系列文章:
8.我们从电话控制ROS控制,GPS节点7.机器人本地化:映射,AMCL,房间地图上的参考点6.带轮编码器的里程表,房间地图,激光雷达5.我们在rviz和凉亭中工作:xacro,新传感器。4.使用rviz和gazebo编辑器创建机器人仿真。3.加速,更换相机,固定步态2.软件1.铁开始研究ROS(机器人操作系统)时,首先让您惊讶于“一切都很复杂”,这是有关主题,节点,动作的信息,您的头在旋转。 并且,第一个愿望是恢复使用良好的旧脚本来管理机器人。 但是没有 每个成年男子都应该少收集一些会开车,眨眼,尖叫的男子的东西。 选择ROS作为平台,因为它仍然是无情的arduino世界中机器人开发的下一步。 建议组装ROS“推车”,它不仅便宜,而且功能强大:它可以与猫,您的身体一起骑在地板上:)第一步将是:
更多歌词
研究ROS时遇到的第二件事是市场上平台的成本。 一套乌龟汉堡(
作为负担得起的汉堡
之一 )-549美元(34,500人)。 其他所有东西都更加昂贵。 在这里,可以说价格的最大份额是激光雷达,这是一种确定机器人在太空中位置的装置。 本身就不足15k p。 但是,所有其他组件也不便宜。
让我们计算一下我们的“购物车”要花多少钱:
总计:8000羽
价格也很高,但比乌龟便宜一个数量级。 如果需要,可以在3d打印机上打印汽车或拿一块胶合板。 然后只剩下直流电动机。 覆盆子电池也可以用便宜的模拟电池代替,主要是它提供5V 3A的电流。
我们收集该项目基于先前存在的项目
-www.rosbots.com/build_it ,但进行了重大修改。 另外,根据站点的信息判断,该基础项目已被放弃,因此您必须自己考虑所有事情。
电动机的组装和安装开始与上述说明类似:
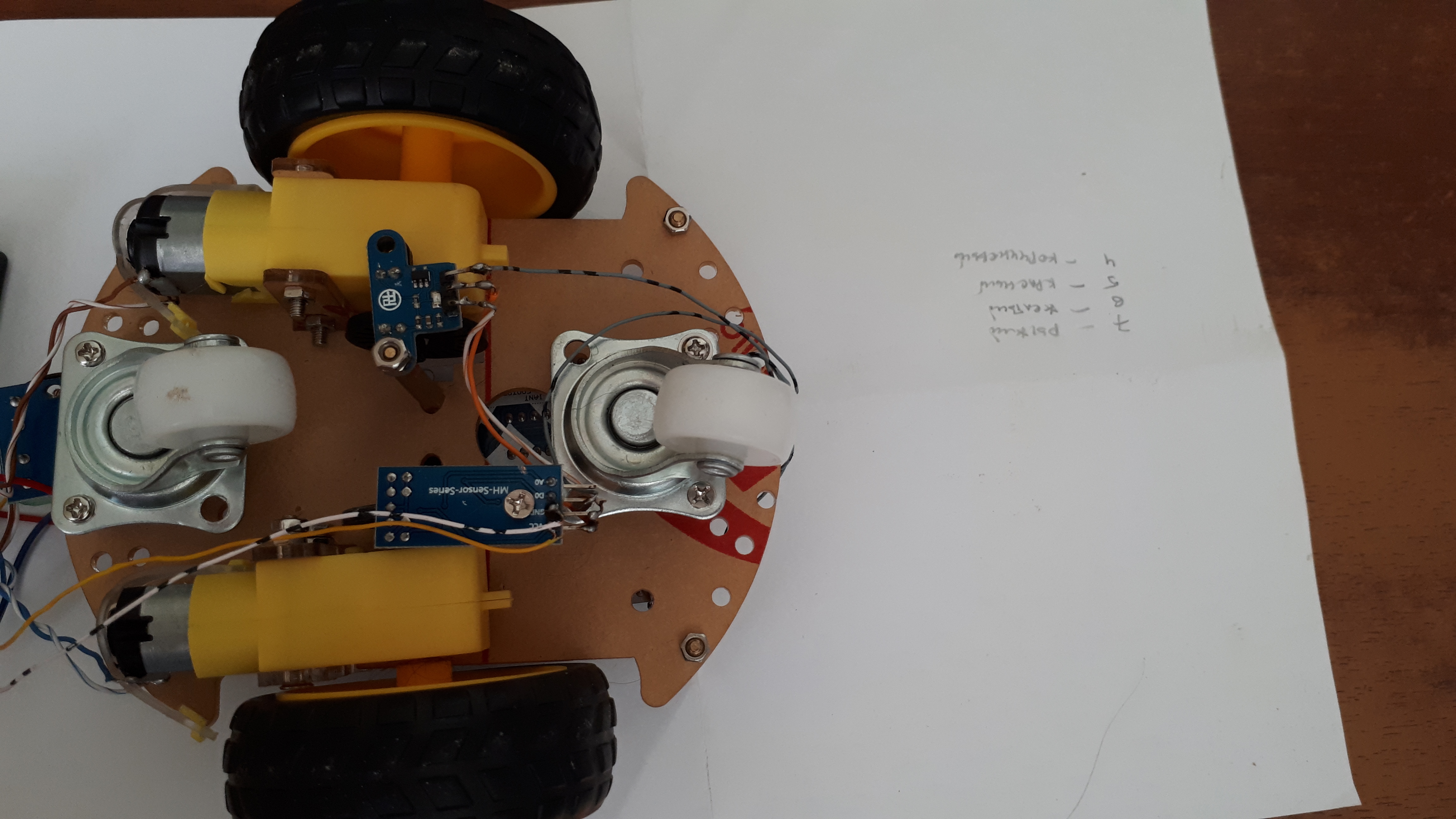
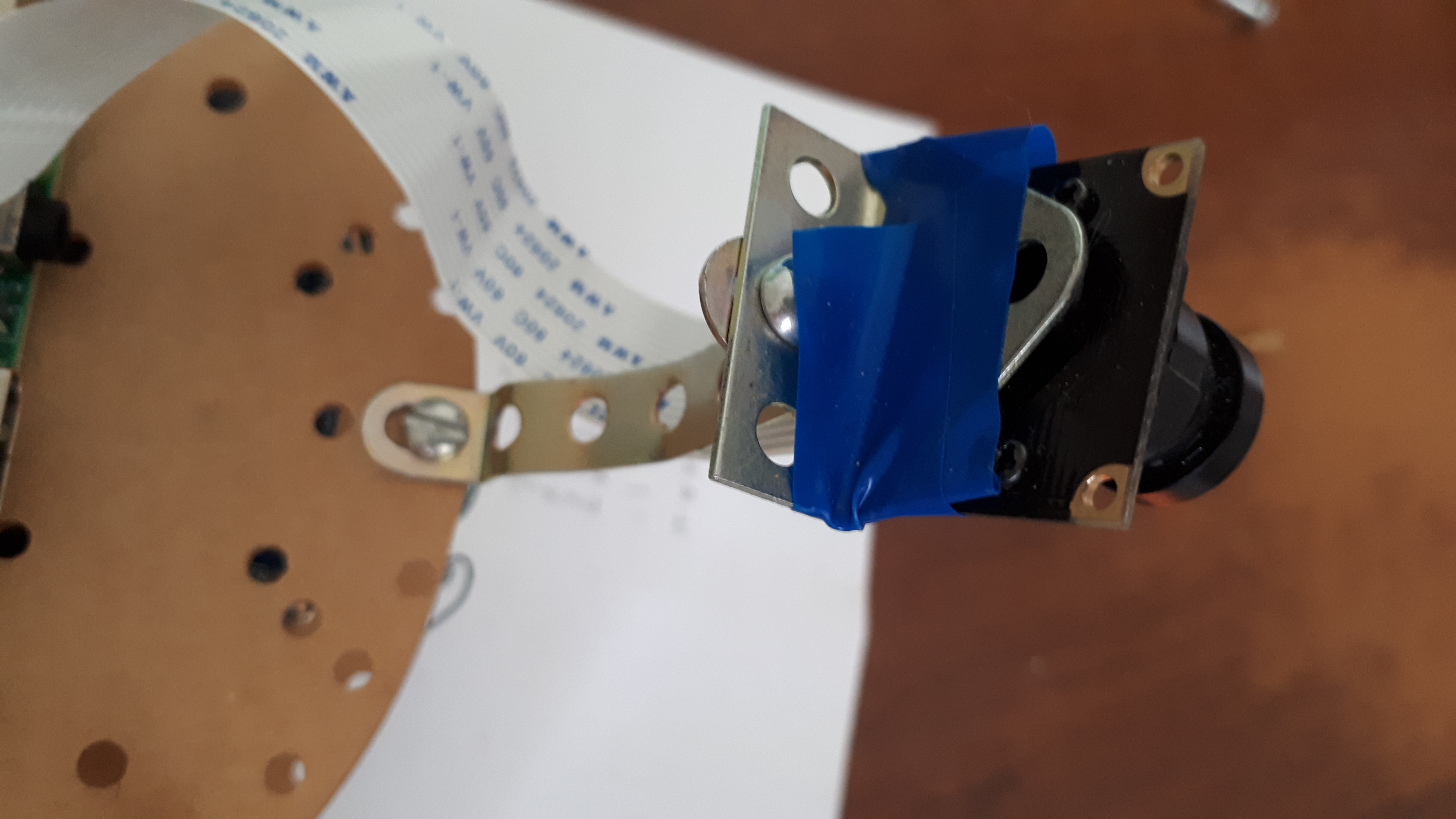
在这里,您需要注意编码器,编码器的安装方式使它们可以“盖住”安装在电动机上的带有插槽的光盘:
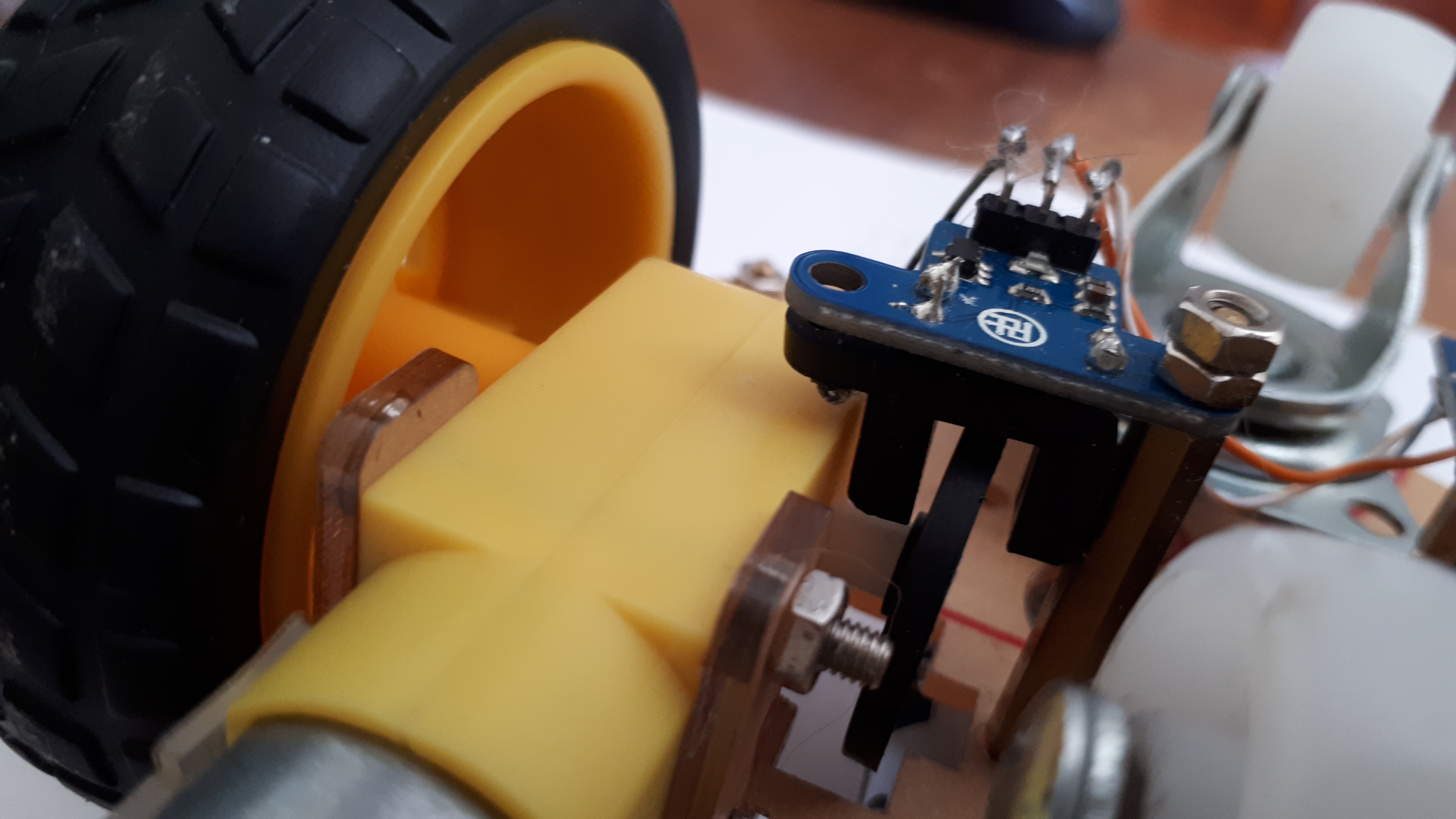
*通常,编码器用处不大,您无法安装它们。 光学编码器允许您确定行进的距离,但不幸的是,它们不允许您确定运动方向。
在安装了电动机和编码器(可选)之后,我们将电线连接到uno arduino,发动机驱动器和2块18650电池的电池仓,其连接图与基础项目网站上发布的连接图类似,唯一的区别是:

编码器可使用arduino获得5V(来自5V arduino的右速度传感器和左速度传感器的VCC)。
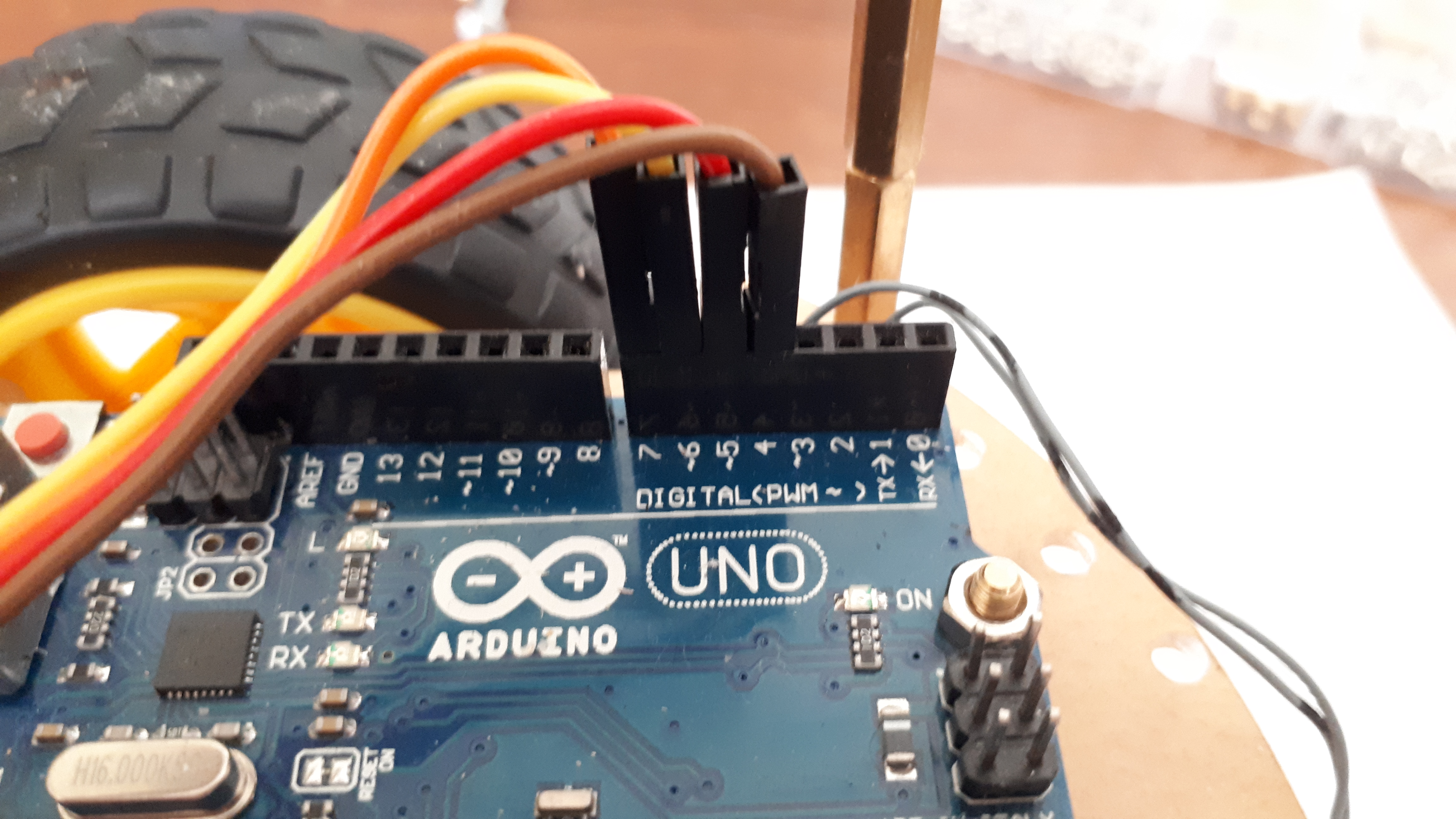
我们修复了arduino和引擎驱动程序,并为驱动程序提供了动力:

面条更紧密:
引擎驱动程序。 绿色端子包含来自电动机的成对电线:

Arduino不会由电池供电,它将通过USB进一步连接到覆盆子。
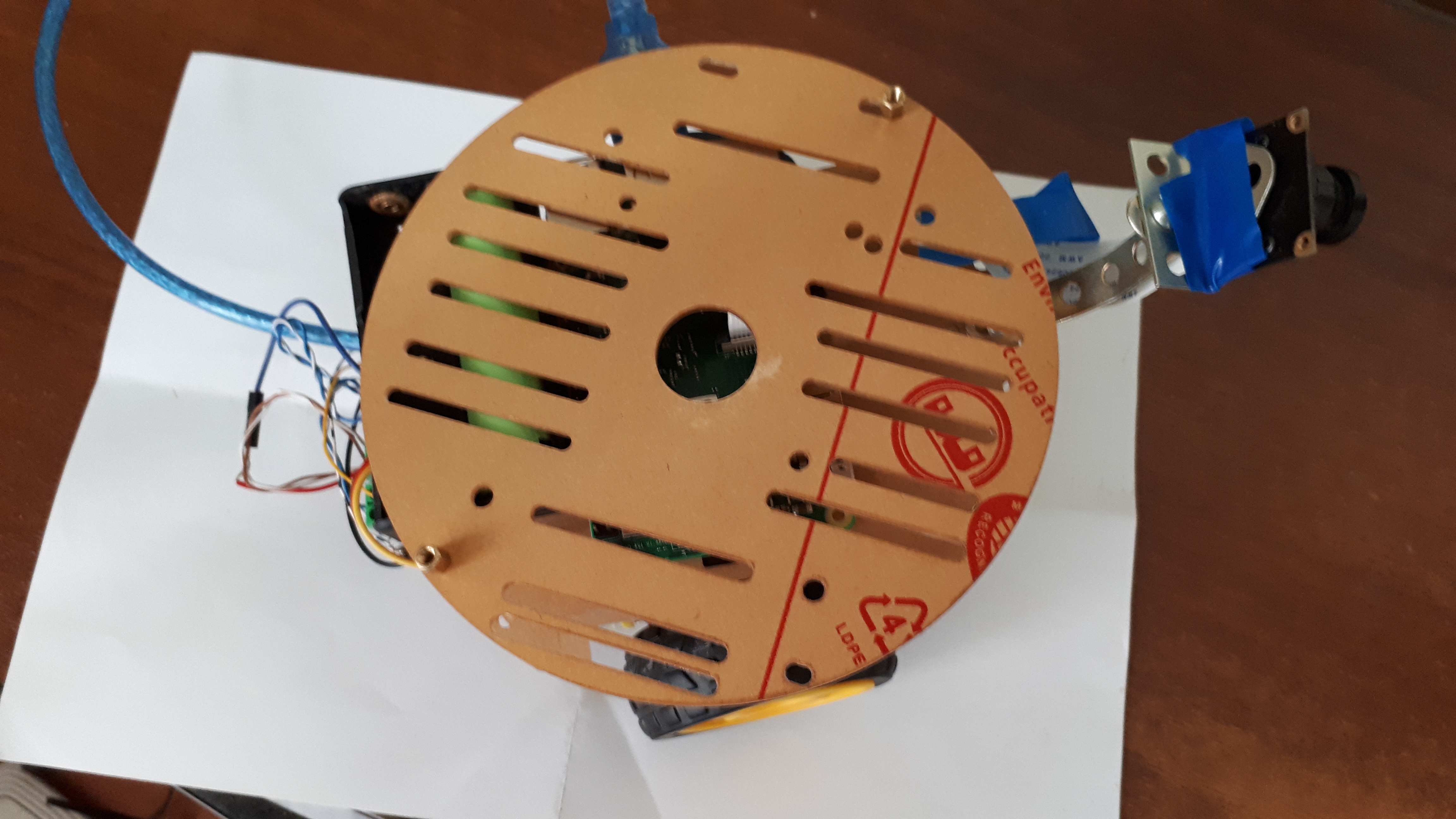
我们把机器的第二层
这是位于电池盒,树莓派,照相机上的苏联设计师的细节图片:
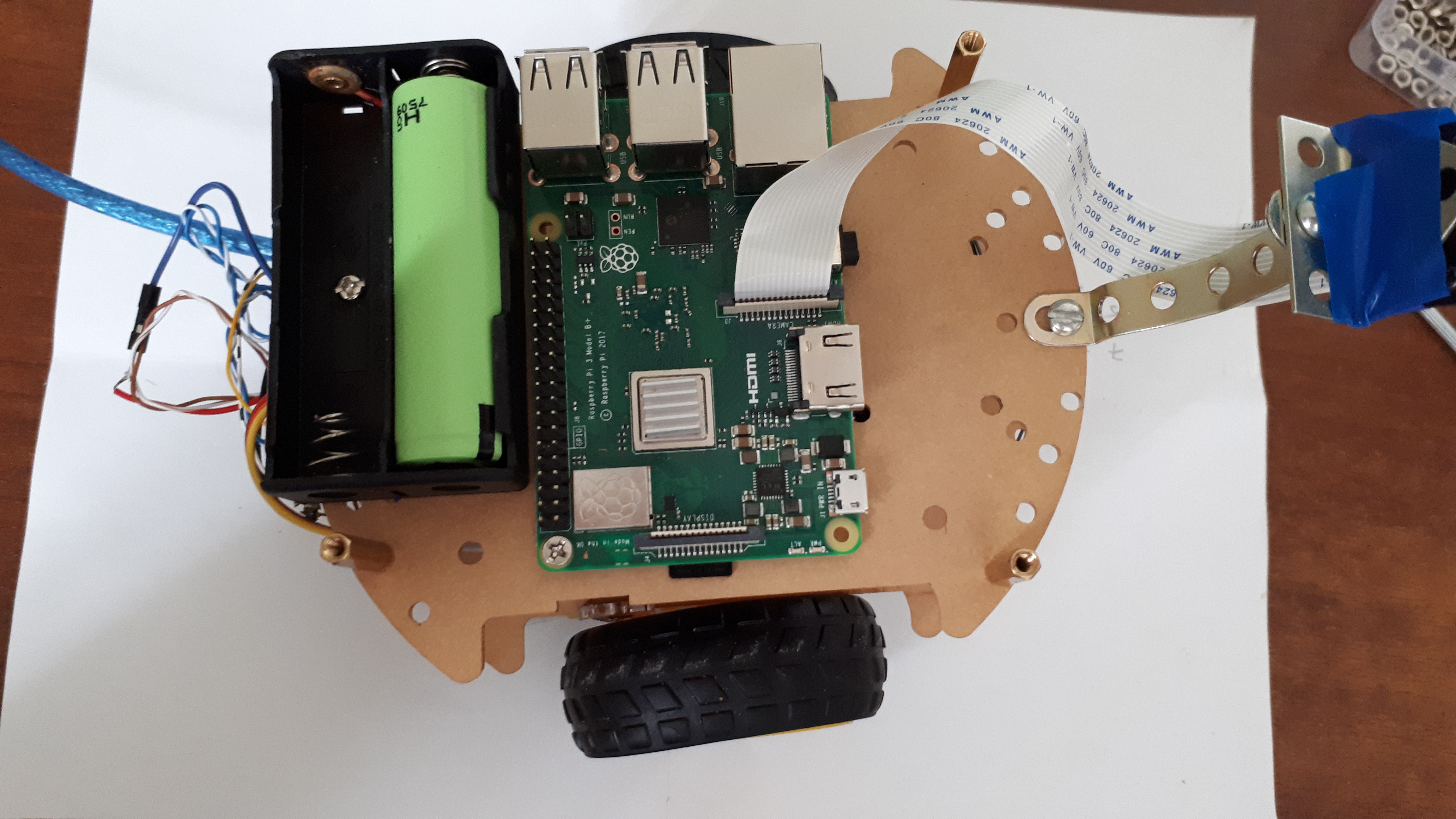
不要忘记将相机的电缆正确插入树莓派:

苏联设计师:
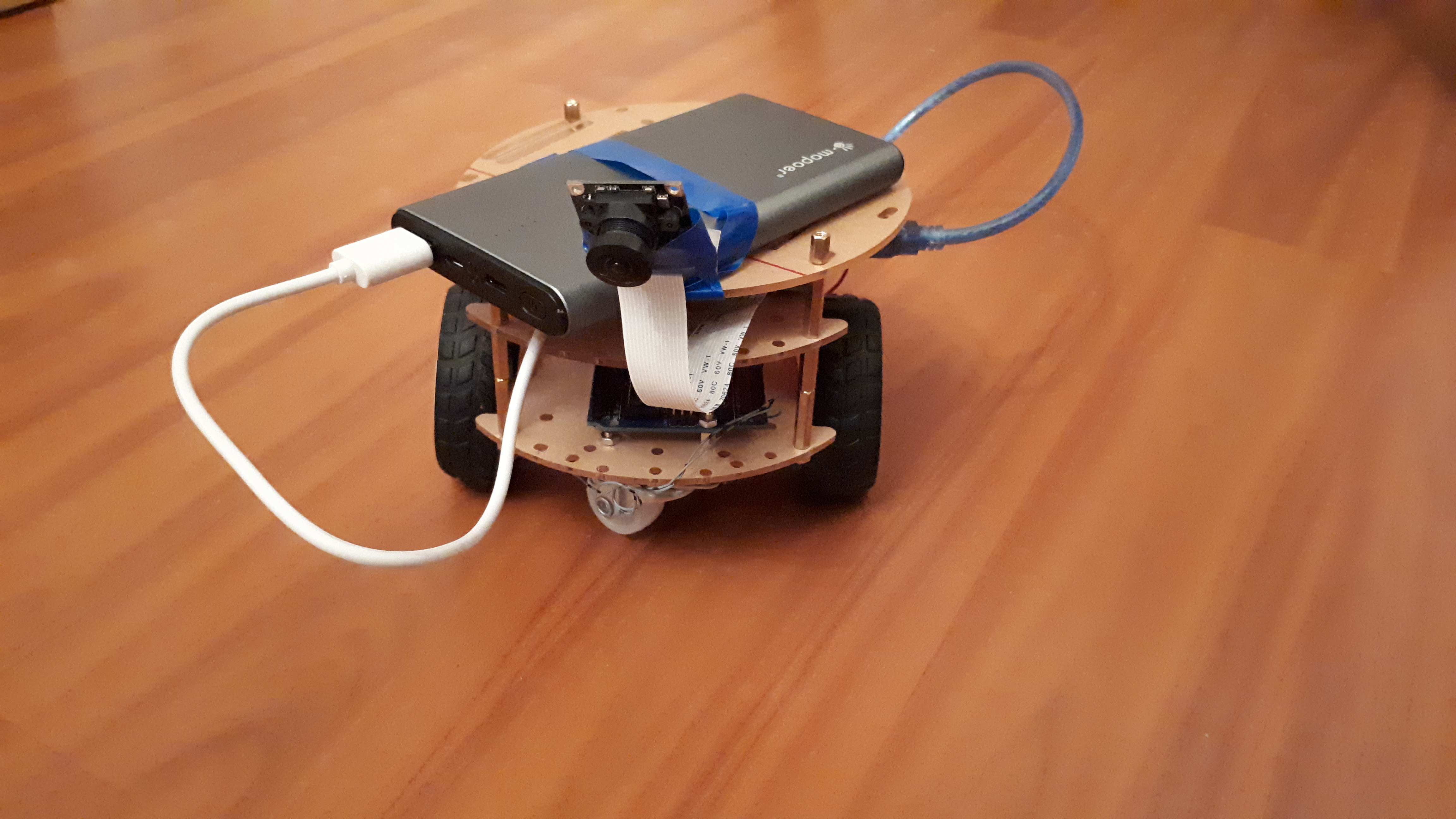
 关闭汉堡,即“小推车”的第三层
关闭汉堡,即“小推车”的第三层 。
这将为树莓派移动电源:

*关于为树莓派供电的Powerbank的一些知识:
:
一切都准备好了!
在以下文章中,我们将直接讨论ROS,线条,身体,猫和微笑。
欢迎提供技巧和无情的批评!
*接线图已更新。