
海豚1是一个小型的带向导的救生圈,在某些情况下,它比救生员能更快地解决水上麻烦。 该设备可以以高达15 km / h的速度在水中滑行,其操作员可以对其进行监控并在500米的距离内对其进行控制。
问题
在水上发生事故时,时间要花几秒钟,而且即使对受过训练的救援人员而言,组织人员救援也需要清晰,快速的反应并快速执行某些动作的机械设置,这些动作要准时开始而不会浪费宝贵的时间,这可能不足以成功进行救援。

另外,救援人员并非总是有机会迅速对情况做出反应并溺水而亡,因为水灾现场可能在很远的地方而不是在那儿迅速游泳,将救助艇下水也需要相当长的时间,而且这种情况并不总是存在。
解决方案
为了避免溺水,越来越多的人开始使用可以远程控制的小型机器人结构。
一种这样的设备是Dolphin 1移动救生圈。

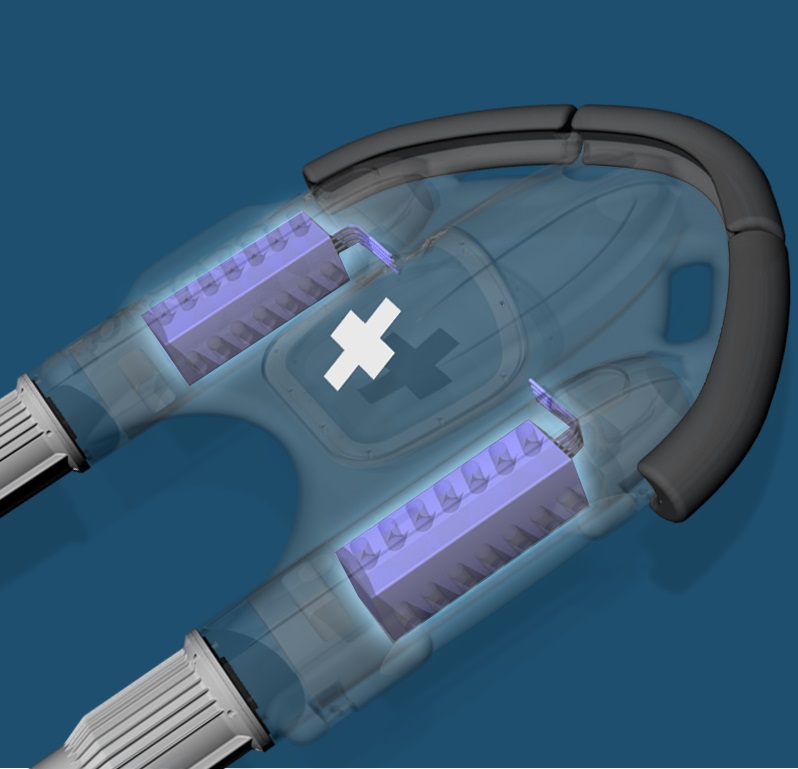
这是该设备的原型在工业生产开始之前的样子:

经过一系列测试测试和结构改进,OceanAlpha工程师得以实现了移动救生圈的全部功能,现在可用于组织紧急救生行动。
Dolphin 1 Smart Remote Water Reser的规格:
- 耐损坏,耐用的塑料亮橙色机身(能够支撑成年人的体重,其设计能够使两个人保持足够的漂浮时间,直到获得帮助为止);
- 身体上有一个特殊的前部软保险杠,以最大程度地减少对水中受伤人员的意外影响;
- 箱子的鼻子附近有两个提手,边缘有特殊的绳索,水中的人可以自由,安全地抓住这些元件。
- 外壳上有两个受保护的雾灯,以便在可见性差或有雾的情况下从视觉上识别设备。
- 设备尺寸:115x83x21cm(LxWxH)-足够紧凑,具有用于此类任务的平均尺寸(设计成让疲倦的游泳者可以像躺在木板上一样躺在上面)
- 遏制重13公斤(方便捡起并立即短距离和从小高度倒入水中);
- 每个有两个带有金属保护外壳的电动喷水推进器,对推进器的这种保护可防止藻类和碎屑进入其机构内部,并确保救援人员的安全;
- 两个分开的可充电电池,位于电池盒内的特殊保护隔间中,即使在对电池盒造成较小损坏的情况下,电源系统和设备推动器也可以正常工作;
- 浮力22公斤(约占成人体重的20%);
- 一次充电30分钟即可保持引擎的电池寿命;
- 最高速度为15 km / h(9.3 mph),当在要保存的人的身体上运输时,速度较小,并且取决于人在设备上的固定方式;
- 控制系统的最大工作范围是500米\ 1640英尺(操作员的遥控器<->设备)。
顶视图:

底视图:

水炮的布局:

受保护的电池仓的位置:
遥控器:

推进喷嘴:
在设备顶部,分别有每个发动机的充电和速度指示器以及手动控制按钮,以用于带有遥控器的救助者(操作员)在信号接收区域之外,并且获救人员可以独立指示“海豚1”游泳正确的方向。

此外,在该设备的第一个版本中,没有指示器和按钮:

然后工程师开始尝试对案件进行不同的安排:


并决定使用此选项:

Dolphin 1没有专用的充电站,假定电池电量耗尽后,每次必须将设备手动连接到外部电源系统,并且充电过程完成后,必须将其返回到救援站的特殊位置以执行战斗任务。
海豚1号的住宿选择



设备的操作模式:由操作员远程控制,手动模式。
远程水救星“海豚1”的工作原理:
- 在救援人员警告水面发生危险情况后,救援人员用手从存放处取出海豚1;
- 此外,将“海豚1”沿其运动方向扔入水中;
- 救生员(操作员)使用遥控器打开Dolphin 1引擎;
- 救生员(操作员)将“海豚1”带到需要水上帮助的地方;
- 如果在海豚1沿着波浪快速移动的过程中,救援人员(操作员)可以使用遥控器将海豚1翻转回去(在这种情况下,使用某种发动机模式);
- 在“海豚1”到达需要水上帮助的地方后,救援人员(操作员)借助“海豚1”上的标准摄像机可以评估情况,溺水者可以抓住“海豚1”;
- 一旦水中有人固定在“海豚1号”上,救援人员(操作员)就会将“海豚1号”返回救援船或帐篷的部署地点,并向已经在岸的受害者提供帮助。
翻转模式:
搬运设备的手柄:

救生员将海豚1抛入水中:

带有遥控器的操作员:


使用遥控器管理“海豚1”:



海豚1号水上受伤的人:


营救者(操作员)将“海豚1号”与受害人一起上岸:

救援人员会见并把受害者抬到岸上:

救生员从水中捡起海豚1:

海豚1在水和波浪上滑行:


Dolphin 1远程注水救助机已经投入批量生产
,建议零售价为5500美元 。
 链接到设备制造商的页面
链接到设备制造商的页面 。