我想谈谈我的机电大理石机的第二版及其设计过程。 关于
我已经在轮毂上写过的第一辆螺旋车 从那时起,已经过了很长时间,现在,原则上已经实施了该计划:两个升降机和两个下降装置作为一个系统一起工作,通过将球以任意顺序混合在一起而相互转移。 老实说,我不喜欢这里的所有内容,有些东西需要重做或进行更精细的调整,但我很高兴总的来说我做到了。 视频上的结果!
我是一名程序员。 进行编程时,通常会花一周的时间编写和调试代码,但是,然后重新思考一下,只需删除一周内因过度工作而创建的所有内容,然后在两个小时内再次进行清理,工作和梳理即可。 在开发大理石机时,我遇到了一个事实,即在物理世界中,该原理不起作用。 它要么起作用,但功能很弱……或者我还不知道如何使它以这种方式起作用。
有很多问题。
第一个问题可能是我作为大理石机械设计师的资格不够高。 我认为这是暂时的缺点,也许我仍然可以提高自己的技能。 我使用了KOMPAS-3D设计环境。 实际上,掌握此工具并不容易。 也许现在我可以使用COMPASS的2-3%的功能。 我必须重新阅读一堆说明,并在YouTube上修改一堆演示视频。 目前,我已经学会了设计单个零件的方法,但是我仍然不知道如何在3D模型中将它们组合为单一设计,以确保旋转零件正确交互,不要在不必要的情况下彼此紧贴,以确保它们的运动足够。 然后,我真的无法想象在现代3D编辑器中是否可以模拟自由零件的运动,例如,球在倾斜平面上的运动,对球下落的位置进行建模等等。 总的来说,我需要学习一些东西。
我可以举一个这样的例子来说明我的自学指南针。 即使在设计第一台螺旋大理石机时,我也遇到了一个问题,就是我不知道如何以微小的角度制作多个平面。 设计主平面正交的零件很容易。 但是,如果我需要一条下降的蛇怎么办? 然后我想出了这个奇怪的把戏(没有什么比这更好的了)。

我在飞机上绘制了下降轮廓,然后将其挤出:
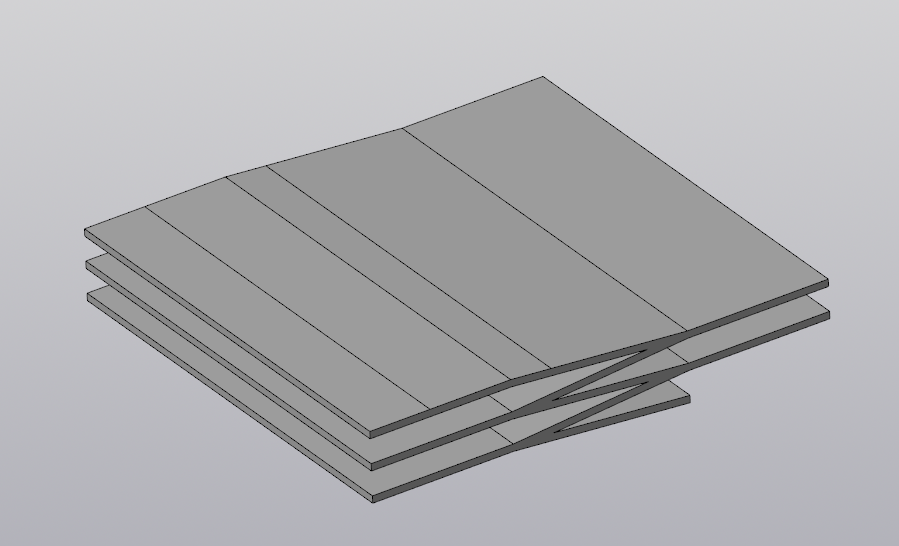
然后他通过从上方投影草图来剪掉所有多余的东西:
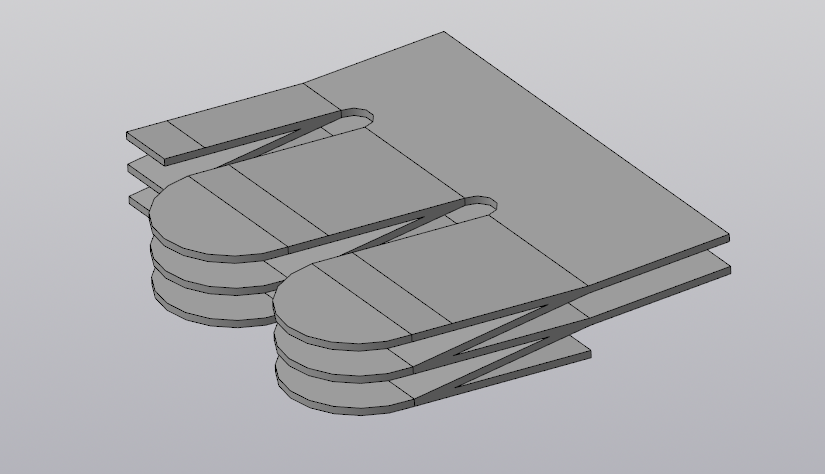
现在,我已经知道使用这种技术有多么困难和愚蠢。 使用偏移罗盘平面会容易得多,但后来我做不到...现在,我本来可以简化这样的细节。
第二个问题与第一个问题部分相关-它是打印时间。 具有分层打印的3D打印机需要相当长的时间。 事实证明,如果我还不知道如何在软件中建模零件的交互作用,那么要检查节点的可操作性,您需要花费大量时间和精力。 我碰巧设计了两个部分,然后打印,但是它们不能很好地配合在一起,因此我需要更改模型中的某些内容。 这又是浪费时间和精力。 但是塑料根本不贵,不是那么可惜,而是时间...是的,很可惜。
第三个问题是缺乏经验。 我犯的许多错误都来自天真和经验不足。 当您将所有球的位置算作一个单独的状态时,Marble Machine是一种具有无数状态的机器人机器。 该机器具有许多移动的机械零件。 在设计起重机时,我希望能够通过垫圈上的螺钉/螺柱和螺母将移动的塑料零件通过其上的孔连接。 但是事实证明这是行不通的。 打印后在塑料零件上设计的孔太小,太大或在操作过程中很快变松。 即使穿过垫圈,螺母也始终会松动。 带尼龙环的自锁螺母可以改善这种情况,但是这种弹跳仍然不可接受。 不要拧紧螺母-它会挂住并拧紧-会有很大的摩擦,电动机不会拉扯。 我对自己进行了所有测试,直到我意识到需要尽可能正确地完成的工作,即:将轴承放置在运动部件上的任何地方。 这种简单的解决方案消除了反向间隙和出色的移动性,最小的摩擦力,并且没有任何自发拧松的现象。 我必须重做许多模型才能使用轴承。 例如,以下是步进电机的两个连杆零件的模型:
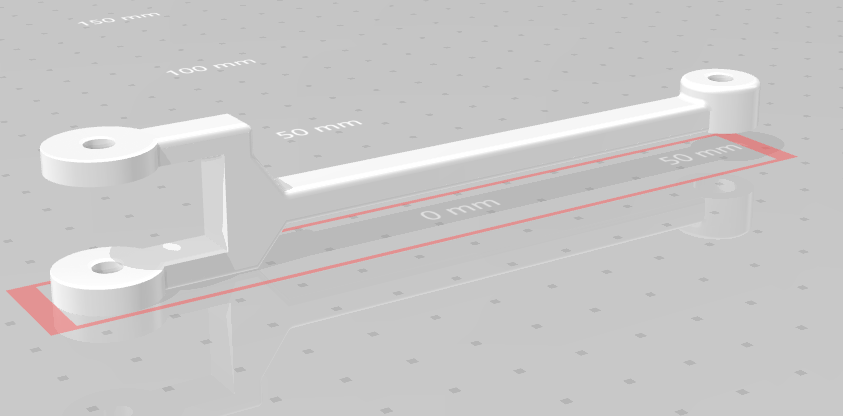
在这里:

现在,它们通过轴承连接。 我在轴承座上设计了一个凹槽,以便可以将轴承紧密地插入到过盈配合中,甚至可以用螺钉将其拧紧。
这些照片显示了轴承现在所在的位置:

以及更多:

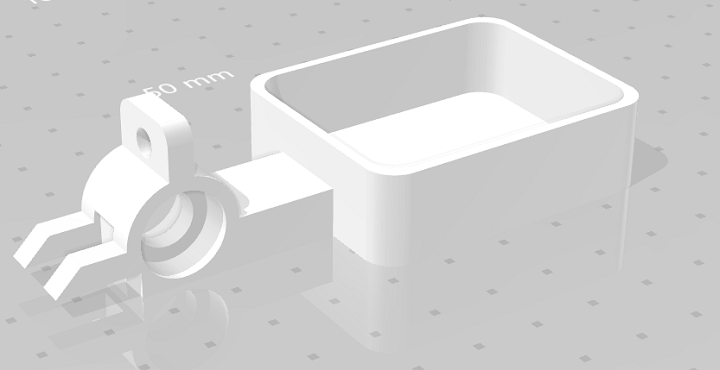
然后,下一个问题是结构的刚性。 如您所见,我正在尝试创建一种机械机器人艺术品,并且白色,黑色和有光泽的金属组合并非偶然。 在吊杆中,我想放一个金属螺柱M4。 她必须赋予酒吧必要的力量,并且应该“在聚光灯的照耀下”发光(如果有的话)。 但是,它没有解决。 使用金属螺栓时,杆的重量和惯性会大大增加。 我差劲的步进电机几乎没有拉高这样的杆,但她几乎摔倒了。 我在这里必须采取极端的措施:我在打印机上打印了一个直径为4毫米的塑料白色销钉(白色PLA),只需将其粘贴在杆内即可放置金属销钉的位置。 结果很好。 不是很坚固,但结构很轻。 后来我想到的第二个想法-起重机应该带有配重! 我为什么不立即考虑呢? 这里的问题是:重做模型并重新键入整个条形,还是在现有条形上打印少量内容,然后“使用文件”? 我选择了第二个,速度更快-我制作了一个单独的零件,该零件将包含一个轴承位置和一个在负载下的盒子-一个配重:
我从杆上剪下尾巴,然后用二氯乙烷将新零件粘在旧零件上。

照片在这里显示了粘合的位置。 虽然...此处并非一目了然,但是如何平衡水龙头? 当他丢球时,他的体重可变。我必须说,我仍然低估了金属球本身的重量。 尽管它们不大,但为12.5毫米,但每个重8克,但作用在宽阔的肩膀上。 当起重机一次提起三个球,然后将它们扔到较高位置时,杆上会发生弹性振动。 我将如何预先考虑它们? 我无法想象 是否可以通过COMPASS或其他CAD进行计算?
总的来说,在开发这款大理石机时,我遇到了一个事实,就是很多事情都没有我想象的那样。 例如,最简单的是用于收集球的漏斗。 在这里,我对此部分进行了3D渲染:

看来这里可能出什么问题了? 但是实际上,即使这个渠道也不一样,我的想法也不一样! 我将球底部做成球体表面的一部分,并认为球会沿着这样的碗滚动,并且当它们向下移动到出口时它们的速度会增加。 但是不! 事实证明,球滚动并且下坡时地面的陡度较小,随着接近出口,球的速度变慢。 也许0.2毫米台阶的作用是打印层的厚度? 有些东西与我想要的或想法不完全相同。 但是至少他没有改造这个地方。
另一个重要的问题是如何将两台大理石机器对接在一起? 我已经有一个螺旋机并且可以工作,可以原样保留吗? 为了就第一台螺旋机的滚珠流水平达成一致,我必须将其完全拆开,在COMPASS中进行设计,并打印螺旋机架的支架,使其更高并重新组装机器。 然后有必要提出一个流量开关,一个扳机,一个在扳机下方的陷阱,跟踪和转向。 通常,创建过程非常有趣。 我有一个朋友,他的妻子是一位艺术家,我记得很长一段时间都在画鱼。 我来拜访他们,我看,这样的正常鱼。 一个星期后,我来了-同一幅画中的鱼已经朝着另一个方向游泳。 所以我也有类似的东西。 今天我想出并做到了,但是明天我重新考虑并重新设计了所有东西,打印了另一个模型,安装了它,然后进行了测试。
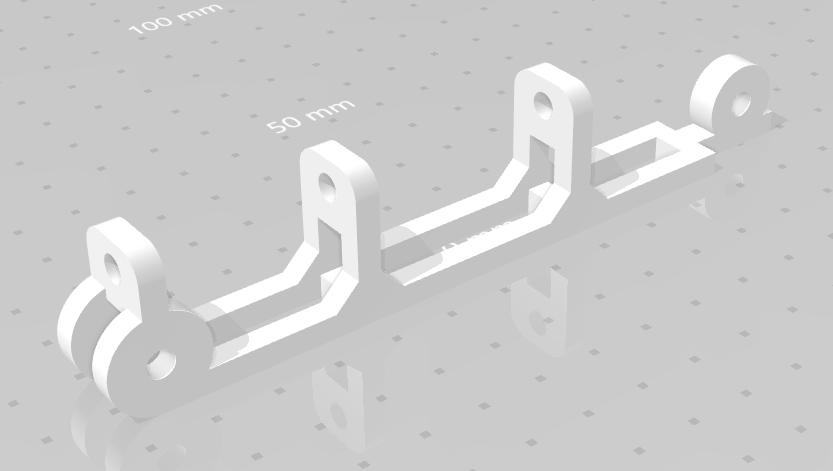
接下来,我将告诉您设计其他哪些细节。 以下是这些模型的3D渲染。 吊架:

在机架上,在引擎驱动器卡的下方提供着陆开口。
我将第二部分连接到起重机支架:步进电机支架:
还有一个无法预料的问题-支架太耐用且太厚。 现在,发动机出现了冷却问题。 您可能必须重新设计该站点。
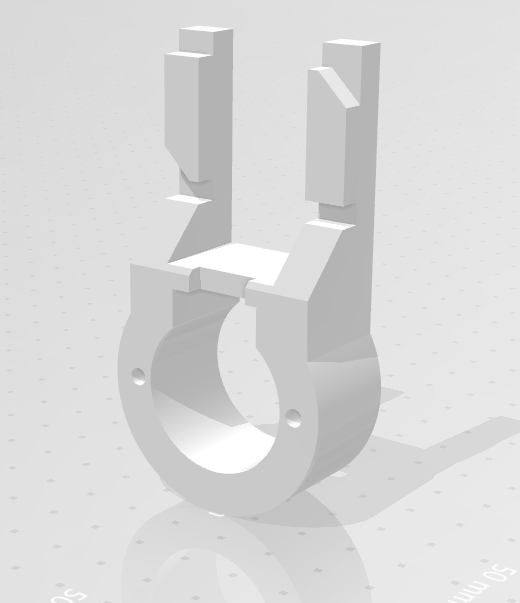
在上方的机架上,“三角形”部分用带有轴承座的螺钉固定,用于支撑吊杆:

吊杆的两个部分:
在这里:

触发触发器是最重要的部分之一:
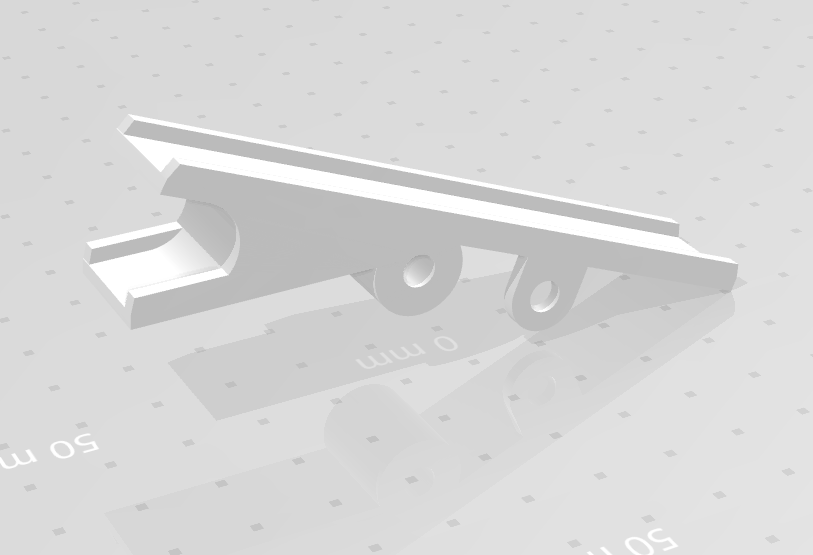
还有一个碗用来从扳机上接球:

还有许多其他次要细节,必须随时随地发明,设计和打印一种或另一种方式。
实话实说,在组装完所有机械之后,当我切换到项目的电气和软件部分时,我什至松了一口气,就在那里,一切都很简单!

要对Mars Rover 3bis的FPGA板进行编程,启动两个步进电机,连接起重螺线管并组织簧片开关的轮询,在我看来,这比Marble Machine机器人的结构设计和实现要简单得多。 但是FPGA编程又是另外一回事了,如果有人感兴趣,可以
在这里阅读 。
现在,我已经在考虑为下一版本的Marble Machine v3设计以下类型的升降机。 这里有选项:阿基米德螺丝,步进葫芦,齿轮。 有一些事情需要考虑,有一些事情要砸他的头。