你好
在这里,我们描述某个领域的工作,然后做出一些漂亮的功能(这里的一切都很简单)。
本文将发生什么。
一般情况:
- 我们描述了基础,即使用向量(对于手头没有麻木的人使用的自行车)
- 我们描述了相互作用的实质点和领域
特殊情况(基于一般情况):
- 让我们可视化电磁场强度的矢量场(第一张和第三张图片)
- 我们将可视化粒子在电磁场中的运动
切面下见我!
理论背景编程
向量
所有基础的基础都是一个向量(尤其是在我们的案例中)。 因此,我们将从向量的描述开始。 我们需要什么? 向量,距离,模块和一些技术问题上的算术运算。 我们将从列表继承的向量。 这是其初始化的样子:
class Vector(list): def __init__(self, *el): for e in el: self.append(e)
也就是说,现在我们可以创建一个向量
v = Vector(1, 2, 3)
让我们设置算术运算加法:
class Vector(list): ... def __add__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] + other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self + other
好:
v1 = Vector(1, 2, 3) v2 = Vector(2, 57, 23.2) v1 + v2 >>> [3, 59, 26.2]
我们类似地定义所有算术运算(向量的完整代码将更低)。 现在您需要距离功能。 我可以制作一个粗糙的dist(v1,v2)-但这并不漂亮,因此请重新定义%运算符:
class Vector(list): ... def __mod__(self, other): return sum((self - other) ** 2) ** 0.5
好:
v1 = Vector(1, 2, 3) v2 = Vector(2, 57, 23.2) v1 % v2 >>> 58.60068258988115
我们还需要两种方法来更快地生成矢量和实现漂亮的输出。 这里没有棘手的问题,因此这里是Vector类的完整代码:
所有向量类代码 class Vector(list): def __init__(self, *el): for e in el: self.append(e) def __add__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] + other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self + other def __sub__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] - other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self - other def __mul__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] * other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self * other def __truediv__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] / other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self / other def __pow__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] ** other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self ** other def __mod__(self, other): return sum((self - other) ** 2) ** 0.5 def mod(self): return self % Vector.emptyvec(len(self)) def dim(self): return len(self) def __str__(self): if len(self) == 0: return "Empty" r = [str(i) for i in self] return "< " + " ".join(r) + " >" def _ipython_display_(self): print(str(self)) @staticmethod def emptyvec(lens=2, n=0): return Vector(*[n for i in range(lens)]) @staticmethod def randvec(dim): return Vector(*[random.random() for i in range(dim)])
物质点
理论上,这里的一切都很简单-该点具有坐标,速度和加速度(为简单起见)。 此外,她还有一个质量和一组自定义参数(例如,对于电磁场,电荷不会伤害我们,但没有人打扰您设置至少一个自旋)。
初始化如下:
class Point: def __init__(self, coords, mass=1.0, q=1.0 speed=None, **properties): self.coords = coords if speed is None: self.speed = Vector(*[0 for i in range(len(coords))]) else: self.speed = speed self.acc = Vector(*[0 for i in range(len(coords))]) self.mass = mass self.__params__ = ["coords", "speed", "acc", "q"] + list(properties.keys()) self.q = q for prop in properties: setattr(self, prop, properties[prop])
为了移动,固定和加速我们的观点,我们将编写以下方法:
class Point: ... def move(self, dt): self.coords = self.coords + self.speed * dt def accelerate(self, dt): self.speed = self.speed + self.acc * dt def accinc(self, force):
做得好,观点本身就做好了。
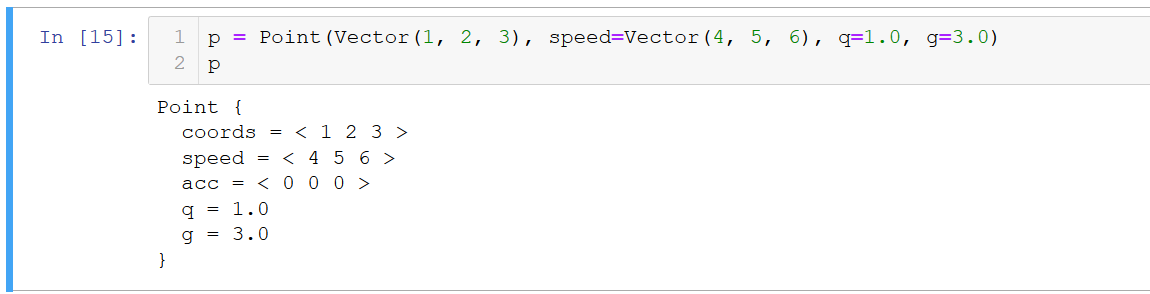
点代码(输出效果不错) class Point: def __init__(self, coords, mass=1.0, q=1.0 speed=None, **properties): self.coords = coords if speed is None: self.speed = Vector(*[0 for i in range(len(coords))]) else: self.speed = speed self.acc = Vector(*[0 for i in range(len(coords))]) self.mass = mass self.__params__ = ["coords", "speed", "acc", "q"] + list(properties.keys()) self.q = q for prop in properties: setattr(self, prop, properties[prop]) def move(self, dt): self.coords = self.coords + self.speed * dt def accelerate(self, dt): self.speed = self.speed + self.acc * dt def accinc(self, force): self.acc = self.acc + force / self.mass def clean_acc(self): self.acc = self.acc * 0 def __str__(self): r = ["Point {"] for p in self.__params__: r.append(" " + p + " = " + str(getattr(self, p))) r += ["}"] return "\n".join(r) def _ipython_display_(self): print(str(self))
结果:
互动领域
我们将交互场称为包含所有物质点的集合并对其施加作用力的对象。 我们将考虑我们奇妙的宇宙的特殊情况,因此我们将进行一个自定义的交互(当然,这很容易扩展)。 声明一个构造函数并添加一个点:
class InteractionField: def __init__(self, F):
现在,有趣的部分是声明一个函数,该函数将在此时返回“张力”。 尽管此概念指的是电磁相互作用,但在我们的情况下,它是一些抽象矢量,我们将沿着该矢量移动该点。 在这种情况下,我们将拥有点q的属性,在特定情况下-点的电荷(通常-我们想要的任何东西,甚至是向量)。 那么C点的张力是多少? 像这样:
也就是说,此时的张力
等于作用在某个单位点上的所有物质点的力之和。
class InteractionField: ... def intensity(self, coord): proj = Vector(*[0 for i in range(coord.dim())]) single_point = Point(Vector(), mass=1.0, q=1.0)
至此,您已经可以绘制矢量场,但我们将在最后完成。 现在让我们在互动中迈出一步
class InteractionField: ... def step(self, dt): self.clean_acc() for p in self.points: p.accinc(self.intensity(p.coords) * pq) p.accelerate(dt) p.move(dt)
这里的一切都很简单。 对于每个点,我们确定这些坐标中的张力,然后确定在ETU物料点上的最终力:
定义缺少的功能。
所有交互字段代码 class InteractionField: def __init__(self, F): self.points = [] self.F = F def move_all(self, dt): for p in self.points: p.move(dt) def intensity(self, coord): proj = Vector(*[0 for i in range(coord.dim())]) single_point = Point(Vector(), mass=1.0, q=1.0) for p in self.points: if coord % p.coords < 10 ** (-10): continue d = p.coords % coord fmod = self.F(single_point, p, d) * (-1) proj = proj + (coord - p.coords) / d * fmod return proj def step(self, dt): self.clean_acc() for p in self.points: p.accinc(self.intensity(p.coords) * pq) p.accelerate(dt) p.move(dt) def clean_acc(self): for p in self.points: p.clean_acc() def append(self, *args, **kwargs): self.points.append(Point(*args, **kwargs)) def gather_coords(self): return [p.coords for p in self.points]
特例。 粒子运动和矢量场可视化
因此,我们来到了最有趣的地方。 让我们从...开始
模拟电磁场中粒子的运动
u = InteractionField(lambda p1, p2, r: 300000 * -p1.q * p2.q / (r ** 2 + 0.1)) for i in range(3): u.append(Vector.randvec(2) * 10, q=random.random() - 0.5)
实际上,系数k应该等于某种十亿(9 * 10 ^(-9)),但是由于它将在时间t-> 0之前被淬灭,因此我立即决定使它们都足够大。 因此,在我们的物理学中,k = 300'000。 关于其他所有内容,我认为这很清楚。
r ** 2 + 0.1
-这是避免被零除的问题。我们当然可能会感到困惑,解决了一个很大的扩散系统,但是首先,对于两个以上的物体,没有运动方程,其次,“初学者的文章”概念中显然没有包含这个方程。
接下来,我们沿每个轴添加十个点(二维空间),坐标从0到10。 同样,我们给每个点从-0.25到0.25收费。 现在进行循环并根据其坐标(和轨迹)绘制点:
X, Y = [], [] for i in range(130): u.step(0.0006) xd, yd = zip(*u.gather_coords()) X.extend(xd) Y.extend(yd) plt.figure(figsize=[8, 8]) plt.scatter(X, Y) plt.scatter(*zip(*u.gather_coords()), color="orange") plt.show()
应该发生什么:
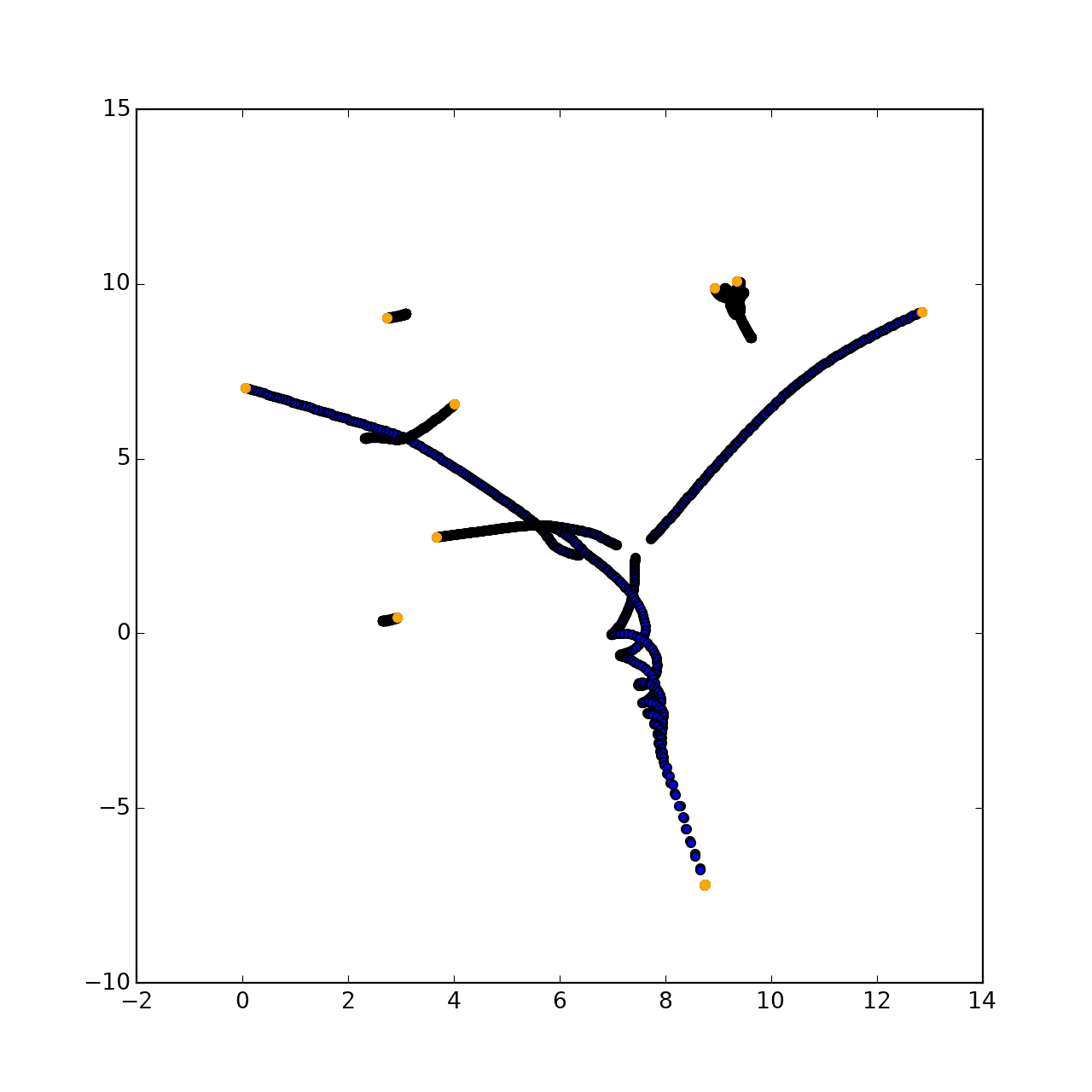
实际上,绘图是完全随机的,因为在力学发展的时刻,每个点的轨迹都是不可预测的。
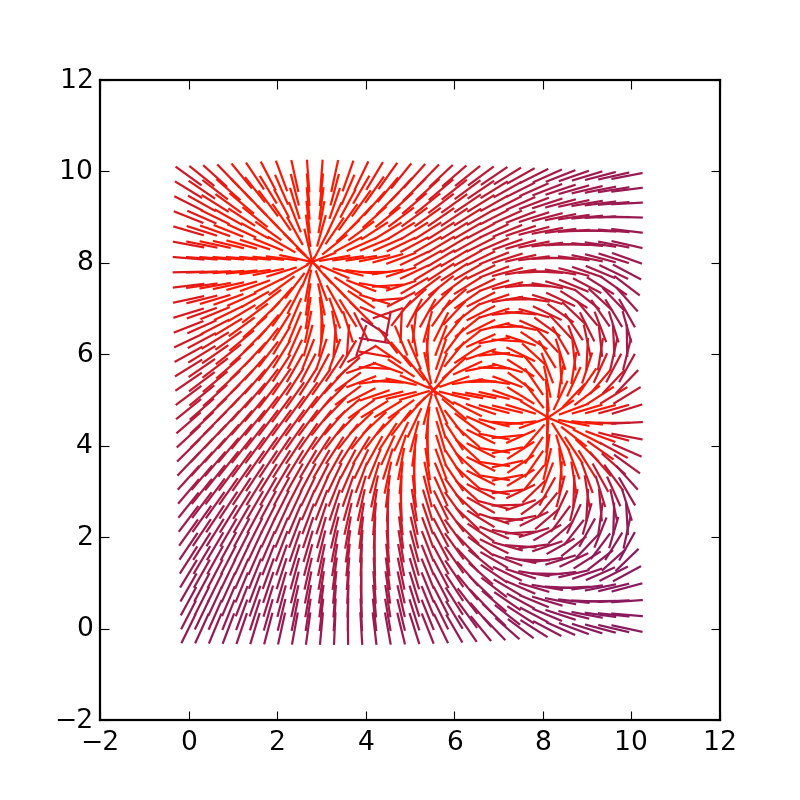
矢量场可视化
这里的一切都很简单。 我们需要经过一些步骤,并在正确的方向上在每个坐标上绘制一个向量。
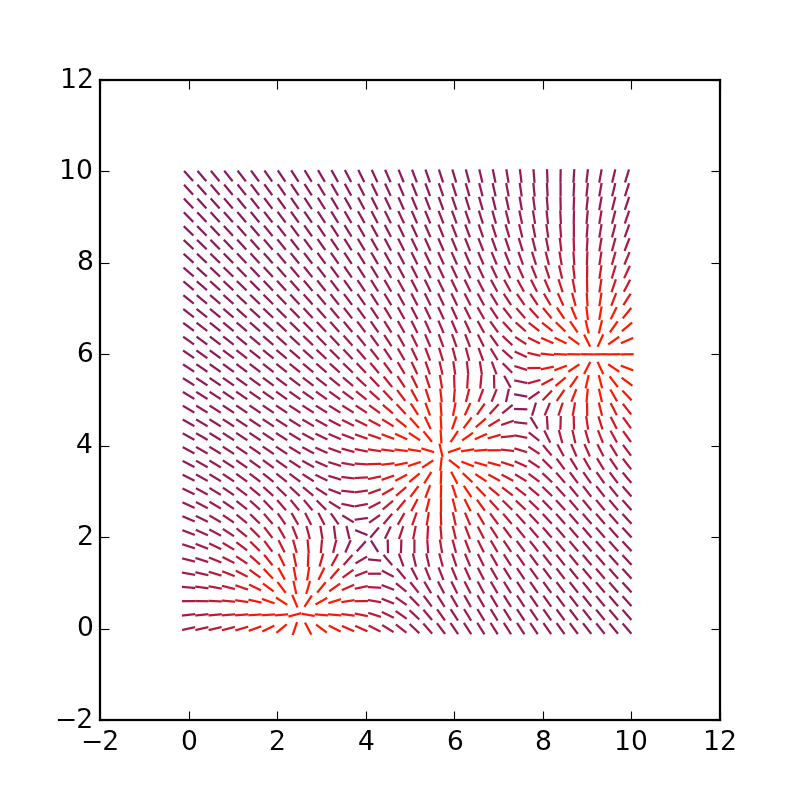
fig = plt.figure(figsize=[5, 5]) res = [] STEP = 0.3 for x in np.arange(0, 10, STEP): for y in np.arange(0, 10, STEP): inten = u.intensity(Vector(x, y)) F = inten.mod() inten /= inten.mod() * 4
大概应该得出这个结论。
您可以加长向量本身,将* 4替换为* 1.5:
我们玩的是立体感和造型
创建一个具有200个点的5维空间,并且该交互不取决于距离的平方,而取决于4度。
u = InteractionField(lambda p1, p2, r: 300000 * -p1.q * p2.q / (r ** 4 + 0.1)) for i in range(200): u.append(Vector.randvec(5) * 10, q=random.random() - 0.5)
现在,所有坐标,速度等都定义为五个维度。 现在让我们建模:
velmod = 0 velocities = [] for i in range(100): u.step(0.0005) velmod = sum([p.speed.mod() for p in u.points])
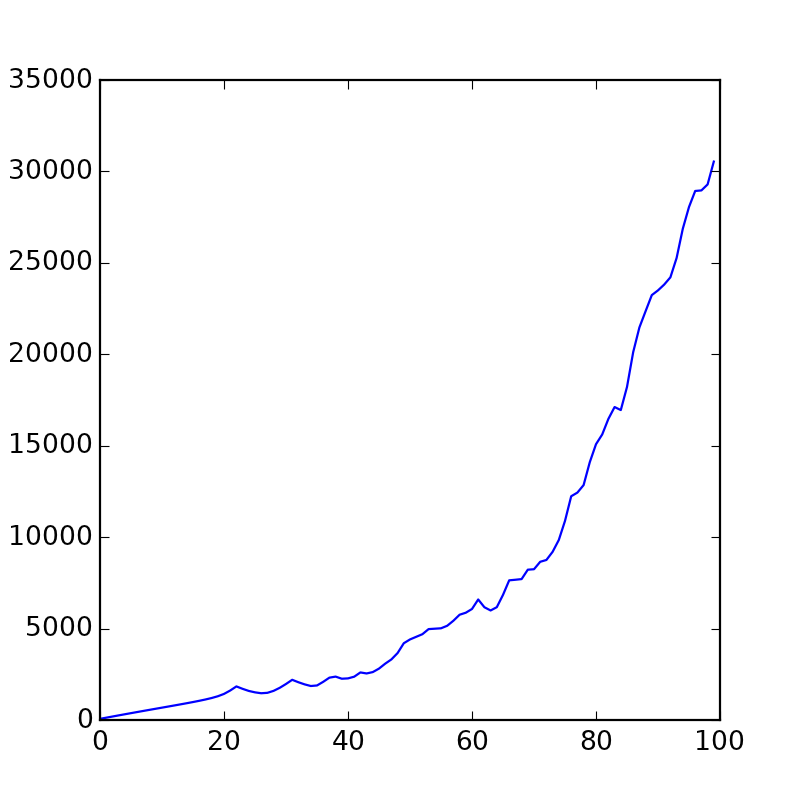
这是在任何给定时间所有速度总和的图表。 如您所见,随着时间的推移,它们正在缓慢加速。
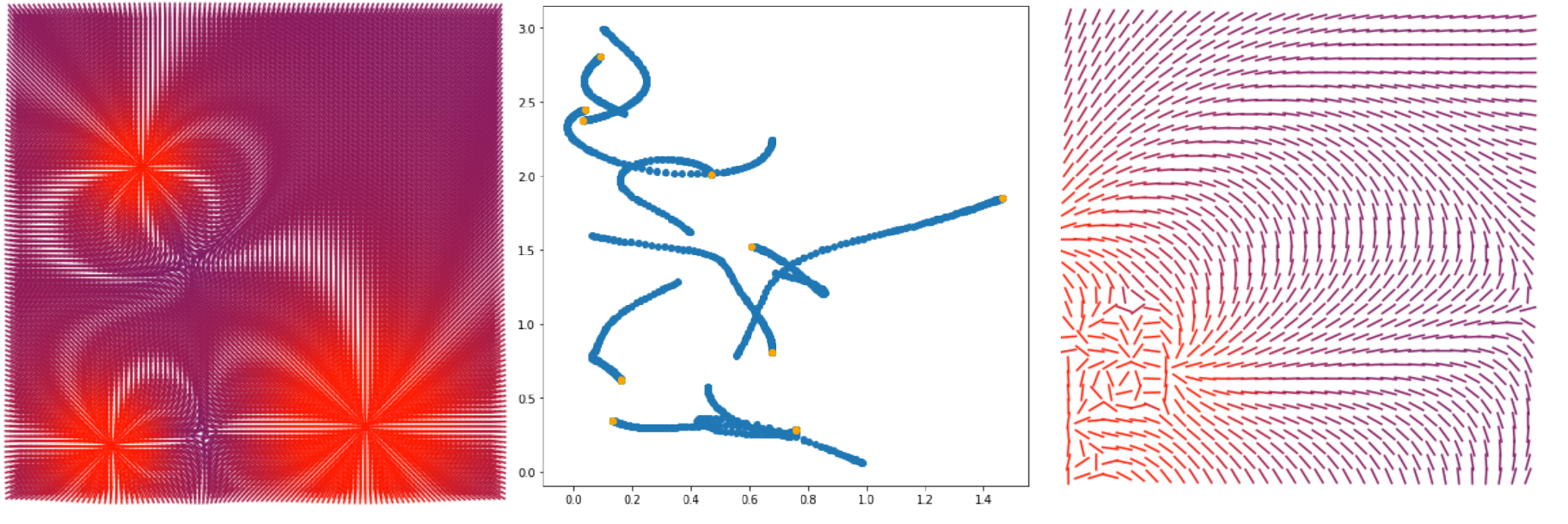
好吧,这是关于如何使这种简单的事情的简短说明。 但是,如果您玩花会发生什么:
所有代码与演示 import random class Vector(list): def __init__(self, *el): for e in el: self.append(e) def __add__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] + other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self + other def __sub__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] - other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self - other def __mul__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] * other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self * other def __truediv__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] / other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self / other def __pow__(self, other): if type(other) is Vector: assert len(self) == len(other), "Error 0" r = Vector() for i in range(len(self)): r.append(self[i] ** other[i]) return r else: other = Vector.emptyvec(lens=len(self), n=other) return self ** other def __mod__(self, other): return sum((self - other) ** 2) ** 0.5 def mod(self): return self % Vector.emptyvec(len(self)) def dim(self): return len(self) def __str__(self): if len(self) == 0: return "Empty" r = [str(i) for i in self] return "< " + " ".join(r) + " >" def _ipython_display_(self): print(str(self)) @staticmethod def emptyvec(lens=2, n=0): return Vector(*[n for i in range(lens)]) @staticmethod def randvec(dim): return Vector(*[random.random() for i in range(dim)]) class Point: def __init__(self, coords, mass=1.0, q=1.0, speed=None, **properties): self.coords = coords if speed is None: self.speed = Vector(*[0 for i in range(len(coords))]) else: self.speed = speed self.acc = Vector(*[0 for i in range(len(coords))]) self.mass = mass self.__params__ = ["coords", "speed", "acc", "q"] + list(properties.keys()) self.q = q for prop in properties: setattr(self, prop, properties[prop]) def move(self, dt): self.coords = self.coords + self.speed * dt def accelerate(self, dt): self.speed = self.speed + self.acc * dt def accinc(self, force): self.acc = self.acc + force / self.mass def clean_acc(self): self.acc = self.acc * 0 def __str__(self): r = ["Point {"] for p in self.__params__: r.append(" " + p + " = " + str(getattr(self, p))) r += ["}"] return "\n".join(r) def _ipython_display_(self): print(str(self)) class InteractionField: def __init__(self, F): self.points = [] self.F = F def move_all(self, dt): for p in self.points: p.move(dt) def intensity(self, coord): proj = Vector(*[0 for i in range(coord.dim())]) single_point = Point(Vector(), mass=1.0, q=1.0) for p in self.points: if coord % p.coords < 10 ** (-10): continue d = p.coords % coord fmod = self.F(single_point, p, d) * (-1) proj = proj + (coord - p.coords) / d * fmod return proj def step(self, dt): self.clean_acc() for p in self.points: p.accinc(self.intensity(p.coords) * pq) p.accelerate(dt) p.move(dt) def clean_acc(self): for p in self.points: p.clean_acc() def append(self, *args, **kwargs): self.points.append(Point(*args, **kwargs)) def gather_coords(self): return [p.coords for p in self.points]
下一篇文章可能会涉及更复杂的建模,以及流体和Navier-Stokes方程。
UPD:我的同事
在这里写的一篇文章
感谢
MomoDev帮助渲染视频。