
距离在国际空间站上启动FEDOR机器人还有两个多月的时间,其转变为网络宇航员的过程几乎已经完成。
继续本出版物 。
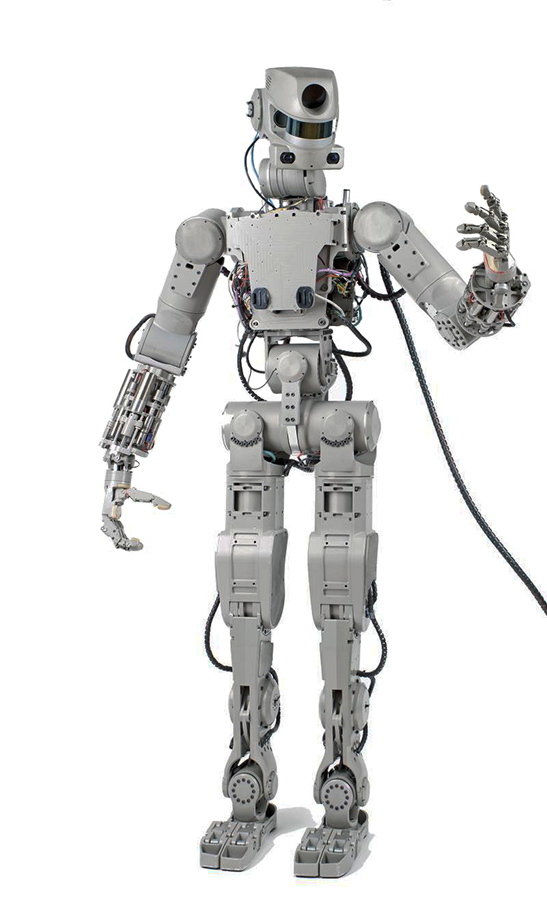
Fedor机器人或FEDOR(最终实验演示对象研究)是由Android技术NGO和高级研究基金会(FPI)开发的拟人化机器人,应代替高风险人员。
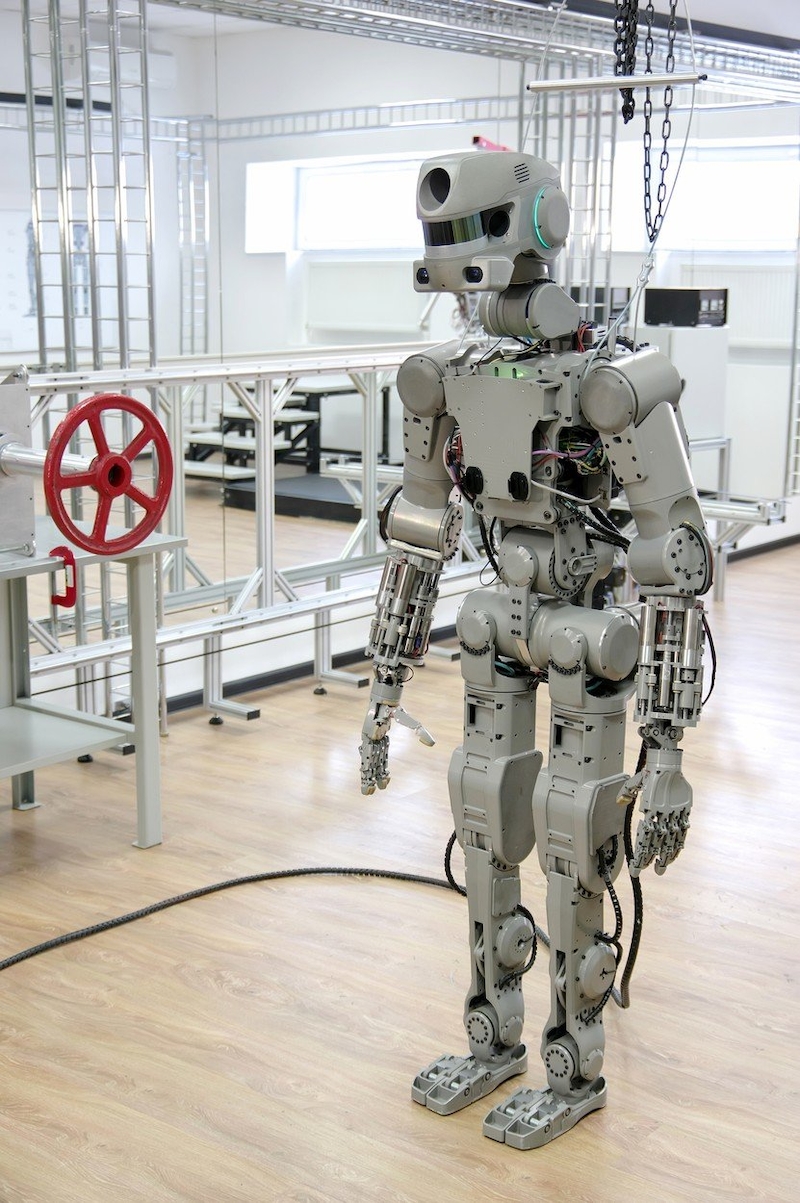 FEDOR机器人的功能:
FEDOR机器人的功能:- 高约190厘米;
- 重量可达160公斤(取决于所使用的模块);
- 功率高达13.5 kW(20马力),电池-外部式挎包或电缆电源;
- 包括1.5万个零件;
- 软件:圣彼得堡基于Linux开发的实时操作系统,C ++,C#和Python的控制软件;
- 离线工作长达1小时;
- 配备了两个摄像头,热成像仪,麦克风,GPS,GLONASS,15个测距仪式激光器以及用于确定身体位置的特殊系统;
- 机器人立体视觉系统的视频通道可以共同工作,也可以单独工作(这些通道的共同工作使您可以确定到物体的距离,并且可以分开-同时解决至少两个功能任务,例如,同时使用两个不同的工具执行工作动作);
- 操作模式:独立,复制(完全重复操作员的操作);
- 机器人技工几乎可以重现人体的任何运动,并且软件(包括补充的软件库)使您可以扩展机器人的专业技能。
事实证明,俄罗斯航天局计划于2019年8月22日使用Soyuz MS无人飞行器同时向国际空间站发送两个FEDOR机器人。
这个太空测试项目被称为“网络船员”。 但是,该项目的全面实施仍存在疑问。
问题在于,在这种情况下,FEDOR机器人不是根据设计计算通过的,而是作为可以紧凑地放置在货舱中,无需包装并在国际空间站上使用的科学设备,而是需要像船上的普通宇航员一样放置的完整人形结构。 “联盟MS-14。”
首先,由于国际空间站上的宇航员没有经过组装这种复杂设备的培训,并且根据地球的指示,他们将能够进行组装,但是会花费宝贵的太空时间。
其次,无论如何,“网络乘务员”的首次试飞应该揭示出许多问题和问题,这些问题将在国际空间站上以目前的运行模式解决,并加以考虑和分析以调整进一步任务的科学计划。
因此,立即有必要最终确定用于空间标准的机器人结构元素。
在将第一版FEDOR机器人移交给Roscosmos和SP Korolev火箭与航天公司Energia(RSC Energia)来研究其在载人程序中使用的可能性之后,Roscosmos的太空工程师承担了新的任务-准备FEDOR机器人可以在很短的时间内完成太空任务。
转移到Roscosmos的综合设施包括以下元素:移动机器人,控制面板,集成工具和地面部分。
宇航员的空间要求:
 与民用机器人不同,FEDOR机器人的太空版经过了改进:
与民用机器人不同,FEDOR机器人的太空版经过了改进:- 将机器人重量减少到105公斤;
- 肩带减少了几厘米(以增加沿着舱口直径的间隙,该间隙为六到七厘米,在测试中发现将其移除很不方便);
- 更换常规电池以满足太空飞行安全要求;
- 安装了新驱动器;
- 机器人的设计在振动支架上进行了测试。
目前,FEDOR-宇航员版改装机器人的所有系统均已投入运行并准备就绪。
但是,随着FEDOR机器人常规座椅的完成,RSC Energia的工程师不得不动手。

目前,此问题已得到解决,FEDOR宇航员将乘坐联盟号MS-14太空飞船飞向国际空间站,而不是在宇航员的常规住所中飞行(事实证明,即使在最适应的状态下,这对机器人来说也不够用),而是采用特制的“椅子框架”由铝合金制成,可以保护机器人的组件和机械装置在飞行过程中不受外界影响。
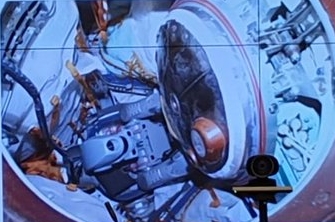
机器人的“椅子框架”的第一个版本如下所示:
与国际空间站对接后,在零重力下,宇航员将不得不将机器人从飞船转移到国际空间站,而无需进行任何改动,因此继续工作,因此,在Roscosmos和RSC Energia中,他们试图尽可能地简化这项任务,并最大程度地减少机器人在卸货阶段的运输时间,以及将来在太空条件下进行测试时。
总的来说,拟人化的机器人Fedor尚未登上ISS,但是已经为地球上的工程师和轨道综合体上的宇航员设定了许多任务。
计划于2019年8月22日与Soyuz MS-14无人飞行器一起发射Soyuz-2.1a运载火箭。 航天器将在国际空间站停留大约一周半,然后自动返回地球。
顺便说一下,计划在这次试飞的框架内测试数字导弹控制系统与紧急救援系统的模拟“填充”之间的相互作用。 如果出现问题,则机器人仍应保持功能正常。
ISS现在正在轮换机组人员。
俄罗斯宇航员奥列格·科农年科(Oleg Kononenko),加拿大大卫·圣·雅克(David Saint-Jacques)和美国人安妮·麦克莱恩(Anne McClain)将从国际空间站返回地球。 他们于2018年12月到达车站。
国际空间站和联盟号之间的过渡舱口将于6月24日莫斯科时间23:10关闭。 计划于2019年6月25日在该站下船,该飞机的降落引擎为4.54。
计划于2019年7月20日将机组人员乘坐联盟号MS-13航天器送往国际空间站,该航天器包括:亚历山大·斯科沃佐夫,安德鲁·摩根和卢卡·帕米塔诺。
因此,Alexei Ovchinin(俄罗斯),Tyler Nicholas Haig和Kristina Koch(均来自美国)以及7月发射的三名新宇航员将在国际空间站与FEDOR机器人见面。
FEDOR宇航员通过三种方式进行控制:通过无线电,光纤或普通电缆。
不仅国际空间站上的宇航员将能够控制机器人,而且地球上的技术专家还可以通过外部通信通道连接到机器人,并使用带有3D眼镜的特殊“控制”服通过机器人的眼睛查看情况。
有趣的是,计划进行哪些科学任务和实验,并将通过FEDOR机器人在国际空间站上完成。
尽管早在2016年,据说FEDOR机器人将能够进入外太空,执行维护和其他计划的工作。
在完成对国际空间站上机器人的电磁兼容性的其他测试后,将测试通信通道,联邦快递宇航员将执行来自地球的一系列命令。
