下午好 如您所知,俄罗斯的道路远非最佳,因此,通过选择操作模式或算法来适应与路面类型相适应的汽车主动悬架的开发和编程仍然很重要。
我将给出一些电气图和建议。
首先,您需要确定微处理器的类型-微控制器。 我建议您选择现代的快速32位STM微控制器或类似产品-英飞凌的最佳选择。

正确的电源和线束设计是影响电路可靠性的最重要因素之一,也是电路可靠性的关键。 我建议您在微处理器设计中使用带有串行总线SPI的多通道LDO稳压器来控制电源模式,紧急关闭和监视(电源正常)。

接下来,我们继续开发“动力装置”。 我们为弹性元件-阻尼器设计了一种控制方案:
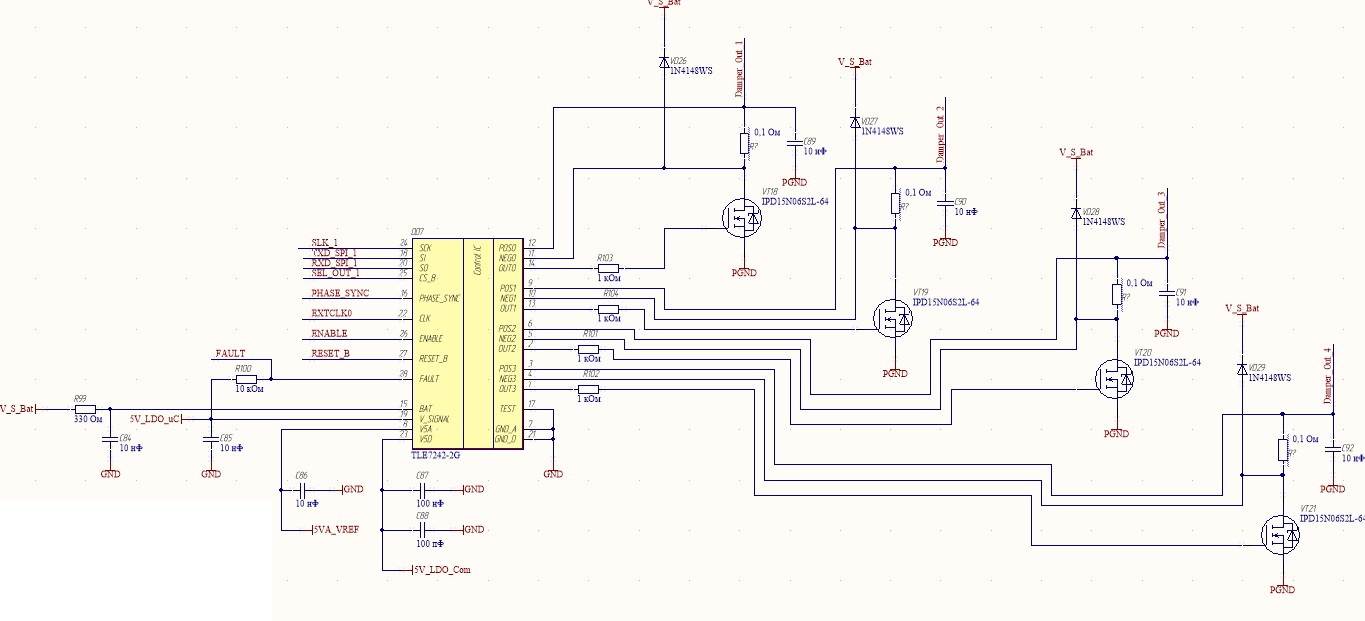
最好选择经过汽车行业认证的专用芯片,例如TLE7242 Infineon。 它包含用于使漏源输出电路过载的MOSFET控制电路。
对于气泵控制阀,应使用具有防止温度升高,负载短路和过电压的内置保护的智能钥匙:
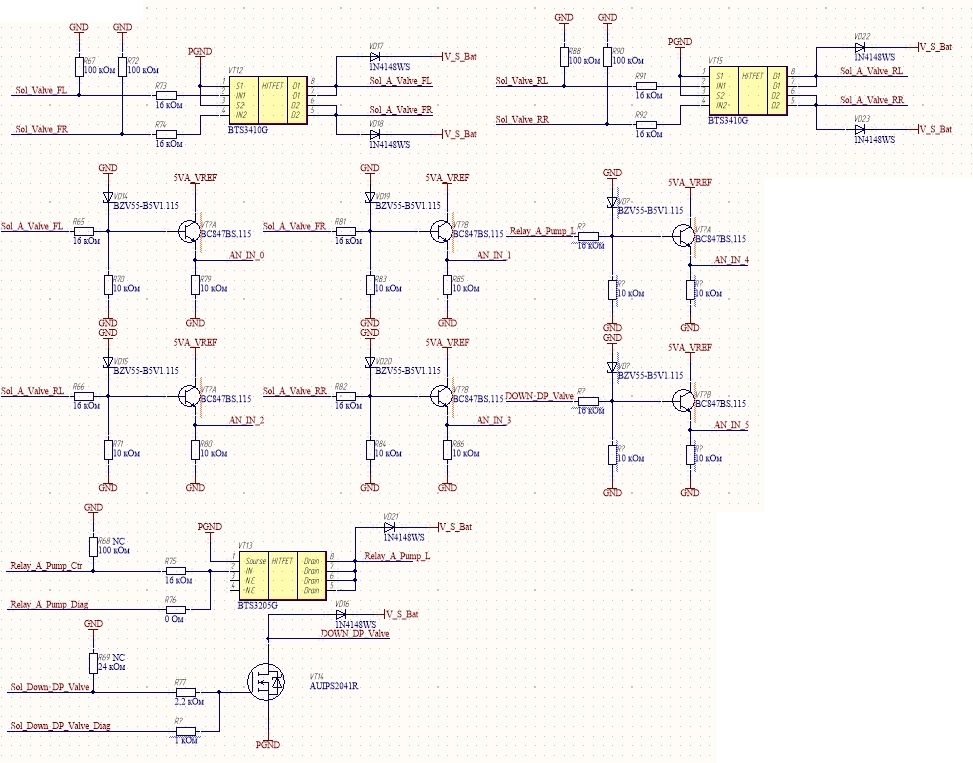
和Air_Valve_Pump空气泵阀:

设计“动力单元”后,我们继续开发用于连接加速度传感器的电路。 由于编程的相对简单性,两线制线路和较低的信息传输频率,我们选择了通过I2C接口进行串行数据传输的协议。 确保将其拉至+ 5V,+ 12V和TVS二极管电源电路,以防止+ 12V网络的输入电压和极性反转。 我使用了ADI公司的多路复用器进行顺序通道切换:

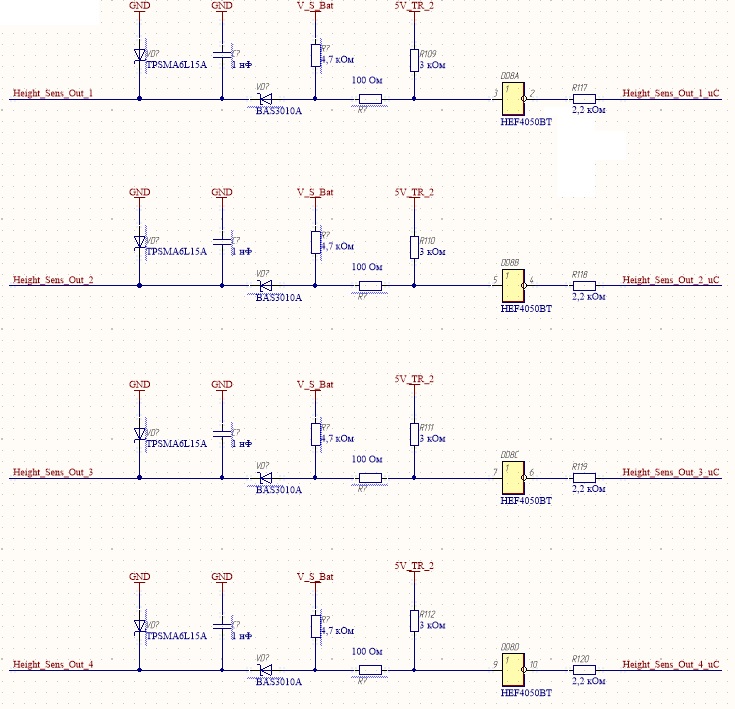
高度传感器的连接图非常简单,微控制器在上升沿的I / O引脚上读取信息:
为了配置和校准该单元,使用了两个独立的CAN收发器,它们是在带有内置ESD保护的TLE6250芯片上制造的。 为了保护差分传输线,我还安装了PESD2CAN抑制器。
关于块编程的几句话。 源代码用C编写,用于底层节点之间的通信以及SPI,I2C,CAN等通信协议。 为了从顶层控制块,MatLab&Simulink程序通过C编译器和数学包的内置函数来转换主要变量。