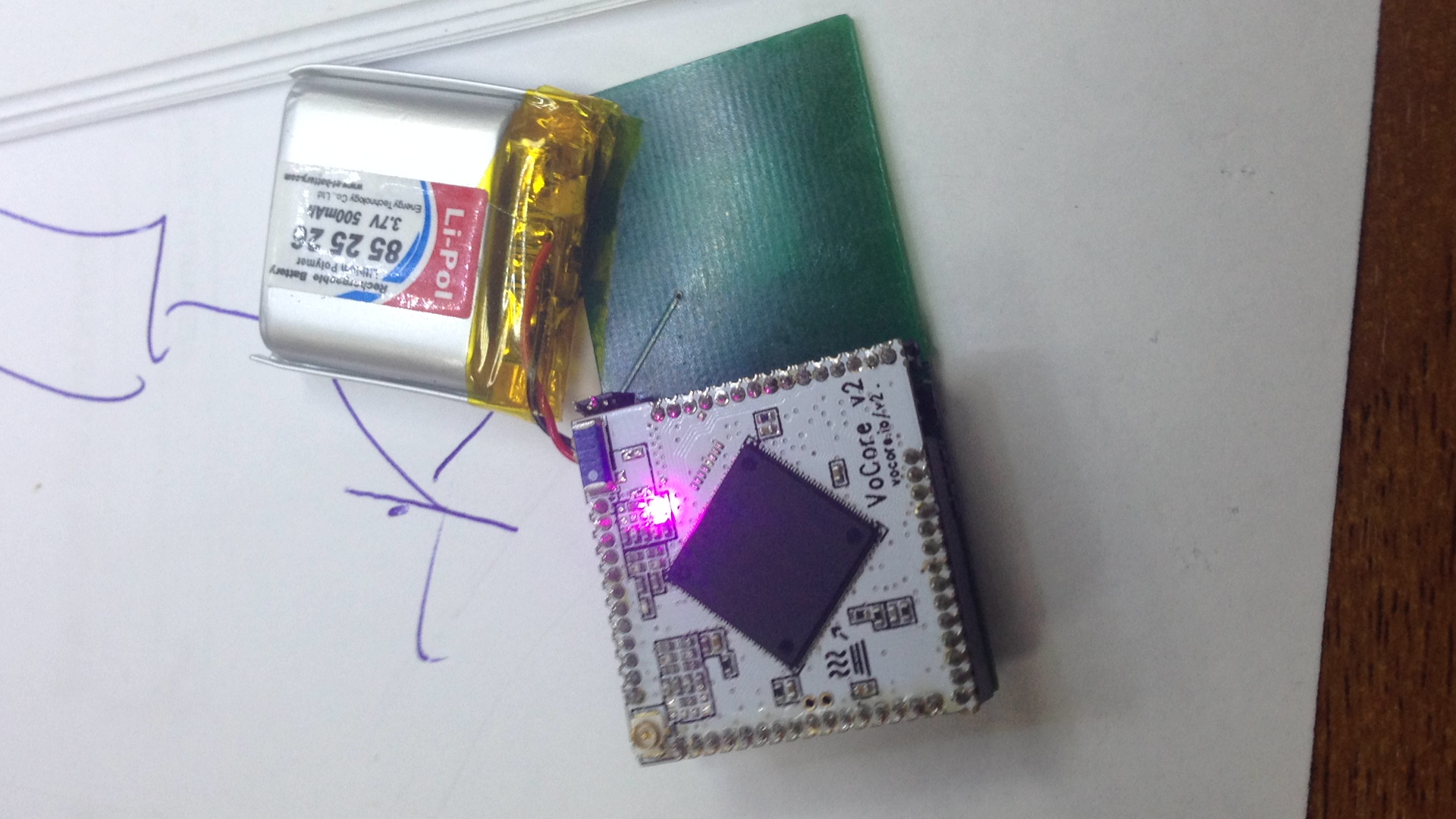
“糟糕的一天比工作的好一天要好。” 有大量的电子咬报警器。 我的版本的特点是WiFi带有WEB应用程序,加速度计和无线充电,防护等级IP68。 该设备的大脑是最小的
Vocore2 Linux计算机,
MPU6050加速度计,基于
BQ51050BRHLT的 Qi充电
功能 。 可以在这里下载源代码。
FishSensor的规格:
- OpenWrt操作系统15.05.1“ Chaos Calmer”;
- 与移动设备的WiFi连接;
- 通信范围30-50 m;
- 咬合控制-声音(仅限Android),视觉;
- 远程设置灵敏度,旋律,音量;
- 互联网是可选的;
- 电池寿命3小时(LiPo 500mAH电池)
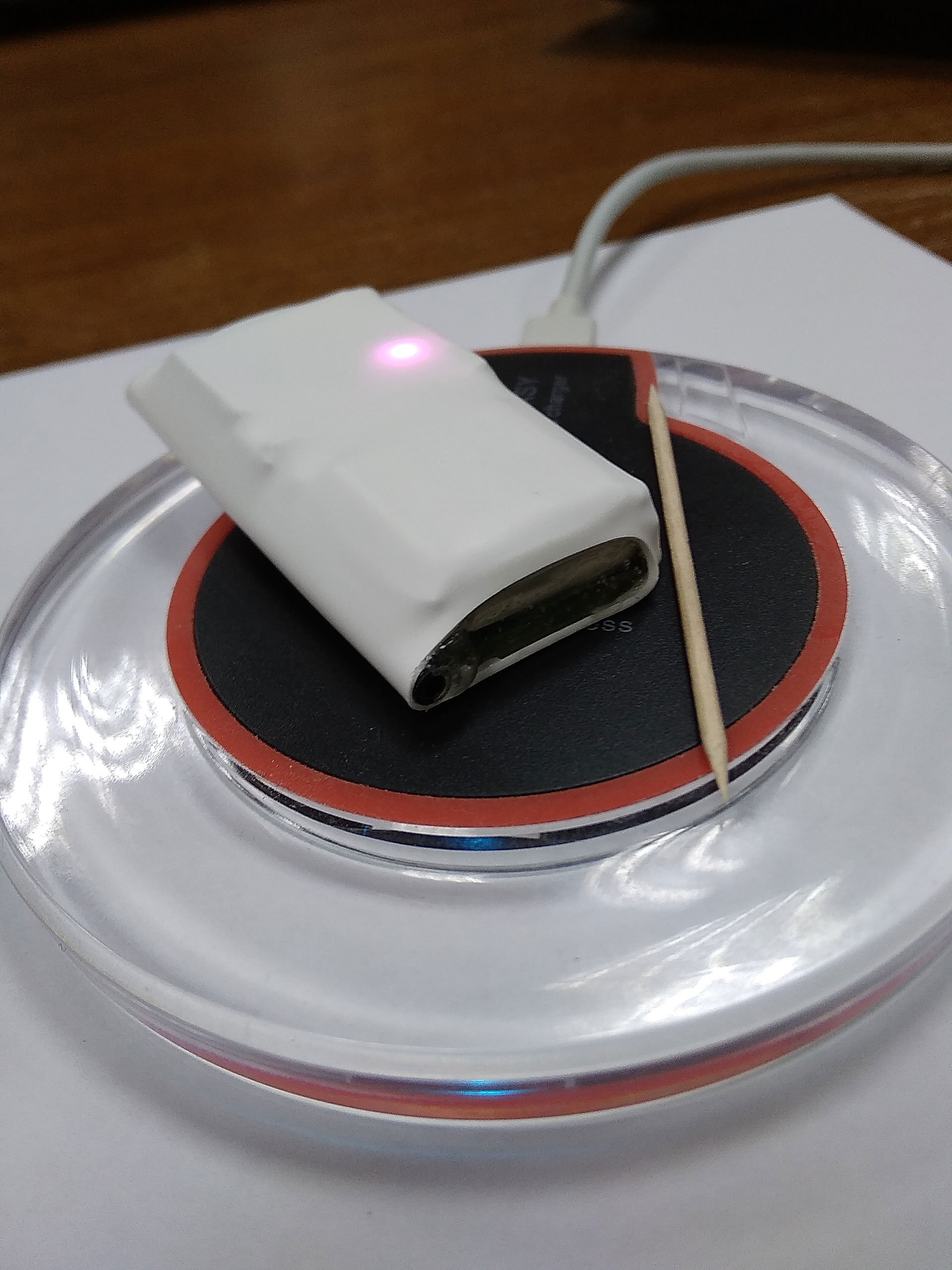
- 无线Qi充电(长达1.5小时)
- 防护等级IP68;
- 外形尺寸60 x 30 x 11毫米;
- 重量22克
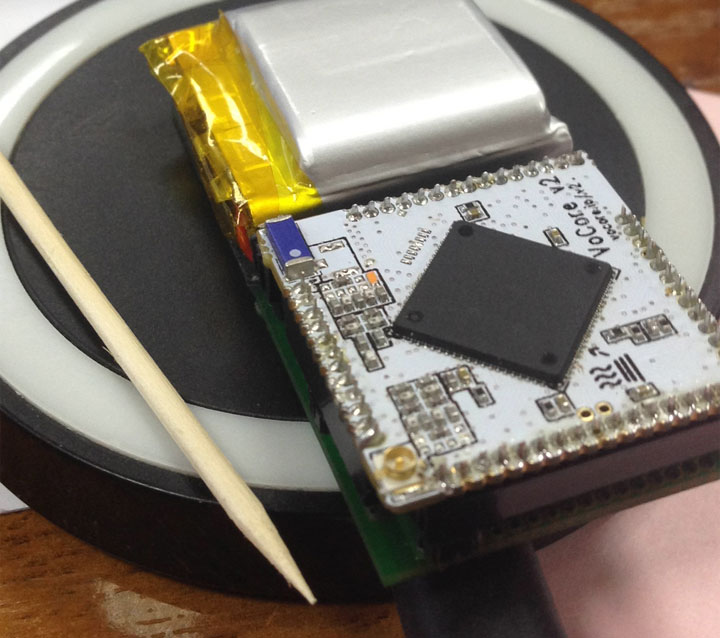
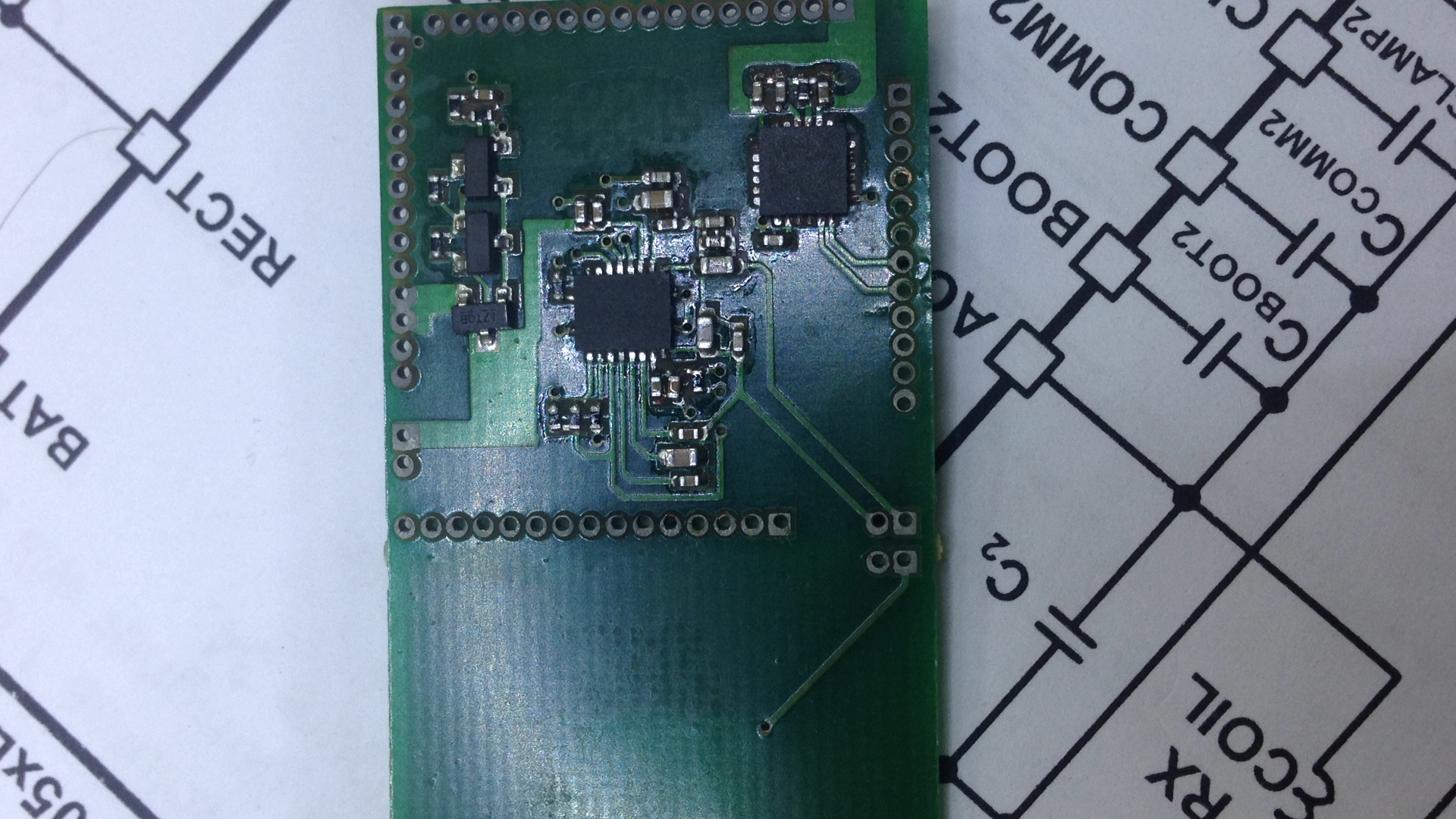
该设备在结构上是一块板上,接收器天线和Qi充电驱动器
BQ51050BRHLT ,加速度计
MPU6050 ,
Vocore2连接器和电池位于其上。 由于可热收缩的管子具有防尘和防水的功能,因此在管子的末端填充了Rexant PK-68有机硅化合物。 将钓鱼线穿过内径为2 mm的塑料管。
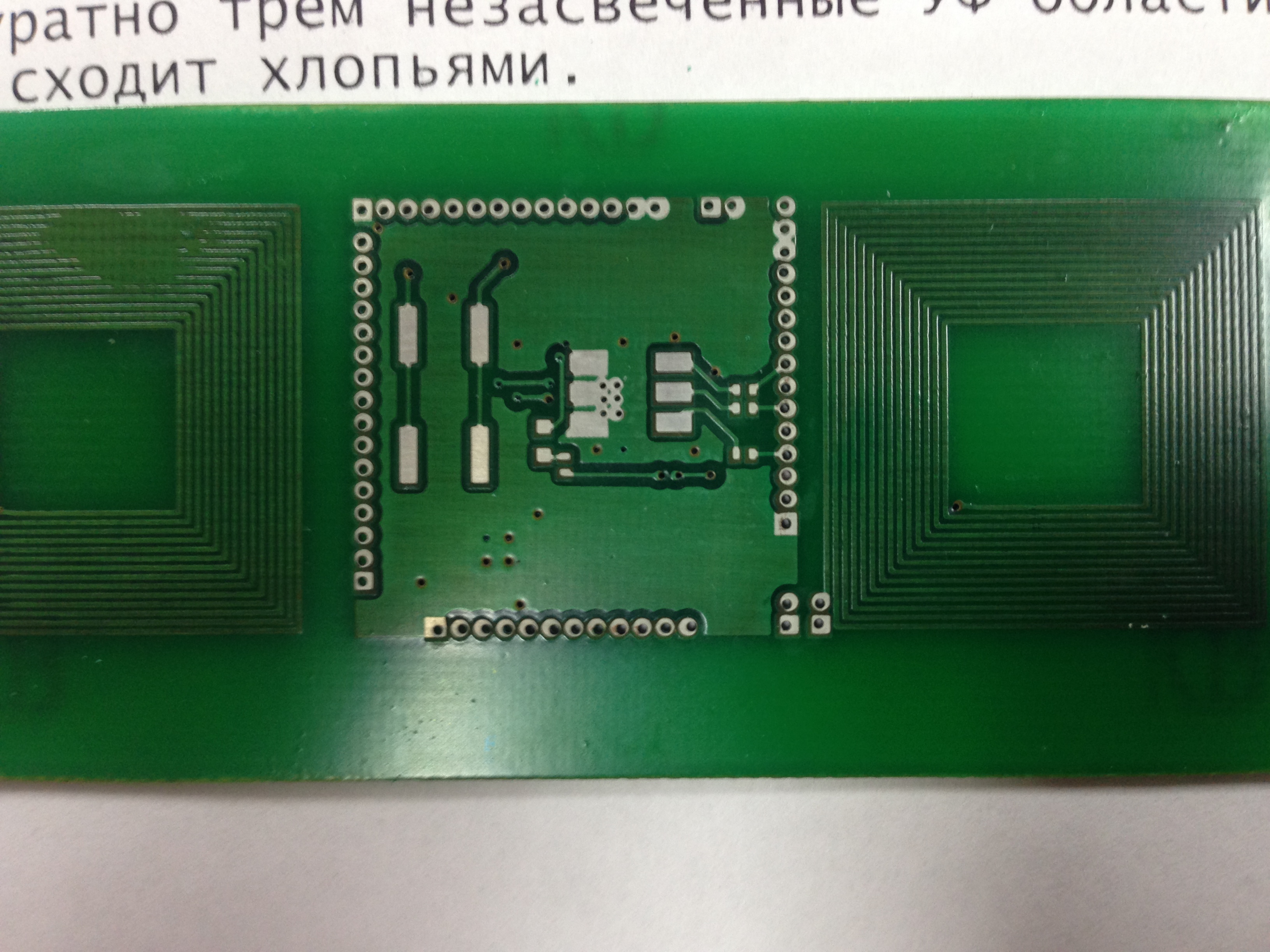
PCB制造
严峻的问题是,是否有可能制造尺寸为25 x 25 mm,14匝,走线厚度为0.3 mm,间隙为0.2 mm的Qi接收器电感线圈,以及线圈的实际电感是多少。 确认所计算的数据,并得出4μH的电感。


焊接元件
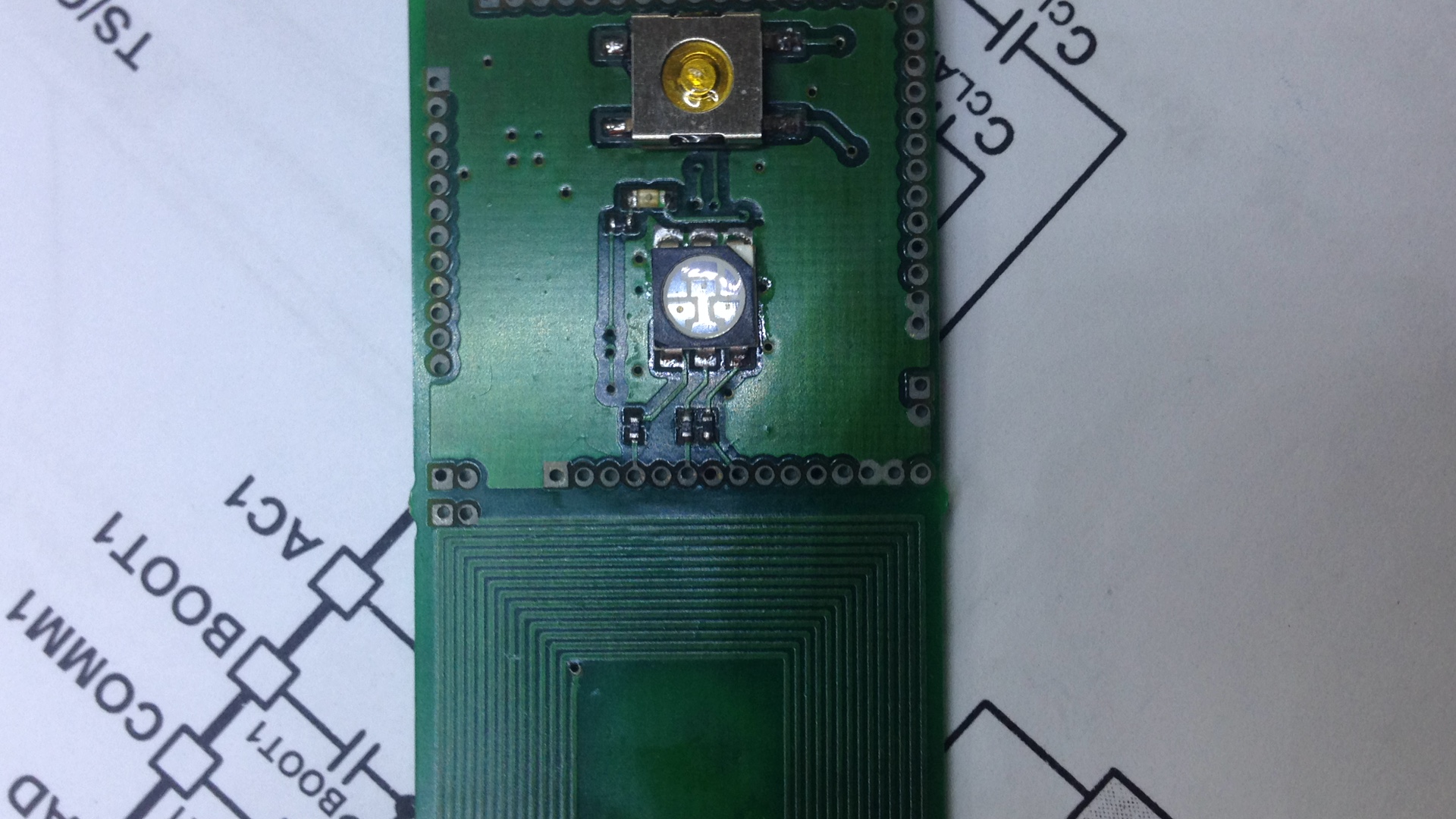
齐充设置
有趣的一点是振荡电路谐振的调整。 确认了
BQ51050BRHLT数据表的建议和计算公式。 电感为4 µH,带铁氧体屏蔽的电感为7 µH,并联电容器为6.5 nF,与线圈422 nf串联。 由于1.7欧姆的大线圈电阻,该电路的品质因数非常低(22)(数据表建议该品质因数超过500)。 尽管如此,一切都工作得很好,与发射线圈的距离为10 mm,谐振稳定。

建设性的错误计算-充电指示器位于天线的侧面,即 当FishSensor位于充电器的发射器上时,它不可见。 但是充电过程在Qi变送器本身的指示器上可见。
加速度计设置
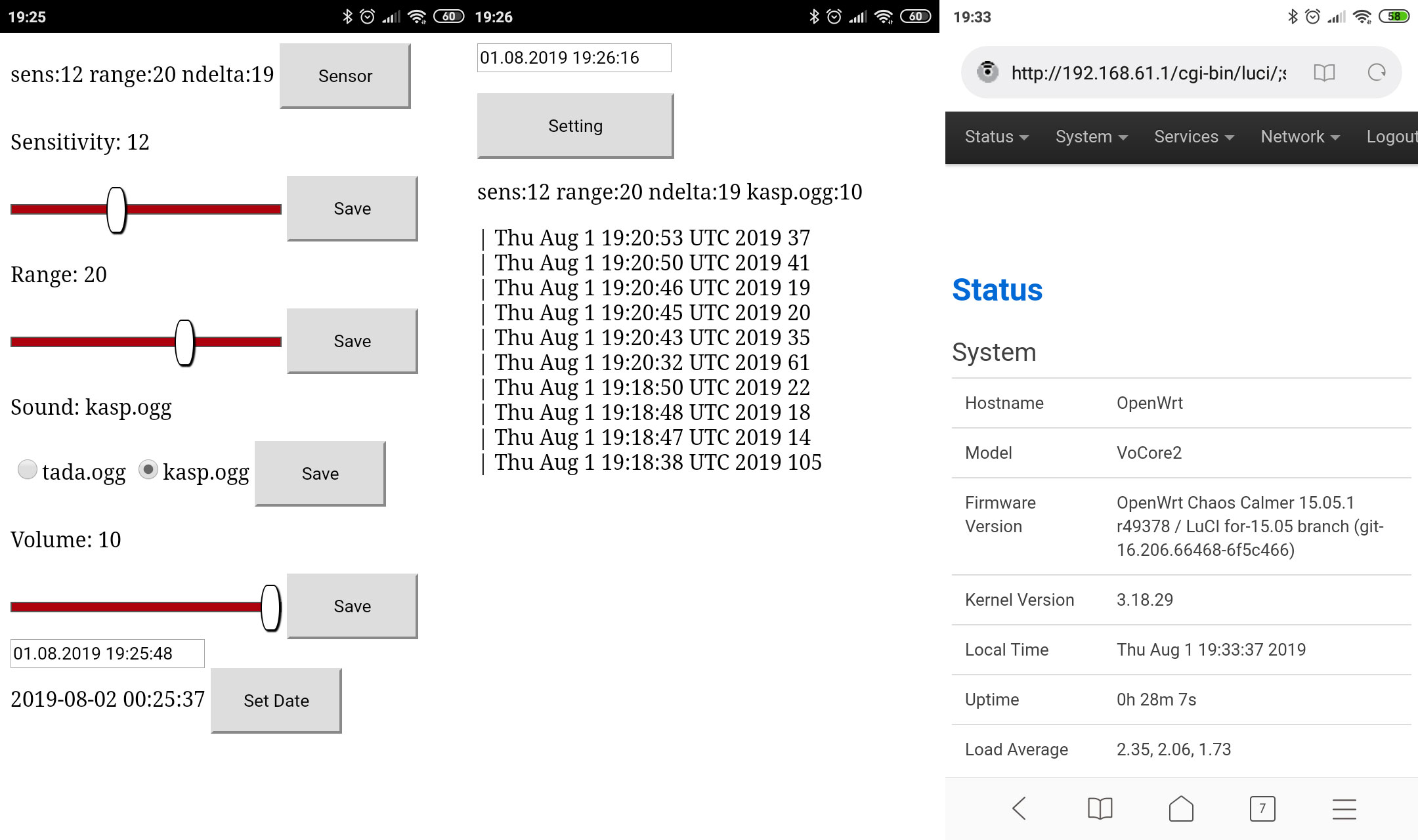
软体类
出厂安装的OC OpenWrt 05/15/1“ Chaos Calmer”板载Vocore2。 借助预先安装的Luci,可以通过浏览器通过WiFi访问该设备。 我们使用AP接入点模式。
安装了
php5软件包和所有必需的库以形成Web界面。 从
leon0516安装了
MPU6050的软件包。 启动时,我将MPU6050驱动程序的
自动运行文件和脚本写入6050.sh
bash上 。 MPU6050驱动程序生成加速度计读数/tmp/mpu6050.txt的文本文件。 6050.sh仅分析文件/tmp/mpu6050.txt中Z轴的变化,并将其日志写入/www/mess.log。
设置和显示页面用php编写。
我们将智能手机作为接入点连接到FishSensor。 从浏览器作为Web应用程序安装在桌面上。 对于Android,在浏览器设置中,我们启用了音频文件的自动播放功能(在iO中,安全策略禁止这种伪装)。
面临由OpenWrt操作系统缓存写入文本文件的数据的问题。 当内存缓存已满时,加速度计的读数将被写入文件,有时延迟可能会长达1秒。 用于关闭文件缓存的现有修补程序已损坏。 我认为这对我的任务不是很重要,因此决定将问题留给更好的时机。
演示版
尚未进行全面测试,计划于本月进行。
PS这个想法的发展可能是安装了Vocore的无绳螺丝刀,以便在咬人时钩住齿轮。 在最大的发展中,Yandex.Fishing服务。