电子产品开发中的借贷过程的故事就是一个很好的例子。

记录自制嗅探器的电梯日志
一旦我需要复制一个相当简单的设备。 该制造公司不复存在,但在全国各地仍然有更换损坏或用过的设备的需求。
设备本身是左侧照片中的电梯呼叫按钮。 为了进行实验,他们给了我两份,其中一份可以完全拆开。
总体工作计划如下所示:
- 研究电路板;
- 研究电路板本身的元素基础;
- 画出她的电路图;
- 尝试从微控制器读取固件文件;
- 拆卸固件;
- 提取运算算法;
- 开发新的董事会;
- 编写新固件。
如果第4款失败,则进一步的计划将会更加复杂,但我很幸运。
我们研究实验
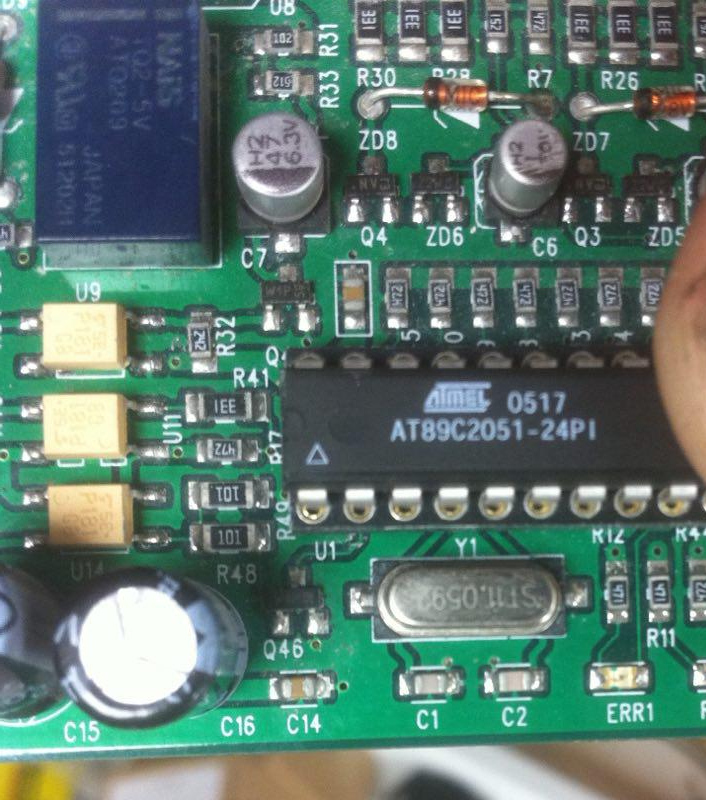
主微控制器
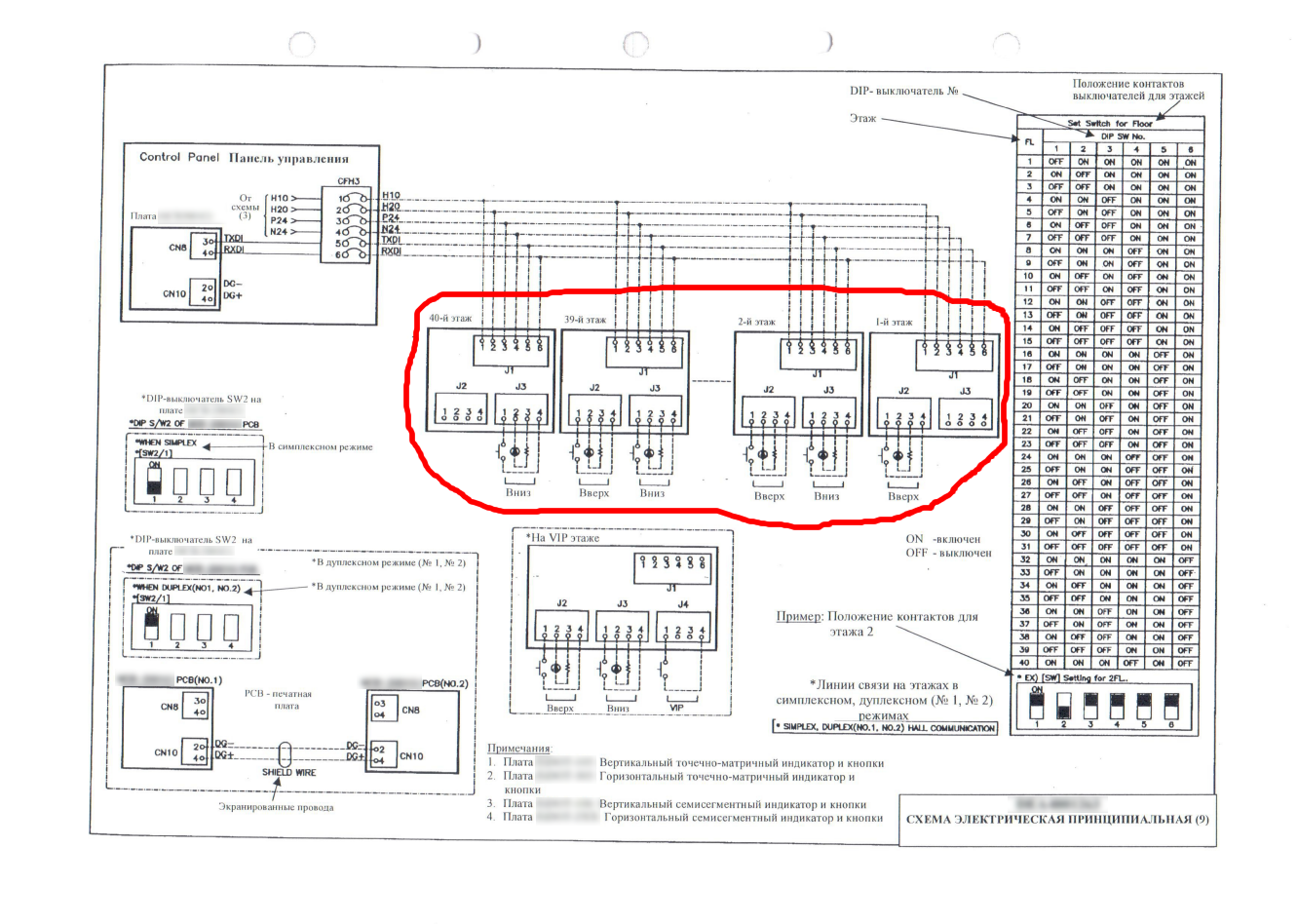
电梯的一块电路,其上的电路板用红色圈出
该板组装在基于Intel MCS-51架构的1997年微控制器AT89C2051上。 在2020年,她庆祝了自己在嵌入式系统市场40周年。
一个小小的解释:微控制器就是这样的微电路,它包含一个计算核心和一组用于控制外部设备的外围设备。 例如,在现代洗衣机中,微控制器会轮询控制按钮,传感器,在屏幕上显示信息并控制泵,加热器,阀门和滚筒驱动器。 对于大多数这些功能,它不需要中间设备,而只需要一组无源电子组件。
我们拆卸电路板
将来草绘电路板的原始电路图将有助于找出微控制器引脚的用途,这是解析固件代码所必需的。
原始设备是由一家中国公司开发的,因此其电路非常混乱,并且包含许多不必要的组件。 例如,继电器通过双极晶体管,光耦合器和现场设备的三级串联(按该顺序)接通。
一位与中国制造商合作的熟人告诉我,如果只有一个人,中国人会参与类似的复杂计划,以增加开发和生产成本。 在此之后,我倾向于相信他:

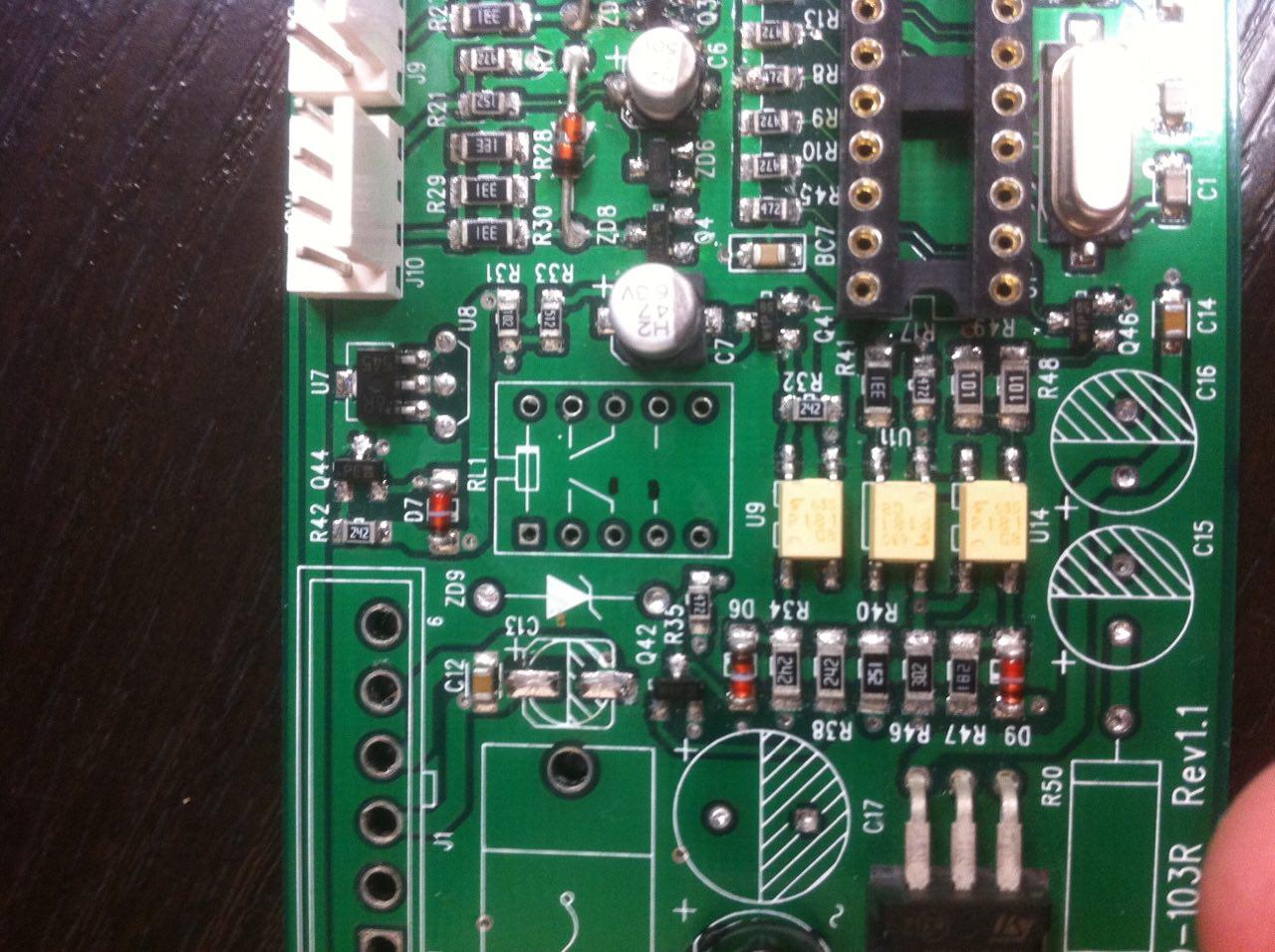
双方在中文两层板上的同一位置。 三个大电阻未连接任何东西。 我什至用强力手电筒照亮了主板,以确保。
方案被复制,神秘的地方在multisim中建模,我们占用了固件。
尝试读取固件
我很幸运,没有在控制器的两个板上都启用读保护,所以我成功地将两个固件选项合并为类似的色情内容:
美国发烧友个人博客的照片
拆卸固件
下一步,我们需要将此机器代码转换为更具可读性的内容:

我们使用著名的IDA Pro工具,该工具已经具有包含所有外设寄存器的控制器,然后打开HEX固件文件:

处理董事会以汇编语言接收的数据
之后,有一个相当繁琐的过程来研究我们的计算内核的指令集,对汇编代码进行注释和解码。
中断处理程序本身位于中断向量表的地址中;外设寄存器中的条目提供了有关通信接口配置的信息。 一步一步,未命名的汇编代码已变成可以读取的内容。
提取工作算法
由于我需要在不同的元件基础上开发新设备,因此有必要从代码中提取算法。 一段时间后,这样的伪代码诞生了:
void UartISR (void) { counter500ms = 0;
对接收到的数据进行相同的处理
谁在乎传输协议:
电梯控制站通过全双工24伏接口与呼叫按钮板通信。 在正常模式下,按钮卡监听线路,等待9位数据包。 如果该板的地址位于此数据包中(由板上的DIP开关设置),则该板将切换为8位接收模式,其余所有板均会被硬件中的其他板忽略。
地址之后的第一个是带有控制命令代码的数据包。 具体来说,该委员会只招募了3个团队:
- 写入数据寄存器。 例如,通话中按钮闪烁的频率和持续时间;
- 打开按钮背光;
- 查询按钮的状态(是否按下)。
最后一个字节是校验和,它是地址后所有字节的简单XOR。
校验和之后,开发板再次进入待机模式以获取其地址。
新板开发
在开发新的接线图和印刷电路板的阶段,我没有照片,但这是这样的:
接线和接线在Altium Designer中完成。 印刷电路板的制造在Zelenograd“ Resonite ”中订购。
编写新固件
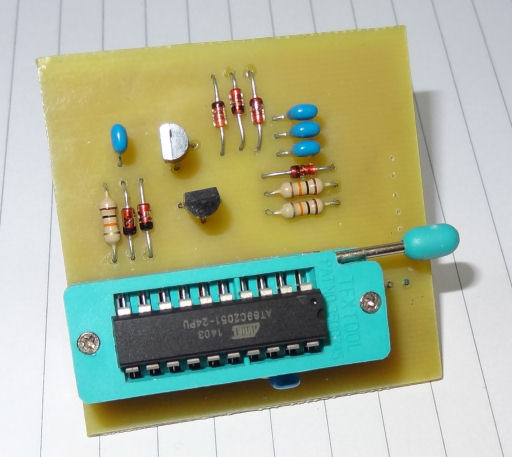
当我们的新板投入生产时,我们转到安装了此类呼叫按钮的对象,并使用arduino上组装的嗅探器检查解析的传输协议的正确性:
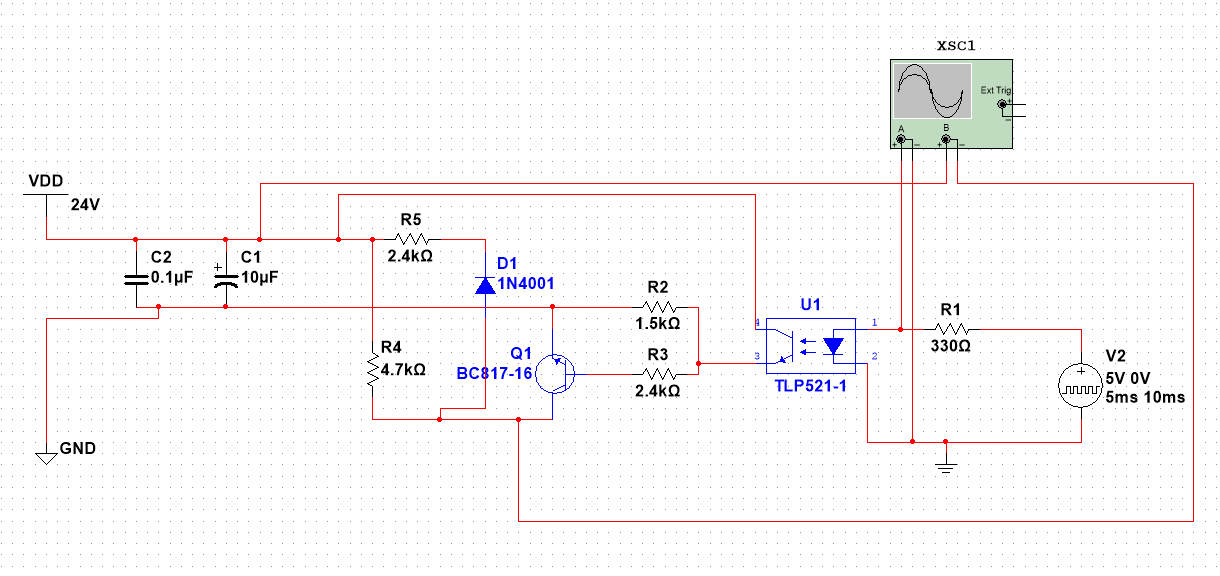
一块与原始电子等效的发射器电路。 接收器只是一个光耦合器。
谈谈我们在ICC AVR中的嗅探器
接下来,必须非常小心地采取行动,以免在电梯中燃烧任何东西并防止其停止。

我们进入通话按钮。 黄色粗线-电路板电源和传输接口。 4针连接器上的白色-连接按钮及其背光。
我们检查一切正常,修复门框并为我们的设备编写新的固件:
基于AVR ATmega328P微控制器的新板的C代码
设备和固件的简单性可以通过代码量来估计,它仅包含约600行C语言。
构建过程如下所示:
费用不同,但原理相同
我无法附上完成后的设备的照片,只是相信它仍在生产和销售中。
抒情结论
关于电梯按钮在地板上的“上”和“下”。 我注意到许多人完全不了解他们的目的,并且一次摇摇了。

从这里
电梯有两组按钮:在驾驶室中有一个订购面板,在地板上有一个呼叫面板。 您已经可以从名称中猜测到订单面板具有更高的控制优先级。
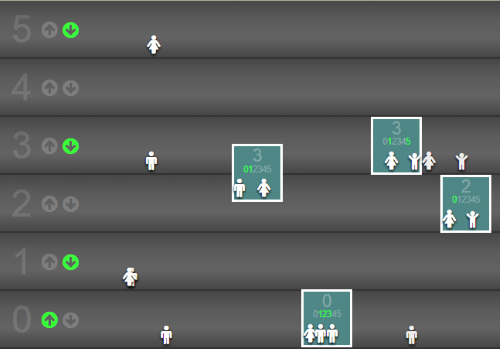
所有带有呼叫面板,带有向上和向下按钮的电梯均采用某种行程优化算法,其目的是在最短时间内运送最大人数的乘客,并在楼层上等待最长等待时间的单独条件(由国家标准规定)。
这种算法通常涉及选择楼层上的乘客,如果他们按按“上”或“下”呼叫按钮指示的相同方向行驶。
想象一下这样一种情况:载有乘客的电梯向下行驶并收到下面一层的“向下”呼叫。 电梯将停下来接客(是的,重量传感器仍在考虑客舱的负载,但我们会降低它)。
电梯继续运行,并从下面的楼层接收“向上”呼叫。 顺理成章的是,电梯不会停下来接客,因为它不会改变行进方向(这也是标准规定的),并会接送乘客上下然后走-浪费了电梯中的能量和空间。
电梯继续运行,并从下面的楼层接到两个“上下”呼叫,这是由一些急躁需要上来的乘客按下的。 电梯将停在此楼层是合乎逻辑的,但乘客不会进入该楼层,但是机舱中的人员会花一些时间来减速并停止电梯,打开门,等待,关闭门并加速至额定速度。
如果电梯在地板上只有一个按钮,则在99%的情况下,电梯将根据“集体下降”算法运行,并且如果机舱中有命令,则仅在下降时才停止。
如果您具有JS编程技能,则可以尝试在在线游戏Elevator Saga中实现类似的控制算法。 它具有优化行程的所有方面,而无需像电梯安全电路的操作那样深入了解核心。
在电报频道中,我张贴了类似的材料。 现在,您可以在其中跟踪下一个设备的开发。