远程现实概念的诞生
我的“疯狂”项目的历史始于三年前,当时我的朋友勒莎在考虑游戏行业发展的未来前景时说: “想象一下一个未来,世界各地的人们以娱乐的形式在诸如这样的游戏场上操作真正的机器人”头像。”

这个想法最初对我们来说似乎很有趣,并且不难实现。 我们立即坐下来寻找类似的项目,并惊讶地发现没有人做过这样的事情。 这似乎很奇怪,因为这个想法实际上是“表面上的”。 我们发现了许多业余原型项目的痕迹,它们都采用了基于Arduino的摄像头的底盘形式,但是没有人得出任何合乎逻辑的结论。 后来,克服了看似无穷无尽的困难和问题,我们了解了缺少类似物的原因,但最初,这个想法对我们来说似乎非常简单且迅速地实现了。
下周我们致力于概念开发。 我们设想了数十种具有不同功能和数百种游戏范围的机器人,在这些机器人之间,玩家可以立即移动“传送带”。 根据我们的“决定”,任何想要的人都有机会建立自己的各种规模的游戏训练场。
我们立即决定,这些想法更适合娱乐性景点的概念,而不是计算机游戏。 人们喜欢娱乐,想要新事物,我们知道能为他们提供什么。 就像在任何行业中一样,投资回报问题立即浮出水面,因为乍一看似乎我们的物理模型受到机器人数量的限制。 但是,将机器人乘以24小时和5到10美元一小时的价格,疑问就消失了。 财务模型不是克朗代克模型,但即使在负载为10%时也能获得回报。
很快,一个新概念的名字就出现在我们的脑海:远程现实,类似于虚拟现实和增强现实。

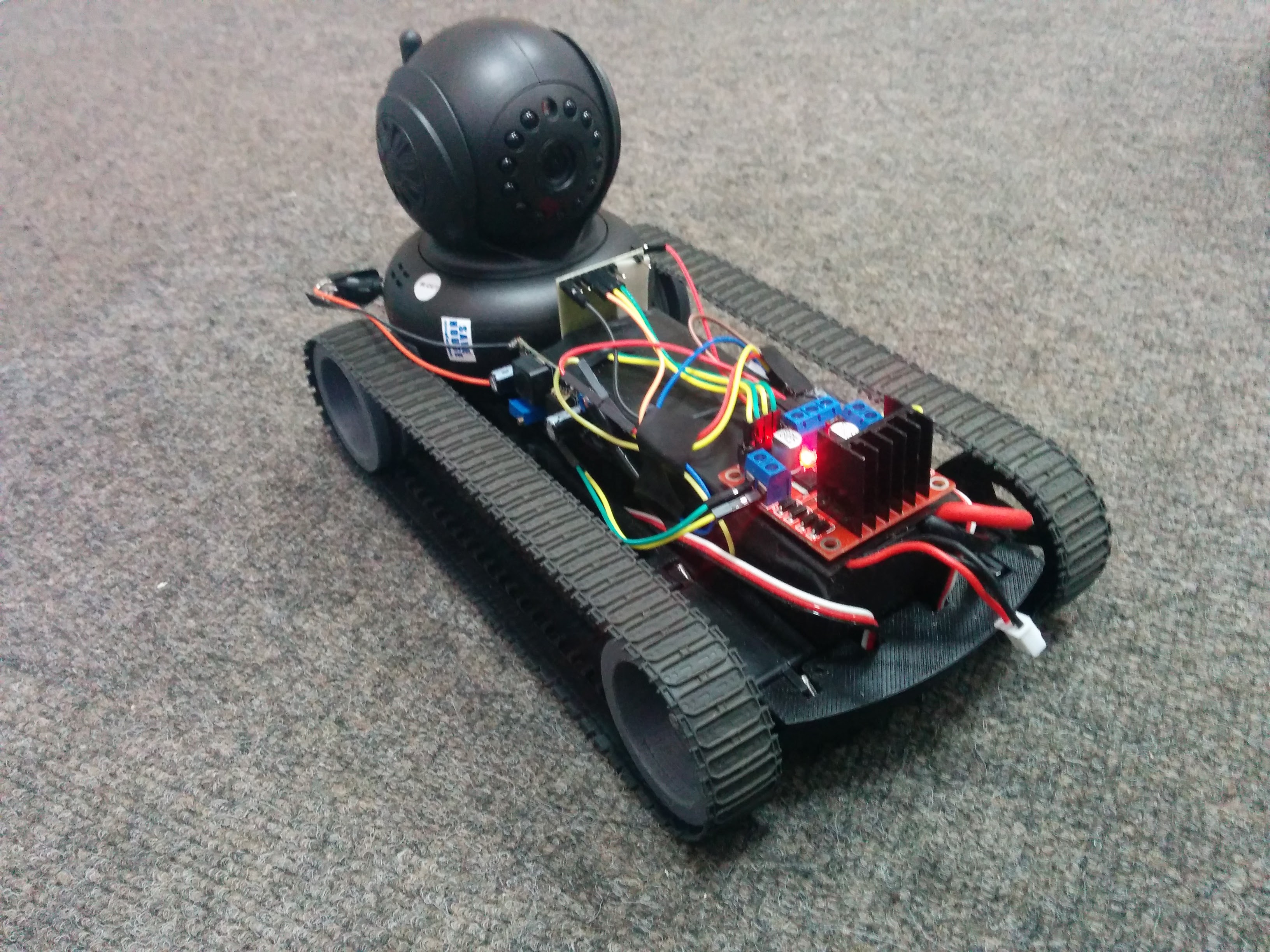
像其他“实验者”一样,首先,我们将机器置于无线电控制上,在其上放置了中文Wi-Fi摄像头,安装了Arduino开发板,然后我们的机器人“通过了”。 我们要求来自美国的朋友通过互联网连接打字机。 他能够绕我们的办公室骑,我们感到很高兴。 在几秒钟内,控制和视频流的延迟对我们来说似乎不是问题。
从这一刻起,我们将工作分为两个领域:
普里皮亚季市的格列佛
我将从一个训练场开始我的故事。 我们知道人们必须在某个地方玩。 这个地方必须举世闻名,“神秘”并且技术实施不复杂。 经过许多选择,我们突然想到了切尔诺贝利的想法。 切尔诺贝利区满足了我们的所有要求,最重要的是,将来所有可能发生的故障和对运动场的破坏都可以归因于末日站。
找到面积为200平方米的房间后,我们开始工作,最终持续了两年。 我们绘制了街道和房屋的纹理,创建了包括内部地板在内的建筑物的三维模型。 然后,他们从刨花板和胶合板中切出所有东西,从成百上千的不同部分组装成建筑物。

我们试图尽可能准确地重新创建Pripyat的所有纹理,在Google地图上“间谍”。 当然,房间的大小不允许我们精确地创建所有内容,并且我们也不想错过细节,因此,例如,我们不得不将切尔诺贝利核电站移至普里皮亚季附近。
很难计算出我们花了几百块木板,数十张胶合板,纤维板和其他“消耗品”。 在过去的三个月中,我们几乎用画笔和颜料四处爬网,装饰房屋和地板。 我们想要最大的细节。 这座城市的规模原来是1:16,房屋高9层,大约与成年人的胸部高度相当。 在这座城市里,我们感觉就像是真正的巨人。

关于我们的一点
然后可能是时候谈论我们的团队了。 最初,我们只有两个工程师朋友。 考虑到该项目,我们了解到很难找到这样一个“冒险”想法的投资者,因此我们决定为自己的钱做一切。 在工作中,许多人帮助了我们。 有人是免费的,有人是我们雇用的人。

团队合作的一个很好的例子是3D打印的故事。 我们组装了打印机并首次自行打印了零件,直到得出结论,您不能在所有方面都是专家。 印刷花了我们很多时间,零件的零件很大,零件印刷结束时的意外婚姻破坏了我们的所有计划。 结果,我们找到了一个“狭窄的” 3D打印专家,后来成为了我们团队的一员。 在分享了我们的梦想之后,他帮助我们仅用了塑料就制造了机器人。
收集机器人,我们离不开特纳的帮助。 我们的一位朋友帮助了我们。 垃圾填埋场的建设工作通常需要非标准和复杂的解决方案,我们很荣幸认识到在这些问题上也积极帮助我们的家伙。
该项目对设计师,艺术家来说非常幸运,他的才华非常宝贵。



为了尽可能节省游戏领域的建设,我们必须自己做几乎所有事情。 但是除了庞大的训练场外,还有一个技术部分...
击败视频延迟
当然,对项目的工程实施问题比对我们的“城市规划”的描述更有趣。
让我们回到您记得记得将相机放在“推车”上并能够控制它的时刻。 之后,是时候选择硬件和技术来创建我们的机器人了。 在这里,第一个惊喜就在等待着我们:经过十几个摄像头之后,我们无法实现信号延迟,而通过互联网控制机器人会感到舒适。 在中国订购相机样品并进行测试所需的时间使一切变得复杂。
我们希望使机器人控制系统完全在浏览器中,而无需任何“下载我们出色的客户端”和过时的Flash播放器。 这大大缩小了支持它们的技术和相机的范围。 我们对MJPEG格式的视频流的传输进行了长时间的试验,但最终我们放弃了这一想法。 这些实验使我们损失了六个月的时间。 我们甚至完全组装了前五个机器人,并为所有人启动了开放测试,但是...
实时测试表明,一旦我们尝试优化图片分辨率,路由器就无法处理来自多个机械手的MJPEG格式的巨大视频流。 来自一个机器人的视频流不能小于20-30 Mbit,这使得我们计划的20个机器人无法稳定同时运行。 同样,我们也找不到没有延迟的现成的声音传输解决方案。 这导致我们不得不再次搜索适合于我们任务的技术。
结果,我们选择了WebRTC。 这确保了我们仅以0.2秒的延迟传输视频图像和声音。

然后是时候模拟和组装机器人了。 为了减少对外部供应商的依赖,我们在3D打印机上打印了机器人的所有详细信息。 这使我们能够创建最紧凑的机器人模型,并最佳地将所有电子设备和强大的电池放入其中。
电力系统
下一个问题与电源有关,因为我们确实希望尽可能少地更换电池。 经过许多现成的选择之后,我们选择了由Panasonic 18650B的组件组装而成的电池。 17伏的电池电压和6800 mAh的容量使我们的机器人一次充电即可行驶10-12小时。

在实验过程中,我们成功地``杀死''了一百个元件,因为我们想最大程度地利用这些元件的容量,并且放电结束时的电压会很快下降,并且我们安装在分压器上的简单电压指示器并不总是能提供准确的读数。 但是最后,我们将最小允许电压的阈值从2.5伏提高到3.2伏,此外,我们设置了一个微电路以进行精确的电压控制,松下的“死亡”案例也就停止了。
作为充电器,我们选择了在建模者中很流行的iMax B6设备,并可选择在元素平衡模式下进行充电。 由于iMax B6中文副本的校准不当,我们“杀死”了一些电池。 我们连接了五个罐,并以平衡模式充电。 充电结束时,检查了电池的总电压,而没有将其分成电池,但实际上一个电池组没有充满电,因此先“没电”。
机器人马达
当然,你们中的许多人都问过自己一个问题:为什么要17伏? 答案在于电机。 在选择相机之后,马达是我们“中国折磨”的第二部分。 我们讨论了许多不同的引擎。 令我们震惊的是,几乎所有人都只有很少的资源,很快就失败了。 经过3-4个月的实验,我们在可靠性方面设法找到了“普通”电动机的制造商,但仍然没有最终解决方案。
在常规机器中,变速器在将动力从发动机传递到车轮方面起着关键作用。 我们没有。 通过降低电动机上的电压,我们成功降低了机器人的速度,但同时失去了动力,我们的“油箱”无法缓慢转动。 很快我们解决了这个问题。
哦,我说的是“ tanchiki”。
为什么是“坦克”?
为什么是“坦克”呢? 答案很简单。 如果我们将未知的Internet频道延迟添加到摄像机延迟中,那么一些澳大利亚居民将只能舒适地控制相对较慢的内容。 这是赞成选择坦克的第一个论点,而第二个论点最终使我们信服,那就是对机器人的舒适控制。 人们习惯于单击右侧的“箭头”以等待机器人向右旋转,没有毛毛虫就无法做到,因为只有水箱在“原地”旋转。 我们对预期的“超级越野能力”也感到满意。 在中国订购了一盒橡胶履带后,我们开始在履带下印刷“滚轮”。

最初的测试使铁匠们的梦想破灭了,毛虫在撞到低矮的障碍物时常常从坦克上飞出来。 在研究了油箱力学的基础知识并尝试了不同的张紧轮和辅助轮之后,我们仍然没有解决这个问题。 我不得不和毛毛虫分开。 由于已经进行了机器人的印刷和组装,我们不得不寻找一些快速而简单的解决方案,但这是一回事-带有橡胶胎面的优质车轮。 以及您如何现场询问? 通过将两个轴与3D打印机上的细带子链接在一起,我们“摆脱了”。 总的来说,我们得到了具有全轮驱动和旋转功能的轮式机器人。

机器人心脏
我们已经讨论了机器人的大多数元素,并且没有谈论最重要的组件。
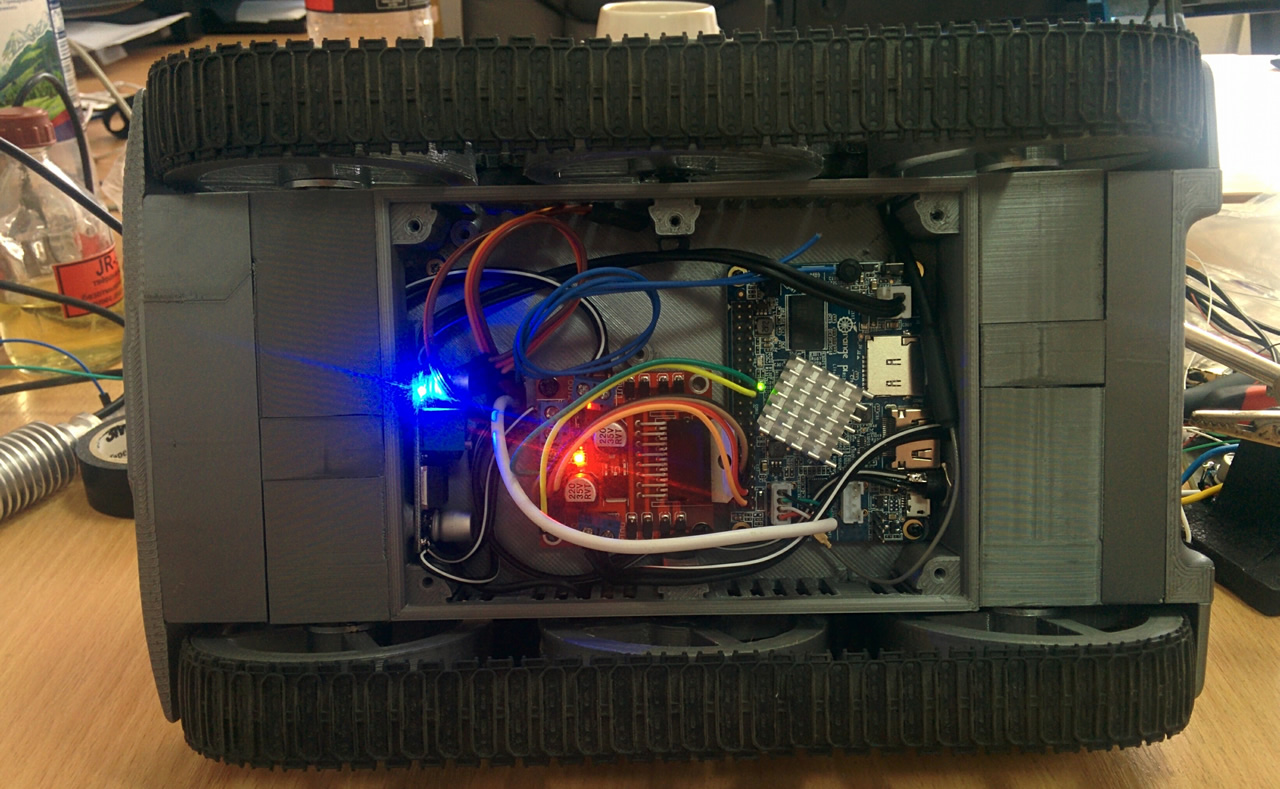
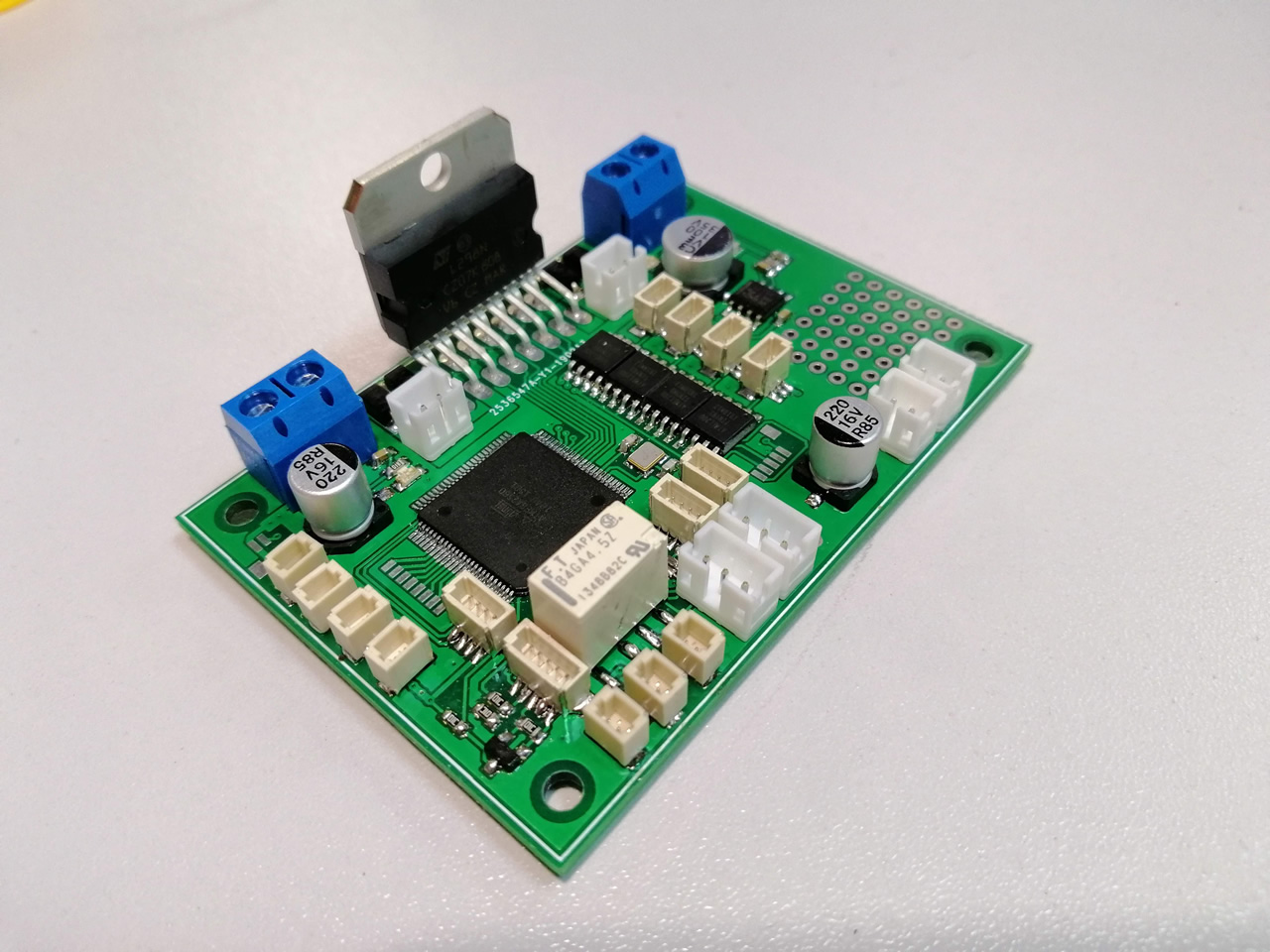
我们的机器人基于Linux OS上的Raspberry Pi微型计算机和专门开发的软件,该软件可使机器人与服务器进行通信。 Raspberry Pi与我们的监控板配合使用。 该评估板包括一个微控制器,一个电动机驱动器,来自各种传感器的信号处理芯片以及一个用于精确控制电池电压的模块。 为了便于组装,我们在单独的连接器上实现了所有外围连接。
正如我之前提到的,当我们面对无法预料的问题时,我们常常不得不更改组件。 这次也发生了。 最初,为了节省资金,我们在Orange Pi上组装了第一批机器人。 将来,我们必须用Raspberry Pi 2 B代替它们。但这还不是终点。 我们很快又不得不用Raspberry Pi 3 B +的版本替换该微型计算机,该版本在WiFi上具有5 GHz模块。 但是稍后会更多。
Wi-Fi设定
等待我们的下一个问题是Wi-Fi无线电频道。 我们仅通过立即启动10个运动中的机器人进行测试就知道了这一点。 我们的垃圾填埋场位于一个封闭的地下室中,钢筋混凝土墙的“重新反射”简直是可怕的。 控制命令执行得很好,但是当其中一个机器人离开房间的最远角落时,视频流疯狂地“减速”。
从2.4 GHz到5 GHz的过渡帮助我们应对了信道负载。 但是困难并没有就此结束。 如果机器人在拐角处行驶,则信号会下降到-80 dBm以下,并且会开始刹车。 最后,我们通过安装具有分集接收功能的扇形天线并将发射机功率提高到半瓦来解决了该问题。 当然,必须使用功能强大的处理器从业务解决方案领域“挑选”路由器。
值得一提的是,我们没有增加功率,而是尝试了很长一段时间来基于Ubiquity解决方案配置“无缝”漫游模式,但是可惜,我们需要“拒绝” Wi-Fi模块来支持它,但是iPhone可以完美地在几个接入点之间移动。


收集了“十”个机器人并启动了监视和控制服务器之后,我们于2018年11月通过Isotopium Chernobyl项目来到了Kickstarter。 我们甚至没有意识到成千上万的人会很快尝试我们的游戏。
在下一篇文章中了解我们的未来文章以及为什么几乎要关闭该项目: 通过互联网控制RC模型的在线游戏
