
Astrobee项目的自主飞行无线小型机器人立方体“ Bumble”开始在国际空间站上进行飞行测试。
2019年是ISS上的机器人年。 FEDOR尚未到来,但战斗测试已经开始使用Astrobee项目的机器人进行。

站内已经有两个机器人-Bumble和Honey,第三个机器人Queen将在7月到达国际空间站。

它们的名称不太容易与缩影关联,并且具有“蜜蜂”的倾向。
这些是服务小型自主机器人,专门设计用于在ISS模块内以零重力工作,这是由
NASA在艾姆斯研究中心设计和制造的,这就像蜜蜂一样承担日常空间任务的一部分,并使ISS工作人员摆脱简单但频繁的行动。
因此,Astrobee项目是一个由复杂的机器人组成的自由飞行系统,其主要目的是在零重力条件下测试小型自动化平台,并在实际条件下接收和分析数据,并可能进一步升级和改进机器人的软件和功能,以执行当前和新任务在国际空间站上。

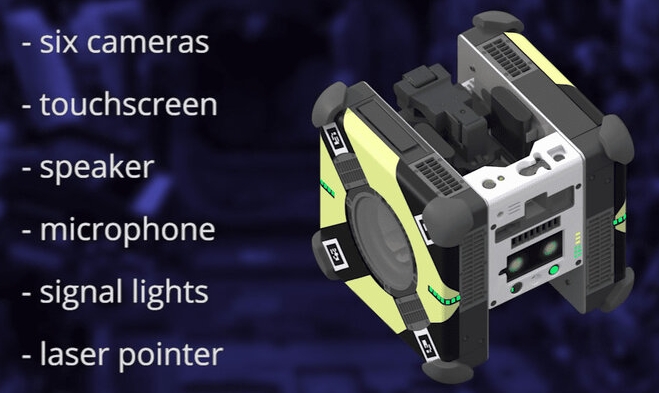
 Astrobee项目机器人的特点:
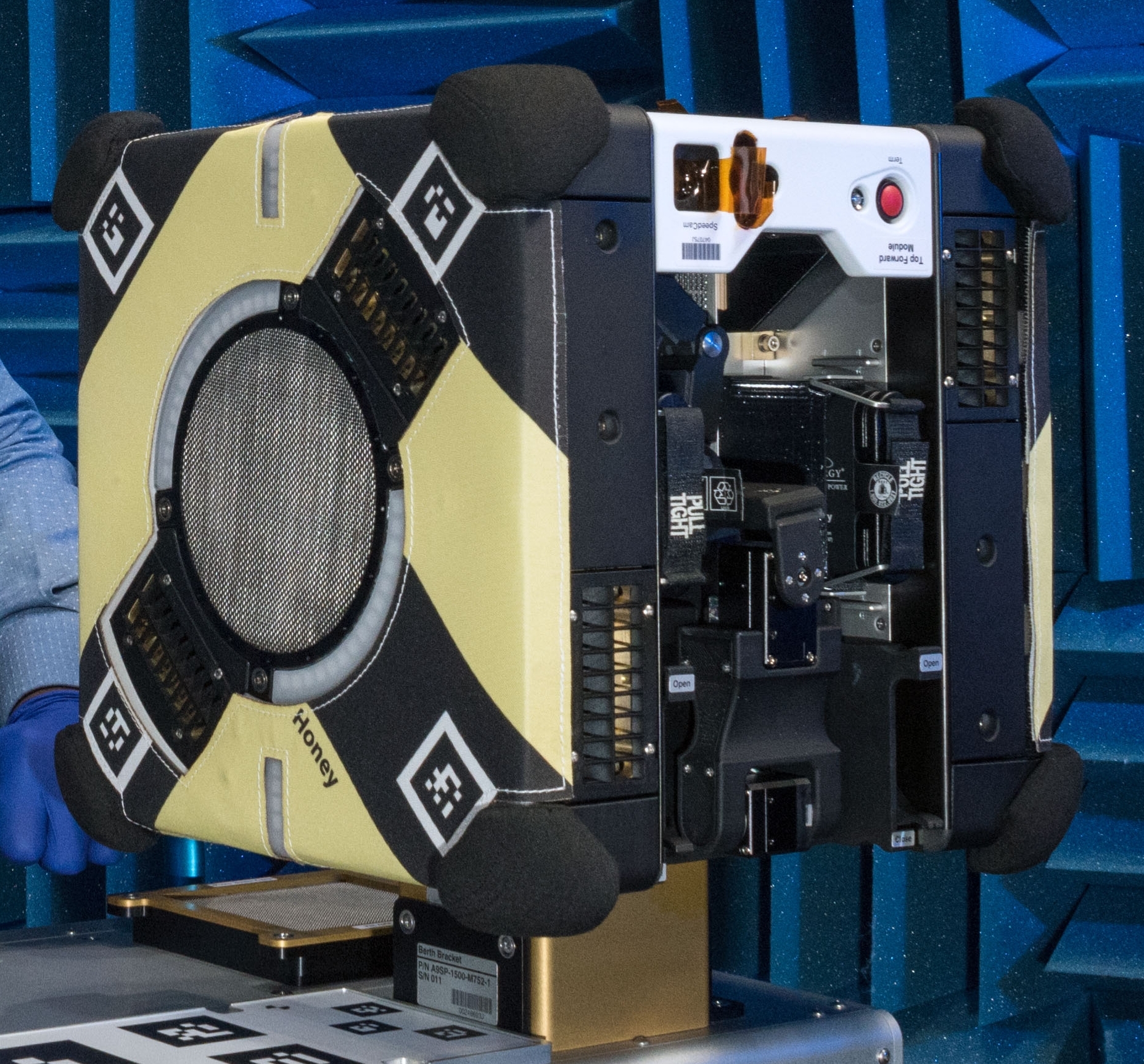
Astrobee项目机器人的特点:-一个机器人的尺寸为30x30x30厘米(1x1x1英尺);
-机器人的主体覆盖有柔软的材料,以最大程度地减小机器人撞击国际空间站上的物体或元件时可能造成的损坏;
-机器人的部分脸部设计用于在较小的负载下工作,甚至还有一个系统,该系统使用折叠机械手捕获和固定物体,以便机器人可以将物体从工作站的一端固定到另一端并安全地移动到另一端,借助这种捕获,机器人可以在以下情况下固定其位置:必要时,抓住国际空间站的扶手或其他部件;

-机器人有一个单独的外部充电站,用于为机器人的电池充电并获取遥测数据;

-机器人只有在工作模块中存在大气的情况下,才可以在零重力条件下在国际空间站内移动;它们的反应系统使用站内的空气进行移动;
-每个机器人都有其自己的机载风扇系统计算机控制系统,该系统可让您通过12个喷嘴以与预期运动矢量相反的方向捕获和排放空气,这使机器人可以在任何方向上移动并以零重力围绕ISS自由飞行;
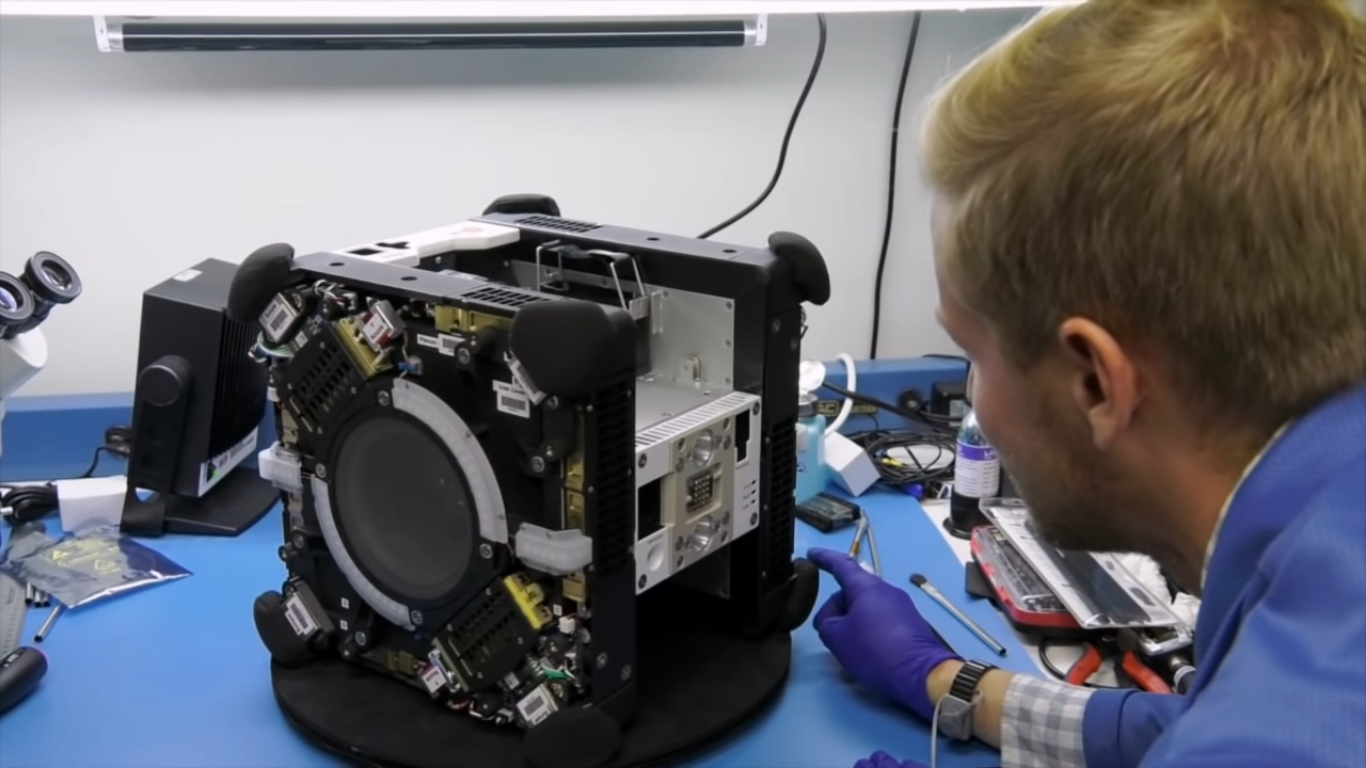
-机器人风扇位于其立方体表面的特殊保护壁后面;
-机器人的计算机系统在Linux上运行,负责处理对象和移动对象的模块在Android的基础上工作,这使您可以在必要时快速扩展系统的功能;
-使用Astrobee项目软件
链接到github存储库 。
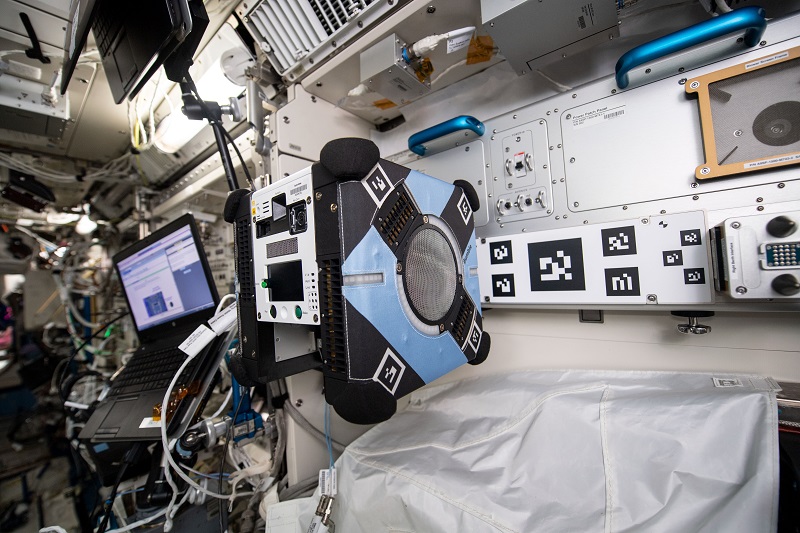
-每个机器人都配备了:一个主导航摄像头,其视野为116°,多个具有自动对焦功能的高清摄像头,能够将信息从ISS实时传输到地球,其机载CamBoard Pico Flexx摄像头使该机器人能够识别物体并四米远的障碍物;
-
每个机器人都有一个光学探测器来确定速度和紧急停止程序;
-机器人的操作模式:自主,也可以对其进行远程控制,安全地进行拾取,必要时进行充电,然后将其关闭。
 Astrobee项目机器人的功能:
Astrobee项目机器人的功能:-机器人的主要任务是帮助国际空间站上的机组人员执行许多例行任务,以便员工可以专注于更重要的任务(进行实验和各种研究);
-进行盘点,记录实验,检查国际空间站系统,并通过站内狭窄的走廊和模块之间移动负载,物体和工具;

-在没有人员或机组人员无法快速到达的地方进行ISS模块的维护;
-监视国际空间站系统和传感器的运行;
-监测空气质量,根据需要经常分析国际空间站不同位置的二氧化碳浓度水平。
 ISS上的Astrobee项目机器人外观的历史:
ISS上的Astrobee项目机器人外观的历史:-充电站于2018年11月17日在国际空间站上交付,并于2019年2月15日安装;


使用ABB断路器:

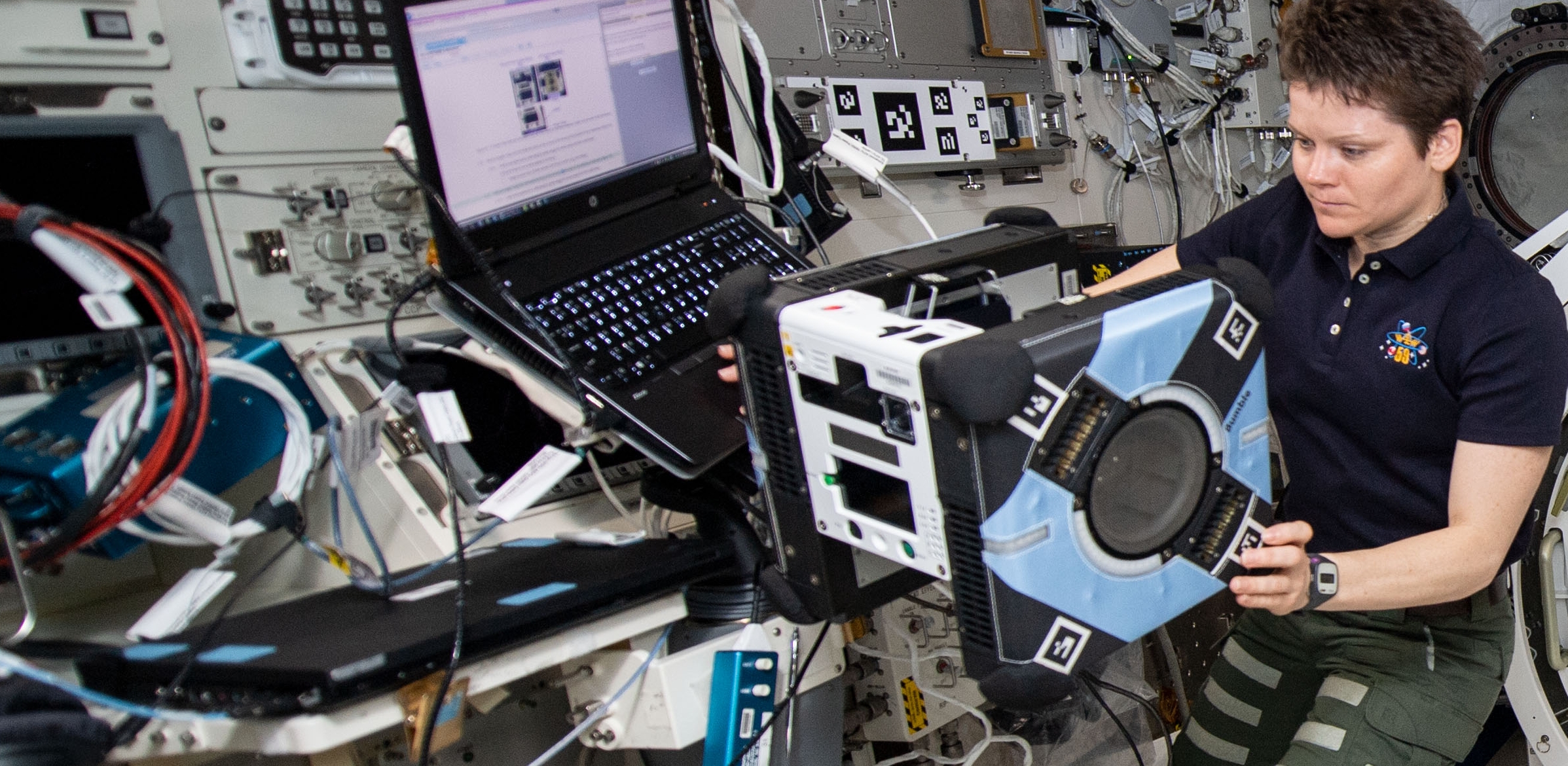
-Bumble和Honey机器人于2019年4月17日从地球发射到ISS;

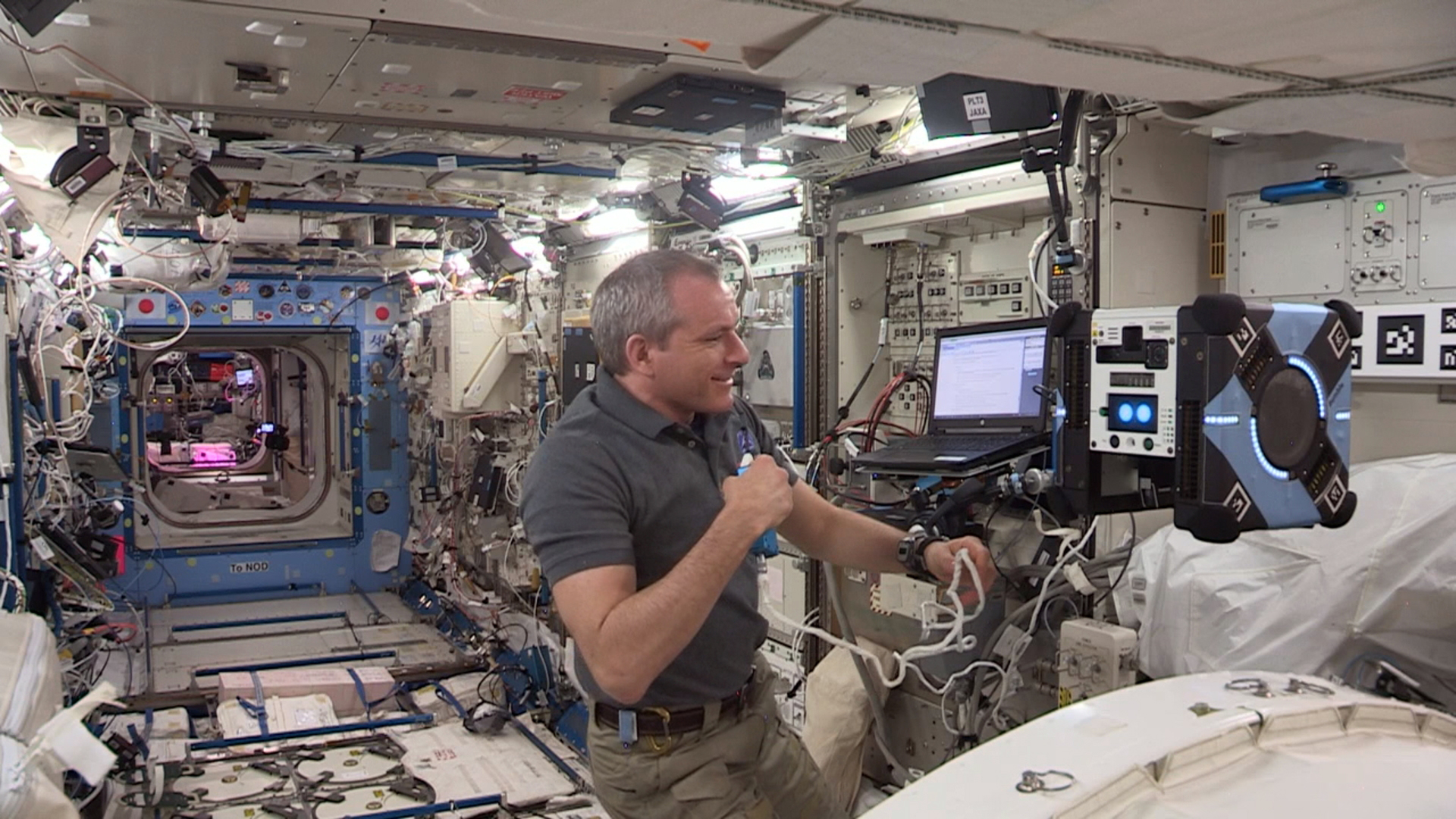
-2019年4月30日,国际太空站的宇航员安·麦克莱恩(Ann McClain)打开了Bumble机器人的包装盒,并在位于艾姆斯研究中心的NASA的Astrobee开发团队的支持下,对机器人的所有辅助系统进行了测试,包括航空电子设备,摄像机,推进系统和数据传输并为其电池充电;





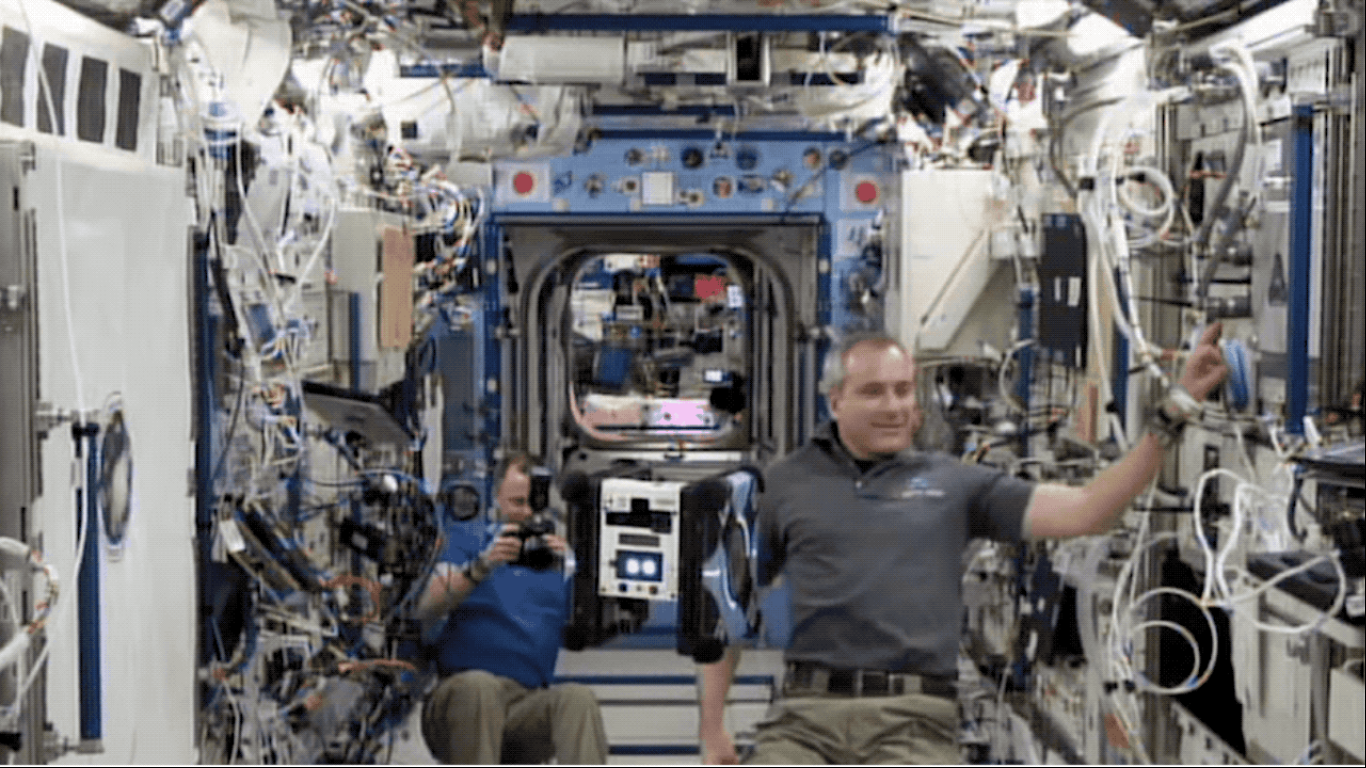
-2019年6月14日,开始使用Bumble机器人进行飞行测试;
-2019年7月-第三台Queen机器人有望抵达国际空间站。
关于ISS上的Astrobee
Bumble机器人的
首次飞行 :
2019年6月14日,Bumble机器人成为Astrobee项目的第一台机器人,该机器人在零重力下进行了首次测试飞行。
在Bumble机器人首飞之前,位于Ames研究中心的Astrobee项目团队远程检查了其所有机载系统,并收到了来自地球的确认,确认该机器人可以识别其位置并准备在ISS中导航。
加拿大航天局的宇航员大卫·圣·雅克(David Saint-Jacques)通过在Kibo模块中的ISS科学实验室内手动移动Bumble机器人,为飞行前测试提供了手动帮助,使该机器人的导航系统在事发后可以在新环境中进行校准。
Bumble机器人的导航系统使用全职摄像机监视和监视外部空间,然后将接收到的图像与先前加载到该机器人中的ISS内部地图进行比较。

Astrobe项目的机器人被设计为可以在ISS上的任何方向移动并绕其轴在太空中旋转。
接下来,开始测试Bumble机器人的飞行系统在自动模式和受控模式下(远程)的运行情况。
在Bumble机器人的首次试飞期间,检查了其主要机载部件的操作,并执行了一系列基本动作,例如“向前飞行11.8英寸(30厘米)”或“向右旋转45度”,即空间定向ISS等。

NASA计划继续通过一系列日益复杂的操作来测试Bumble机器人的飞行能力,以确定其元素在零重力下的工作情况,以及对该软件进行哪些调整才能进一步使用。
根据这些飞行测试的复杂结果,将为Astrobe项目项目的机器人推进系统创建基本设置,并计划借助该设置帮助Bumble,Honey和Queen机器人准备担任新的ISS机组人员的角色。

