解析一个奥林匹克问题,我们将沿着迷宫的产生及其通道蜿蜒曲折的道路走下去,并且还将看到在Julia语言中,算法实现的简单性与其伪代码接壤。
挑战赛
迷宫是一个10×10的方格,在某些单元中有障碍物,而在一个单元中有出口。 机器人处于这样的迷宫中,可以执行4个命令:上下左右移动一个单元格。 如果机器人试图越过迷宫的边界或带着障碍进入笼子,则它会保持在原位。 如果机器人进入出口,则它将退出迷宫,并忽略其他命令。 为机器人编写一个程序,无论机器人在开始时位于哪个单元格,无论如何都要执行该程序到达出口。 该计划不应超过1000个团队。

没有条目。 您需要为一个指定的特定条件编写程序
迷宫。
您可以复制的迷宫的版本。 0-空闲单元格,1-障碍物,x-
出路。
0011010011 0100001000 0110x00000 0010000100 0000111000 0000100100 0000010010 0100101010 0011001010 1000011000
一行由长度不超过1000的字符U,D,R,L组成
准备工作
那些没有使用Julia中的图形的人需要下载软件包
using Pkg Pkg.add("Plots") Pkg.add("Colors") Pkg.add("Images") Pkg.build("Images")
在Jupyter中工作最方便,因为图片将在工作期间直接显示。 在这里,您可以找到有关安装的信息,以及针对初学者的介绍和任务。
在我们的任务条件下,有一个迷宫版本可以复制
S0 = "0011010011 0100001000 0110x00000 0010000100 0000111000 0000100100 0000010010 0100101010 0011001010 1000011000"
要绘制迷宫,您需要制作一个矩阵。 由于我们不想手动放置空格,因此我们将使用以下行:
S1 = prod(s-> s*' ', '['*S0*']')
用数字替换笨拙的字母x并解析字符串,我们得到一个定义迷宫的整数矩阵。 然后,为了更大的方便,将“ 1”更改为零,然后将“ 0”更改为1,然后用墙壁将迷宫包围起来:
S2 = replace(S1, 'x'=>'9') M0 = S2 |> Meta.parse |> eval m,n = size(M0) M1 = replace(M0, 1=>0, 0=>1) M = zeros(Int64,m+2,n+2) for i in 2:m+1, j in 2:n+1 M[i,j] = M1[i-1,j-1] end M
在矩阵中
length(M) 144
细胞和从他们
sum(M)-9 70
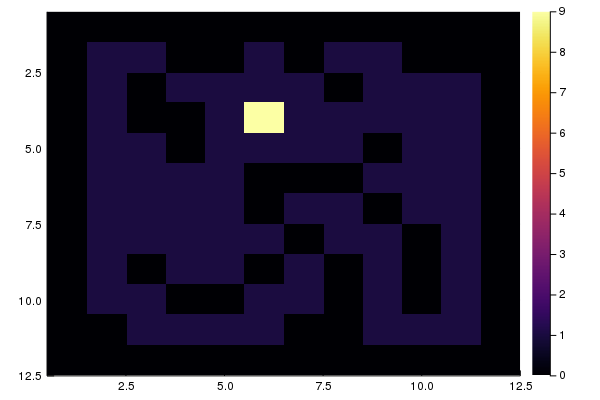
您可以在其上行走的位置-潜在的起始位置。 您可以通过构建二维直方图来显示结果
using Plots heatmap(M, yaxis = :flip)
解决方案验证
首先,您需要制定程序来验证所提出解决方案的正确性。 将复合类型Point设置为使用点和坐标的术语:
mutable struct Point x::Int64
现在,您需要学习如何将机器人可以理解的一系列命令转换为代码。
这个想法很简单:有一个起点坐标,一条线提出了一种算法,告诉人们如何走路。 我们拿一个字母,看看要踩哪个相邻的单元格。 对于当前坐标,我们添加存储在此单元格中的值。 也就是说,如果零(墙)为零,那么我们将不会移动到任何地方,否则我们将朝所需方向迈出一小步。
利用元编程的功能,您可以用庞大,统一的代码替换输入的方向序列,然后执行它
S = "RRLDUURULDDRDDRRRUUU" S1 = replace(S , "R"=>"c.y+=M[cx, c.y+1];") S1 = replace(S1, "L"=>"cy-=M[cx, cy-1];") S1 = replace(S1, "U"=>"c.x+=M[c.x+1, cy];") S1 = replace(S1, "D"=>"cx-=M[cx-1, cy];")
但是此方法有许多不便之处,因此,我们将使用经典的条件运算符。 顺便说一下,输出由数字9表示是一个小技巧:为了不检查每个单元格以及是否是出路,我们通过添加存储在特定单元格中的值来启动移动。 当机器人踩到出口时,故意在其坐标上添加一个较大的数字,以使机器人飞越数组的边界,可以使用该块将其捕获为错误:
try
因此,我们实现了一个函数,该函数将c执行字符串str命令来检查机器人是否从点c开始到达出口:
function isexit(str, c) scatter!([cy],[cx]) try for s in str if s == 'R' c.y+=M[cx, c.y+1]; elseif s == 'L' cy-=M[cx, cy-1]; elseif s == 'U' c.x+=M[c.x+1, cy]; elseif s == 'D' cx-=M[cx-1, cy]; else println("Error! Use only R, L, U, D") end end catch return true end return false end
让我们收集一个将迭代所有起始位置的函数
function test(Str) k = 0 for i in 2:m+1, j in 2:n+1 if M[i,j] == 1 c = Point(i, j) a = isexit(S,c) if a k +=1
检查命令:
S = "RRRLDUUURRRUUURRRRLLLRRUULDDDDRRRRDDDRRRUUU" heatmap(M, yaxis = :flip) test(S)
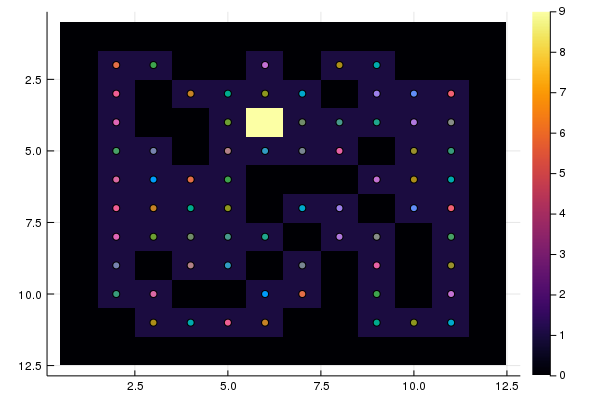
所有出发点均经过测试,只有10个导致退出。 必须建立从每个点到出口的路线。
在探究迷宫的产生和传播之前,我们将保存我们的结果。 我们将使用Images.jl包,该包在图像处理领域提供了许多可能性(一个很好的例子 )。 他的支持工具之一是Colors.jl软件包, 它扩展了Julia的颜色处理能力。
using Images clrs(x) = x==9 ? RGB(1.,0.5,0) : RGB(x,x,x) maze = clrs.(M)

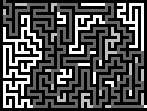
深度搜寻
从关于哈勃(Habr)的文章中实现了这个想法。
这个想法很简单:创建墙壁网格
M = 10 N = 10 A = [ i&j&1 for i in 0:N, j in 0:M ]
然后,通过循环,我们突破了路线和分支。 我们定义了一个函数,该函数查找相邻的未访问区域(例如,将它们用平局指定),并返回这些相邻项之一(如果没有未访问的相邻项,则返回标记点):
function neighbours2(A,p, n, m) nbrs = [Point(px, p.y+2),
我们将像这样打破墙壁:
function breakwall(A, newp,oldp)
演算法
- 使初始电池成为当前电池并将其标记为已访问。
- 虽然有未访问的单元格
1.如果当前单元格未访问“邻居”
1.将当前单元格推入堆栈
2.从附近选择一个随机单元格
3.移除当前单元格和选定单元格之间的墙
4.使选定的单元格为当前单元,并将其标记为已访问。
2.否则,如果堆栈不为空
1.将笼子从堆栈中拉出
2.使其最新
3.否则
1.选择一个随机未访问的单元,使其成为当前单元并将其标记为已访问。
程式码 function amazeng(n, m) M = [ 2(i&j&1) for i in 0:n, j in 0:m ]; p = Point(2,2)
lbrnt = amazeng(36, 48)
回溯路径搜索算法:
- 使初始电池成为当前电池并将其标记为已访问。
- 直到找到解决方案
1.如果当前单元格未访问“邻居”
1.将当前单元格推入堆栈
2.从附近选择一个随机单元格
3.使所选单元格成为当前单元格并将其标记为已访问。
2.否则,如果堆栈不为空
1.将笼子从堆栈中拉出
2.使其最新
3.否则,没有出路。
相反,我们正在一个小区的半径内而不是通过一个小区来寻找邻居:
function neighbours1(A, p, n, m) nbrs = [Point(px, p.y+1),
定义通过绘制路线和失败尝试通过迷宫的算法
function amazeng(img, start, exit) M = Float64.(channelview(img)) n, m = size(M) p = start M[exit.x,exit.y] = 1 lifo = [] push!(lifo, p) while px != exit.x || py != exit.y M[px,py] = 0.4 np = neighbours1(M, p, n, m) if np.x == np.y == 0 M[px,py] = 0.75 p = pop!(lifo)
正如某些人所注意到的,也调用了一个函数,就像算法生成的函数一样(多重调度)。 当您用两个数字调用它时,它将解决构造迷宫的方法,但是如果您通过指定图像和两个点(输入和输出的坐标)作为参数来调用它,则在输出处我们会得到一个传递了迷宫的图像
img0 = load("D:/dat/maze111.png") amazeng(img0)
让我们尝试一下我们的迷宫:
img0 = load("D:/dat/maze12x12.png") n, m = size(img0) amazeng(img0, Point(11,9), Point(4,6) )

即使您修改功能以记住路线,该算法仍然会因为空白而被证明是无效的。 但是迷宫出来的很棒。
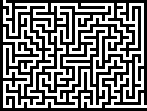
Prim的随机算法
一旦开始绘制迷宫,您就不会停止。 让我们执行另一个有趣的算法 :
- 从充满墙壁的网格开始。
- 选择一个单元格,将其标记为迷宫的一部分。 将单元格墙添加到墙列表。
- 虽然列表中有墙:
- 从列表中选择随机墙。 如果仅访问墙共享的两个单元之一,则:
- 使墙壁成为通道,并将未访问的单元标记为迷宫的一部分。
- 将相邻的单元格墙添加到墙列表。
- 从列表中删除墙。
代号 neighbors(p::Point) = [Point(px, p.y+1),
primaze = prim(19,19); Gray.(primaze)

事实证明,它更具分支性,并且同样出色,尤其是在组装过程中。
现在,我们实现了用于查找最短路径的最通用算法:
方法A *
- 创建了2个顶点列表-待处理且已审阅。 将起点添加到待处理的起点,到目前为止,已审核的列表为空。
- 为每个点计算 -从点到目标的大概距离。
- 从要考虑的点列表中,最小的点 。 让她 。
- 如果 -目标,然后我们找到了路线。
- 我们随身携带 从待处理列表到已审核列表。
- 对于相邻的每个点 (表示该相邻点 ),请执行以下操作:
- 如果 已经在评论中-跳过它。
- 如果 尚未在候补名单上-在此添加。
- 如果要考虑的点列表为空,但我们尚未达到目标,则该路线不存在。
首先,让我们定义“点”类,它将知道它与目标有多远:
mutable struct Point_h x::Int64
现在,我们为结构定义一个比较操作,一种用于确定数组中元素存在的方法,以及删除元素,查找点之间的距离并列出邻居的功能:
藏起来 import Base: in, == ==(a::Point_h, b::Point_h) = ax==bx && ay==by function in(p::Point_h, Arr::Array{Point_h,1}) for a in Arr if a == p return true end end return false end function splicemin!(Arr)
与往常一样,可以使用以下命令来澄清晦涩的运算符: 例如?splice ?argmin 。
而且,实际上,方法A *本身
代号 function astar(M, start, final)
我们将迷宫图像加载到图片中并以矩阵形式呈现:
img0 = load("D:/dat/maze0.png") mazematrix = Float64.(channelview(img0))
我们建立了一条从任意点退出的路线:
s = Point_h(11,9)

来自所有位置的搜索如下所示:

看到代理 冲 总是趋向出口,经常变成死胡同,这会导致不必要的步骤,并且会记住整个路线。 通过A *算法稍微复杂一点的版本可以避免这种情况。
- 创建了2个顶点列表-待处理且已审阅。 将起点添加到待处理的起点,到目前为止,已审核的列表为空。
- 为每个点计算 。 -从起点到终点的距离, -从点到目标的大概距离。 每个点还存储指向其起点的链接。
- 从要考虑的点列表中,最小的点 。 让她 。
- 如果 -目标,然后我们找到了路线。
- 我们随身携带 从待处理列表到已审核列表。
- 对于相邻的每个点 (表示该相邻点 ),请执行以下操作:
- 如果 已经在评论中-跳过它。
- 如果 尚未在等待列表中-在此处添加它,记住指向的链接 并且已经计算 (这是 +距 之前 )和 。
- 如果 在列表中以供考虑-检查是否 +距 之前 所以我们到了重点 较短的方法,更换 在 +距 之前 以及他们的出发点 在 。
- 如果要考虑的点列表为空,但我们尚未达到目标,则该路线不存在。
但是,即使有不必要的步骤,我们的选择也完全在任务的限制之内,因此修改程序将是您的功课。
直到奥运会结束,我们什么都没剩下,但是我们仍然需要学习如何将算法的结果转换为"RRLUUDL..."形式的命令。
在经历了所有这些迷宫之后,我们可以假定解决方案要简单得多。 实际上,一个简单的选择马上就产生了,但是我真的很想制造精美的东西 。
如果我们将我们的艺术家放在一个空旷的地方并开始随机散步,他会在出发位置附近犹豫。 但是随着墙的引入,部分方向将开始消失,自由度将变小,并且在输入数据相同的情况下,主体将移动更大的距离。
这是我们的团队检查版本,以适合从迷宫中解救机器人:
代号 M = [ 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0 1 0 1 1 0 0 0 0 1 0 1 1 1 1 0 1 1 1 0 0 1 0 0 1 9 1 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 0 0 1 1 1 1 0 0 0 1 1 1 0 0 1 1 1 1 0 1 1 0 1 1 0 0 1 1 1 1 1 0 1 1 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 1 0 0 1 1 0 1 0 1 0 0 0 1 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0] mutable struct Point
现在,生成随机行就足够了,直到您获得了一个适用于所有起始位置的行:
using Random S = randstring("RLUD",200) "RDRRRDLRLUULURUDUUDLLLLLULLUDRRURDLDLULLRLUUUDURUUUULRUDUURUUDLRLLULRLUDRRLRRULLDULRRRRULRLLDULRLDRUDURDRUUDUUDDDDDLURRRRDRDURRRDDLLDUURRRLDRUDLRLLRDDRLRRRDDLLLRUURDRLURDLLUULLLLUURLLULUDULDDLDLLRLDUD" test(S) 41 test completed from 70
另外,有可能不用担心测试。 读取任务并生成具有最大允许条件的随机字符串就足够了:
for i in 1:20 S = randstring("RLUD",1000) test(S) end 70 test completed from 70 70 test completed from 70 70 test completed from 70 70 test completed from 70 55 test completed from 70
也就是说,生产线将通过测试的可能性为70%。
仅此而已。 我希望读者能够成功的随机,耐心和直觉,寻求明显的解决方案。
对于好奇者-可以加深主题的链接: