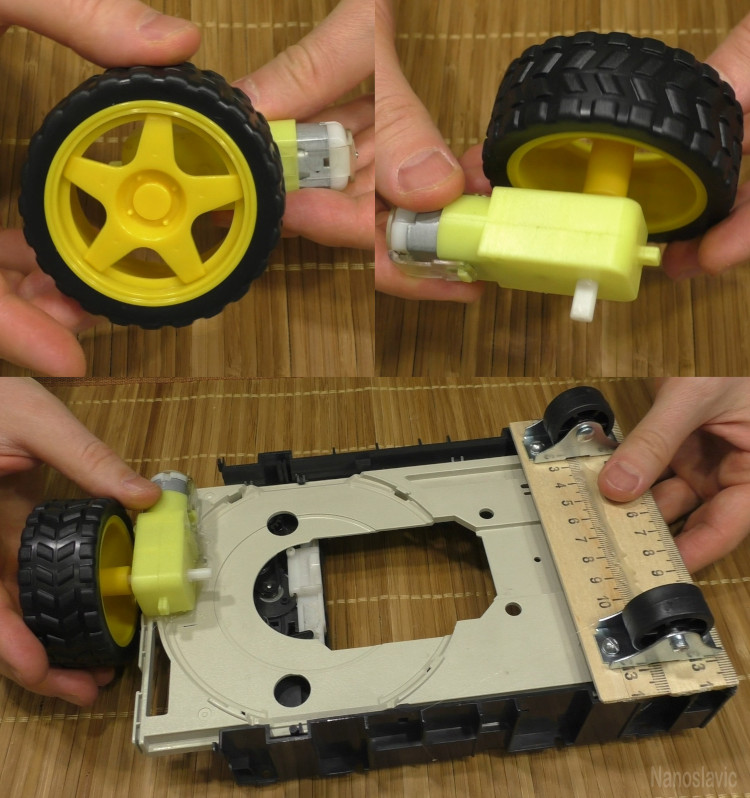
我在互联网上的某个地方单独购买了方向盘。 他有一个马达和一个塑料变速箱。
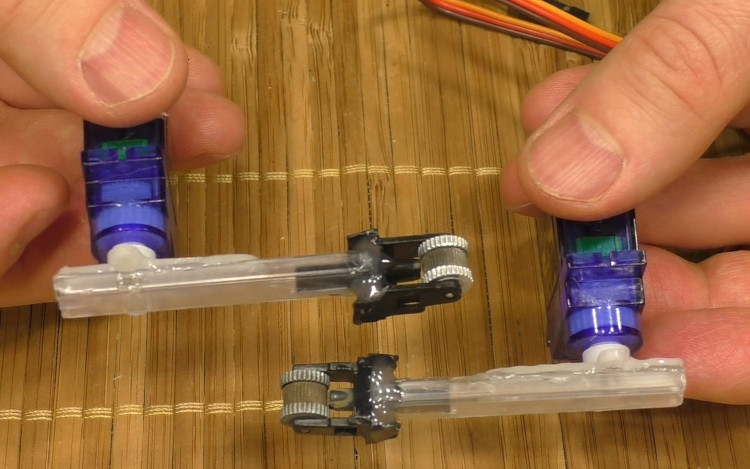
由塑料管制成的可伸缩支撑件,以散装芯片的形式出售在外壳SO8中。 我将打火机上的椅子固定在它们上,之前已经从打火机上取下了火石和弹簧,以便椅子可以自由旋转。 为了扩展支架,使用了两个廉价的伺服器。 一切都主要在热熔胶上组装。
电子产品是由原来的材料制成的,因此并不是最佳选择。 为了控制CD工作台和方向盘的马达,使用了带有晶体管的桥式电路。 这使得可以改变旋转方向。 作为逻辑-某种arduino板。 为了控制运动,他拿了一个便携式钥匙扣和一个接收器响应电路,频率为434 MHz。

为给电动机供电,我串联了三节锂离子电池,没有任何保护,因此我小心地将其打开,有时会检查它们的电量。 为了给数字部分和收音机供电,我使用了发行5 V电压的小型廉价移动电源。
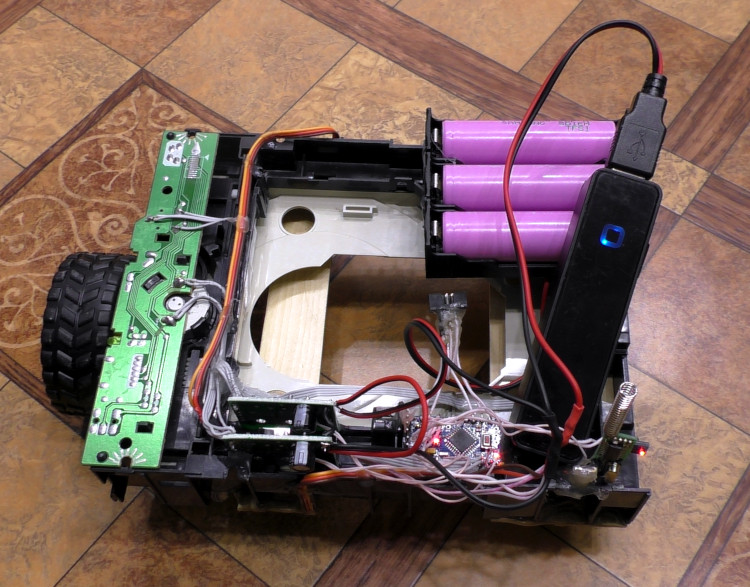
背面的电池非常方便,因为向前推动时方向盘的重量大大超过了重量。
控制程序打开后,将检查CD抽屉的端点并将系统恢复到原始状态。 对于控制,使用4个按钮。 当您按下“前进”按钮时,前进开始。 当您按遥控器上的任何按钮时,将停止并返回到系统的初始状态。 当按下“ Back”按钮时,它向后移动,当按下任何按钮时,它也会停止。 “向左”和“向右”按钮仅在初始状态且仅在被按下时才起作用。
结果,发现只有向前运动才能正常工作。 向后移动时,方向盘伸出时重心会发生很大变化,因此支撑件无法正常提起。 需要更强大的伺服器。 由于系统总是返回到其原始状态,因此只能通过CD的表格长度确定的“步骤”才能移动,但这纯粹是软件限制。
最后是一些gif。
我认为,通过将控制面板做成一个环,并通过按钮和开关控制电动机,可以简化整个系统。 要控制伺服器,您可以在计时器555上制作一个简单的发电机。可以使用普通电池供电,并将其放置在遥控器中,从而减轻了机器人的重量。 这种遥控器可让您完全手动控制机器人。
谢谢大家的关注和出色的工艺。