为了使机器人捕获更可靠,研究人员正在开发尽可能复杂的对象。
 受竞争影像概念的启发,加州大学伯克利分校的研究人员研究了精心设计的物理竞争物体,这些物体很难用标准的机器人握把捕获。
受竞争影像概念的启发,加州大学伯克利分校的研究人员研究了精心设计的物理竞争物体,这些物体很难用标准的机器人握把捕获。最近,关于“竞争性图像”的话题已经出现了大量研究,这些图像是经过修改的对象的图像,因此计算机视觉算法尤其难以识别它们。 想法是使用这些图像来开发更强大的计算机视觉算法,因为它们的“对抗”性质是一种特殊实现的“最坏情况”选项-如果您的算法可以处理对抗图像,那么它可能会处理大多数其他任务。
由加州大学伯克利分校自动化与工程实验室(
AUTOLAB )的研究人员在肯·高德伯格(Ken Goldberg)教授的带领下将这一概念扩展到了机械手。 他们专门设计了物理竞赛对象,因此很难用传统的机械臂将其举起。 只需稍微校正通常的三维图形,标准的两指握把就会遇到各种困难,试图正确地抓住物体。
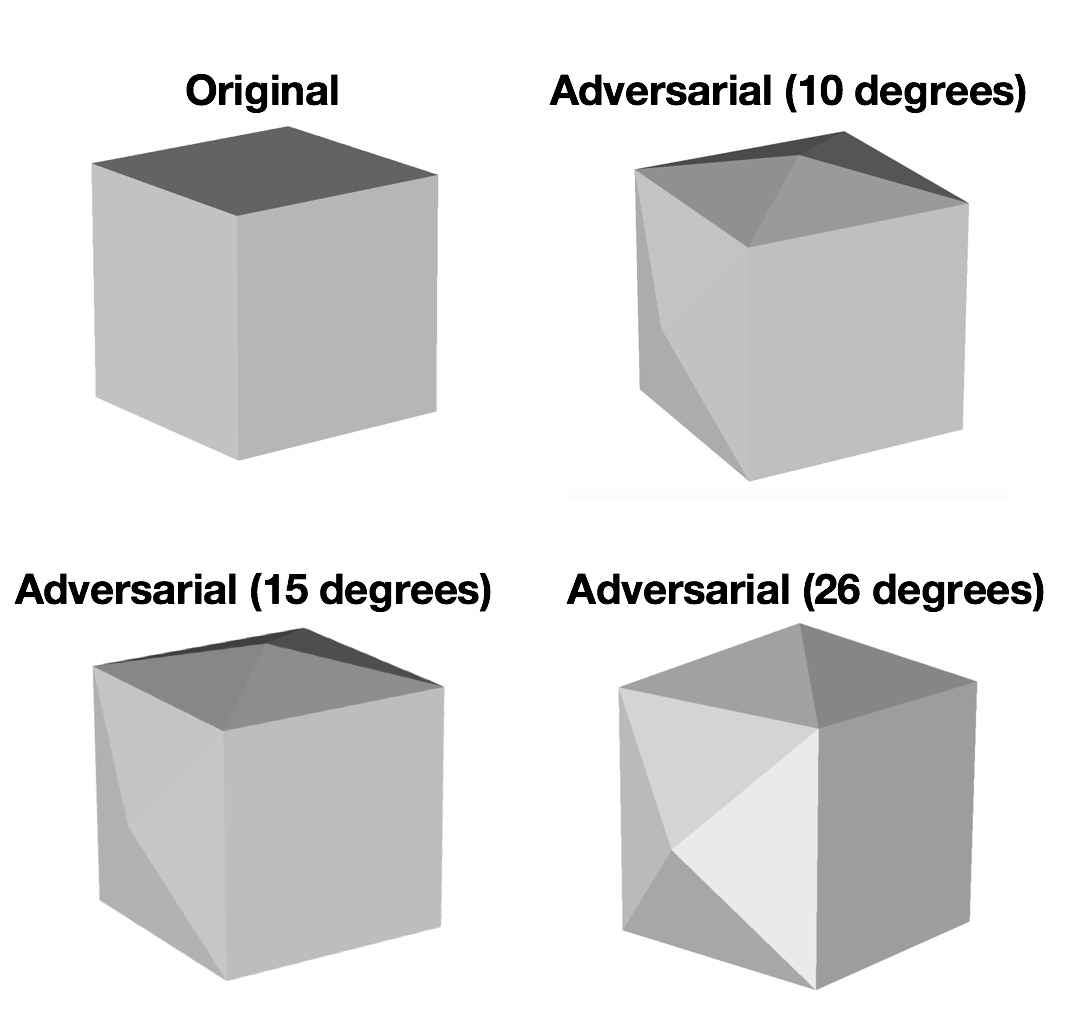 从一个立方体开始,一个竞争性物体开始进化,用两指夹抓取它变得越来越困难-当它试图挤压一个有角的表面时,该物体旋转并滑出。
从一个立方体开始,一个竞争性物体开始进化,用两指夹抓取它变得越来越困难-当它试图挤压一个有角的表面时,该物体旋转并滑出。这些竞争性物品的主要特征是它们看起来好像很容易抓住,但是至少要用两根手指的夹子才是困难的。 对象的外观与其实际几何形状之间的差异微不足道:在一个示例中,它是一个立方体,在六个侧面中的三个侧面上具有低金字塔形-最小的边角为10度。 在每个金字塔的对面都有一个普通的平面,因此,立方体没有相对的平面。 因此,在对象的夹具上工作的两指夹具会遇到问题,因为如果尝试以一定角度夹持表面,压缩力将导致对象旋转,并且通常会掉出夹具。
 点接触的并行捕获成功捕获了一个常规立方体(左),并且无法应对研究人员开发的竞争性立方体(右)
点接触的并行捕获成功捕获了一个常规立方体(左),并且无法应对研究人员开发的竞争性立方体(右)捕获计划人员通常会寻找可夹持的相对的光滑表面,并且由于竞争性立方体与常规立方体之间的差异很小,足以使3D传感器无法错过,因此大多数机器人系统会认为:“哦,这是一个立方体,非常容易! 然后,当多维数据集脱出并滑出其抓地力时,他们肯定会使任务失败。
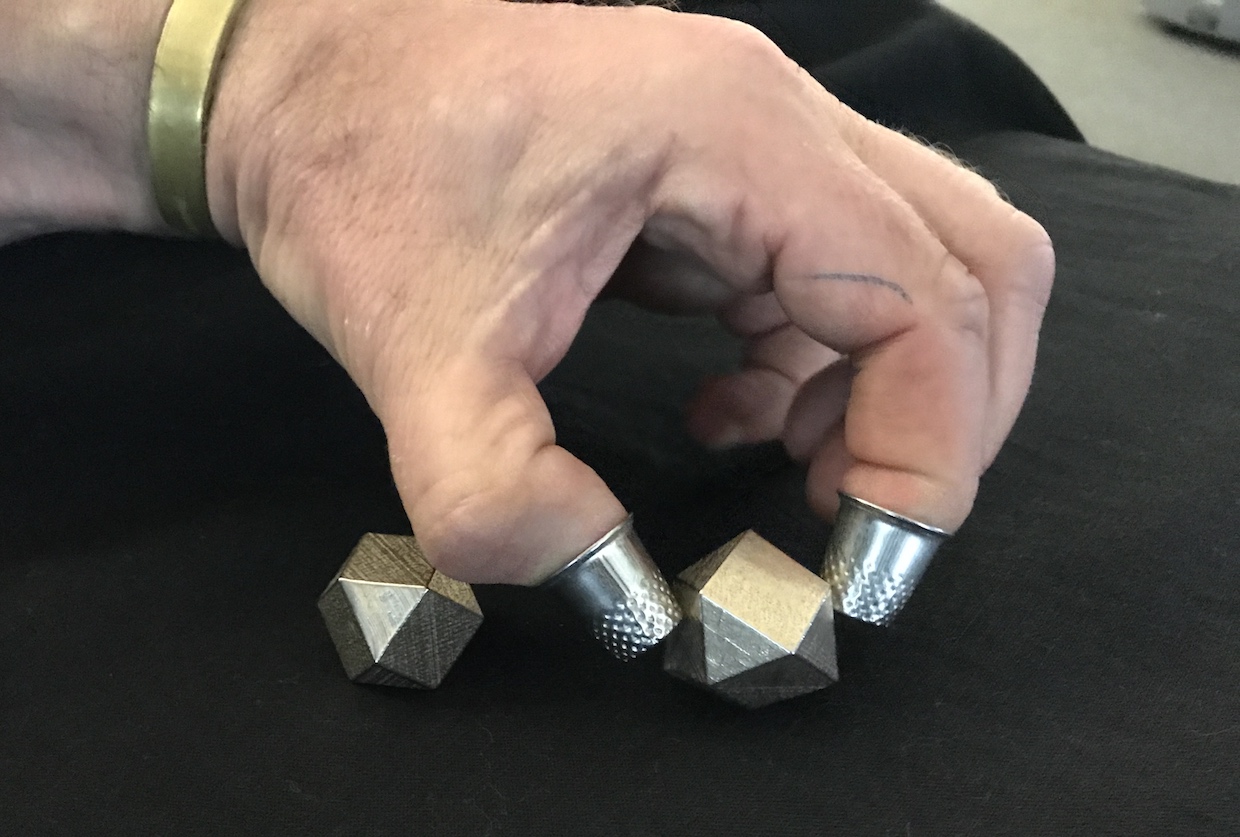 对抗形式也适用于人类-戴上顶针模仿机器人寒冷,不敏感的钢铁,并用两根手指夹住物体,研究人员证实很难举起这些物体
对抗形式也适用于人类-戴上顶针模仿机器人寒冷,不敏感的钢铁,并用两根手指夹住物体,研究人员证实很难举起这些物体随着表格的复杂性增加,开发具有竞争力的版本变得越来越困难。 研究人员采用立方八面体(具有八个三角形和六个正方形面的多面体),随机更改了图形的顶点(在模拟中),直到得到的形状没有直接相对的面。 对于更复杂的形式,例如相交的圆柱体,使用深度学习算法获得了竞争示例。
 对于更复杂的形式,例如相交的圆柱体,使用深度学习算法获得了竞争示例
对于更复杂的形式,例如相交的圆柱体,使用深度学习算法获得了竞争示例在现实世界中的
初步测试中,平行点捕获试图举起其中一些有争议的物体。 在每种情况下,捕获对象的估计概率均为100%(基于模拟中测试的
Dex-Net策略),但实际上,事实证明,成功捕获竞争性立方体和立方八面体的成功率仅为13%。
研究人员说,他们计划使用各种类型的握把以及真空握把来测试这些物体,以查看它们是否可以制造出最具竞争力的物体。 请记住,所有这一切的目的不仅在于愚弄不幸的捕获算法,还在于开发工具,以帮助使机器人捕获在现实世界中充分(希望)可靠地工作。