在讨论有关
面向模型设计的上一篇文章时
,出现了一个合理的问题:如果我们使用实验数据,但是否有可能做得更轻松,将数据放入“系统标识”并获得对象模型,而完全不用理会物理学? 是否不使用Rabinovichi研究Navier-Stokes,Bernoulli和其他卡尺罗盘的各种多层公式? 我们测试了对象-得到了结果。
我们将FAU2导弹模型作为单个传递函数进行了介绍,
您可以在此处看到它……而且似乎一切正常。 当有一个魔术按钮可以从测试中获取模型时,为什么我们需要首先研究数学分析和微积分?
实际上,可以采用这种方法,但这需要两个条件:
- 该对象应该已经(不适合设计的对象)。
- 测量数据必须完整可靠。
在任何其他情况下-“他们想要最好的,结果还是一如既往”(c)。
例如,在
一篇关于电驱动器仿真的文章中,表明“对于测量仪器精度的某个阈值,驱动器模型变得无法识别,从而导致可控性丧失和无法诊断”
在同一篇文章中,我们将分析来自TAU的传递函数形式的魔术和创建模型的魔术,然后我们将进行一次展示这种魔术的会议。
所以首先魔术
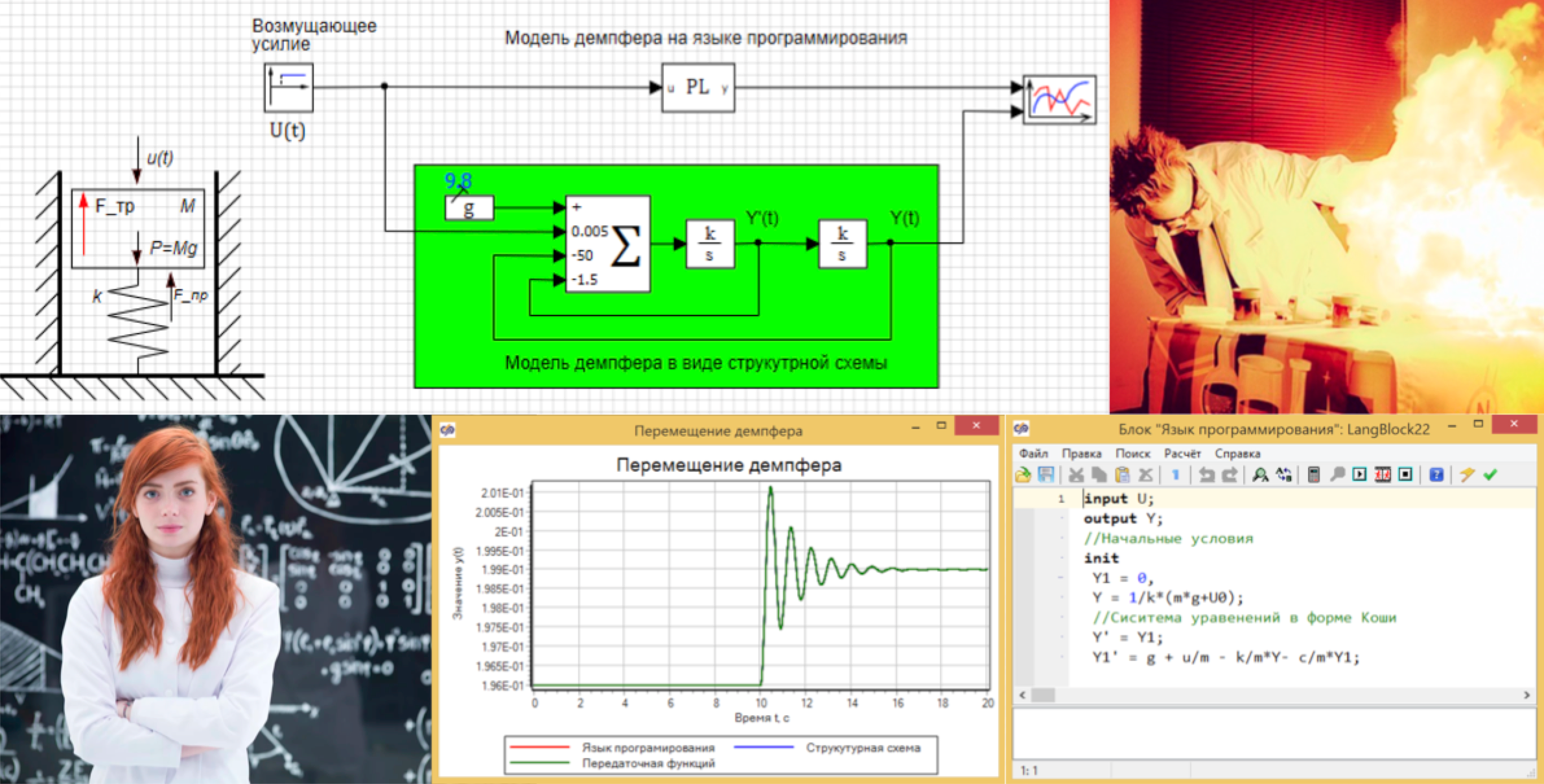
让我们看一个简单的例子。 我们有一个机械阻尼器的模型。 这是弹簧上的活塞,它在气缸内移动,可以上下移动。 它的位置是我们感兴趣的函数Y(t),扰动力(U(t))从上方作用在其上,粘性摩擦力作用在活塞壁上。 (见图1)
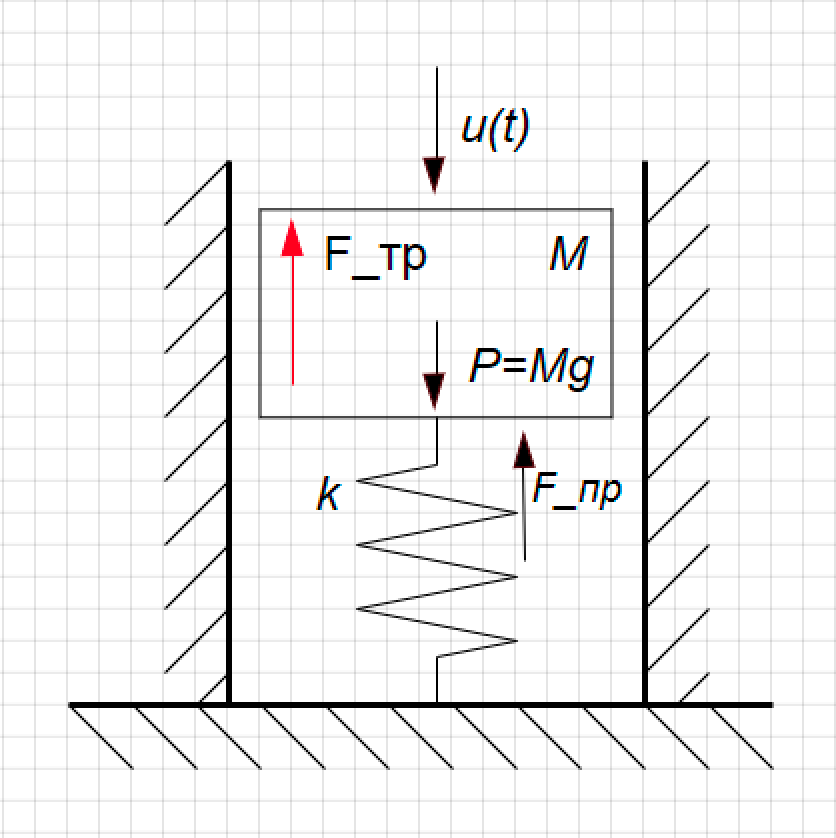 图1.减震器的设计。
图1.减震器的设计。我们导出该链接的传递函数。
那些已经熟悉传递函数魔术的绝地武士可以略过这一部分而直接讲解魔术,对于年轻的Padawans,我们将展示获得动力学方程式的全部技术。
根据牛顿第二定律,身体的加速度与作用在身体上的力之和成正比:
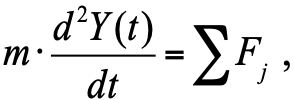
,(1)
其中
m是体重;
F j-作用在车身上的力(阻尼器活塞)。
将等式(1)代入图1中的所有力。 1,我们有:

(2)
其中:
Y(t)是活塞的位置;
P = m∙g-重力;
F_pr = k∙Y(t) -弹簧阻力;
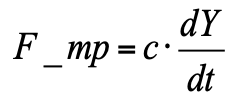
-粘性摩擦力(与活塞速度成比例)。
等式(2)中包含的力和系数的尺寸:

我们认为在零时活塞处于平衡状态。 然后,活塞的初始位置为y
0,处于平衡状态,其中速度和加速度为0,可以根据公式2计算。
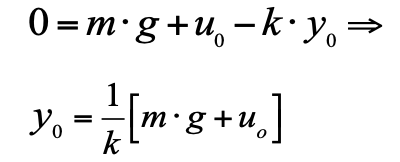
通过此方程式,您可以计算出活塞在不同负载下的位置。 静态特性:作用力-接收位移。 它在我们的系统中的外观非常简单(见图2):
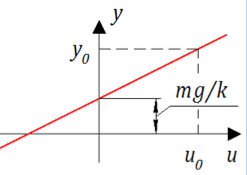 图2.阻尼器的静态特性。
图2.阻尼器的静态特性。似乎在这里很幸福-一条简单的线,当它施加力时,它会位移。 但是就在这里! 我们对活塞的最终位置不感兴趣,但对从一种状态过渡到另一种状态的过程不感兴趣。
为了分析瞬态过程,建立了TAU的自动控制理论。 根据根据该理论的典型的“用于创建模型的技术”,建议不以绝对值而是以偏离平衡状态的方式来考虑系统。 这样的陈述简化了解决方案和构造。 实际上,如果我们用偏差替换绝对值,则会得到:
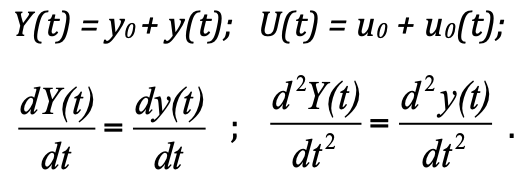 F_pr = k∙(y 0 + y(t))= k∙y 0 + k∙y(t)
F_pr = k∙(y 0 + y(t))= k∙y 0 + k∙y(t)是弹簧的阻力;

-摩擦力。

但是由于我们接受了在初始时刻的平衡状态,并且处于平衡状态的三个力的总和为零,因此我们可以将它们从方程式中删除,结果是:
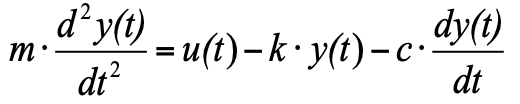
(4)
为了将方程式转换为符合TAU规范的形式,必须将整个方程式除以k,以使系数y(输出变量的值等于1),并将输出值为
y(t)的因数传递至右侧,而将输入值传递至左侧影响
u(t) :

(5)
该等式已经可以用运算符形式编写:

(6)
其中:
 p = d / dt
p = d / dt是微分算子。 请注意,系数的维数具有时间常数的维数和含义:
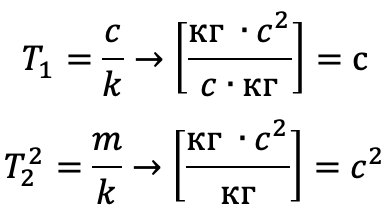
此类方程式[6]的传递函数具有以下形式:

现在,在您的眼前,我们从物理学方程式中获得了块形式的传递函数,而且,得到的块是TAU的标准振荡链接。
对我个人而言,这里的魔力是物体的静态特征,系统部件,活塞的质量,弹簧弹性,壁上的摩擦力的魔幻外观,神奇地表现出系统瞬变的暂时特征。
用模型检查公式
正如
马克西姆·安德列夫(Maxim Andreev)教给我的那样,在创建动态模型时,“结局就是一切!” (
请参阅此处的第二个建模原理-“从头开始” ):
在功能结束时,我们进行了移动。
因此,想象柯西形式的方程式2移动。
Cauchy形式是当左边是我们感兴趣的函数的导数时,右边是用于计算它们的表达式。 由于方程中的导数是二阶的,因此引入了一个新的变量Y1-位置变化率(位移速度),我们得到了一个具有柯西形式的两个方程组:
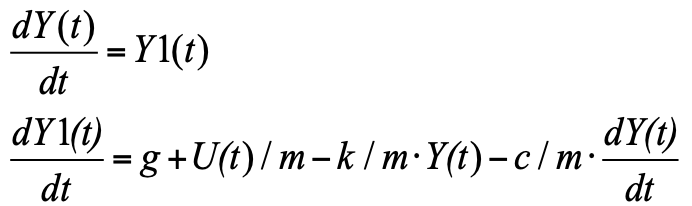
该方程式可以简单地写在“编程语言”块中并得到模型(见图3):
 图3.编程语言中的阻尼器模型。
图3.编程语言中的阻尼器模型。作为输入,我们使用力U的值,块的输出为位移Y,初始位置由公式3给出。所有变量均设置为项目的全局信号:
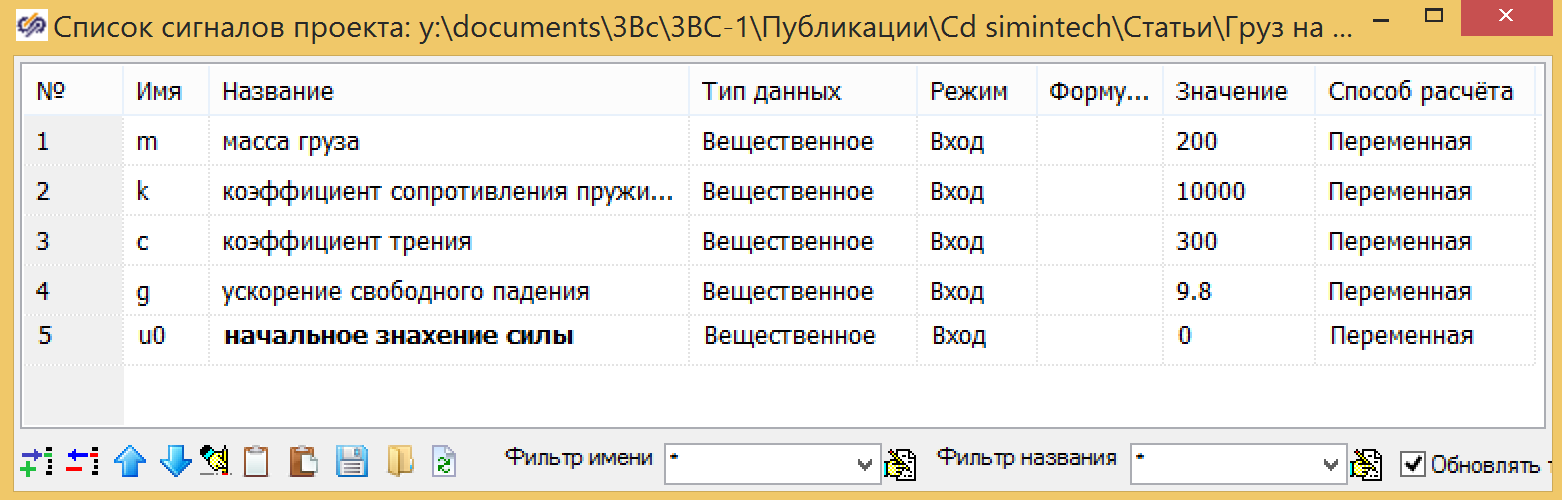 图4.全局项目变量。
图4.全局项目变量。阻尼器模型也可以以结构的形式创建,在图5中显示了从标准块创建的并行阻尼器模型,其中初始条件在输出的积分器中(见图6),系数输入到加法器中(见图6)。 。7)
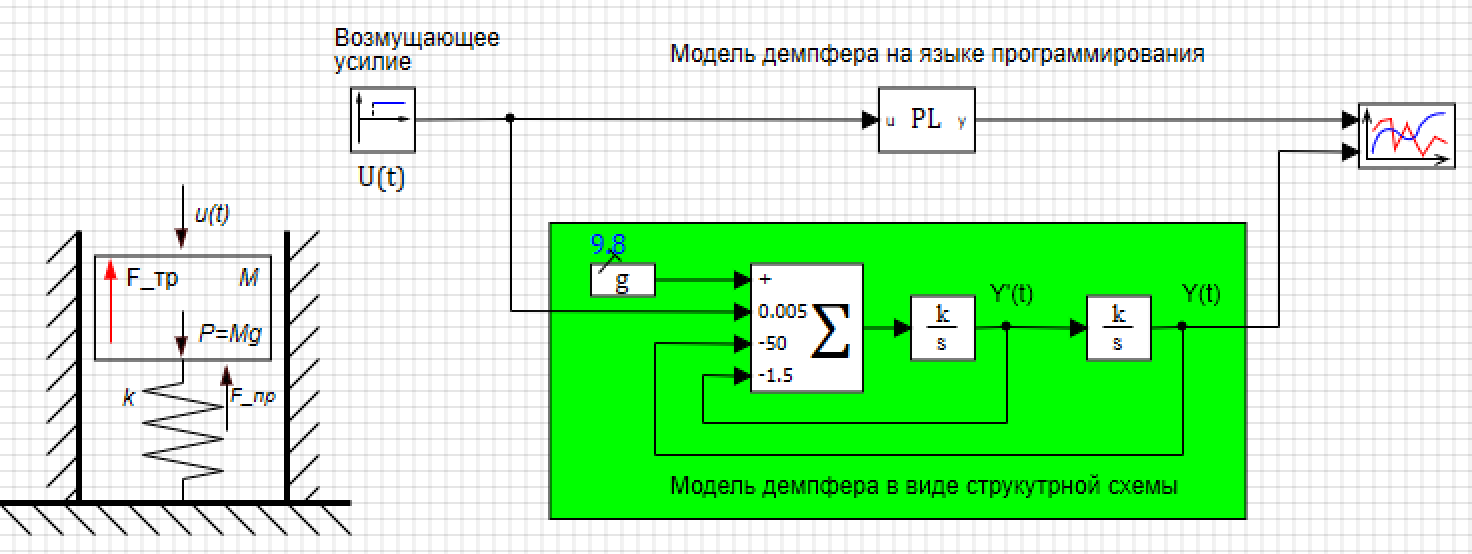 图5.用编程语言和结构图形式的阻尼器。
图5.用编程语言和结构图形式的阻尼器。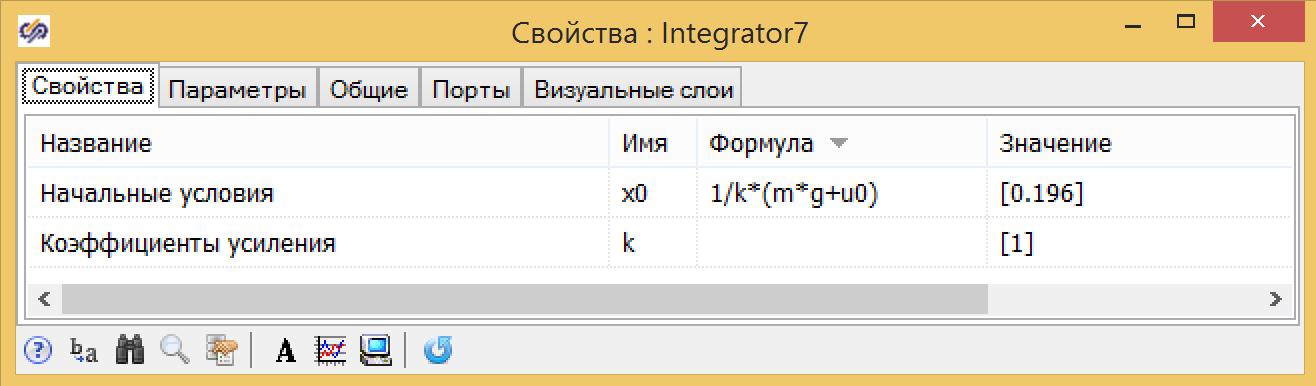 图6.具有初始条件的积分器属性。
图6.具有初始条件的积分器属性。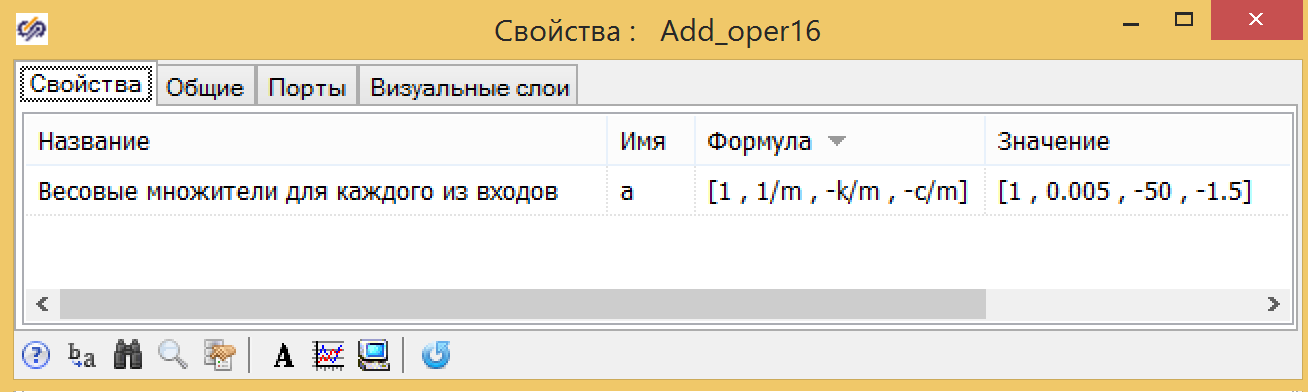 图7.带系数的加法器的属性。
图7.带系数的加法器的属性。我们将扰动效果设置为10秒钟,将作用力从0突然更改为30,并确保两个模型显示相同的结果(见图8)。
 图8.移动阻尼器。
图8.移动阻尼器。让我们以一般形式的传递函数形式和振荡链接的形式来检查模型,该系统就是该系统。 为此,我们组装电路,如图9所示。
 图9.传递函数形式的两个阻尼器模型。
图9.传递函数形式的两个阻尼器模型。必须考虑我们以偏差形式编译图表,因此,要获得绝对值,必须添加一个常数-活塞的初始位置。
对于传递函数(公式7),我们使用相同的全局常数和较早获得的针对
k 1 ,T 1 ,T 2的表达式(见图10)。
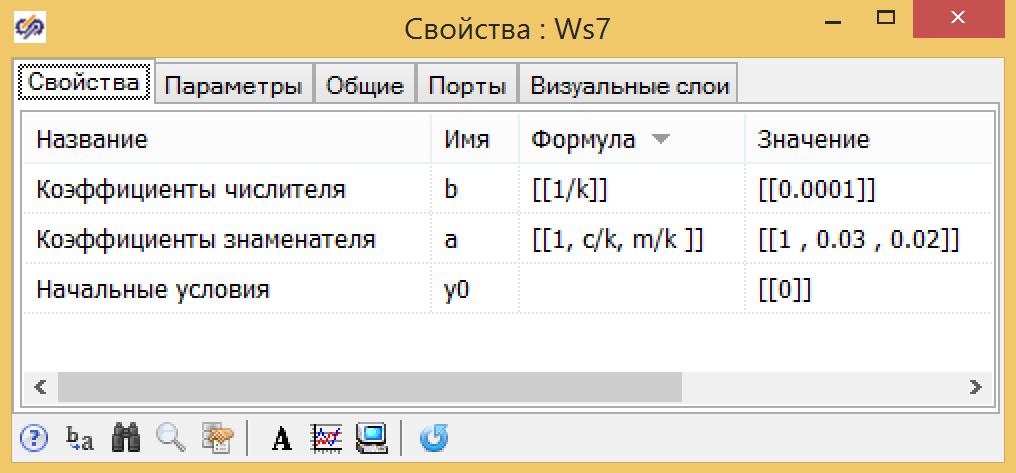 图10.传递函数参数的一般形式。
图10.传递函数参数的一般形式。对于振动环节的参数,公式有些复杂,但也可以用整体参数来表示:活塞质量m,弹簧阻力系数k,摩擦系数s(见图11)。
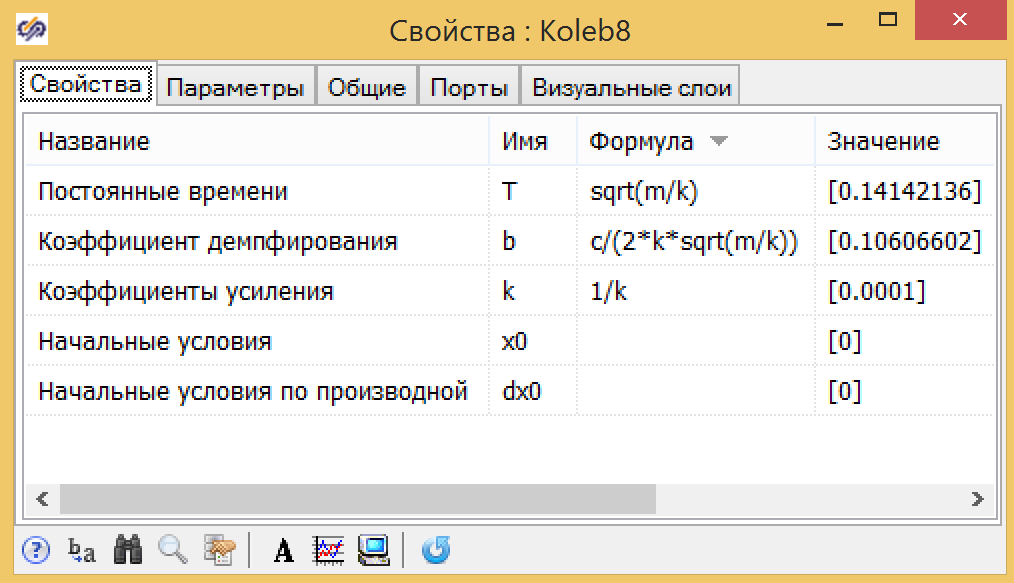 图11.振动连杆的参数。
图11.振动连杆的参数。过渡图显示(见图12)TAU魔术确实有效。 传递函数给出的结果与基于物理方程的模型完全相同。
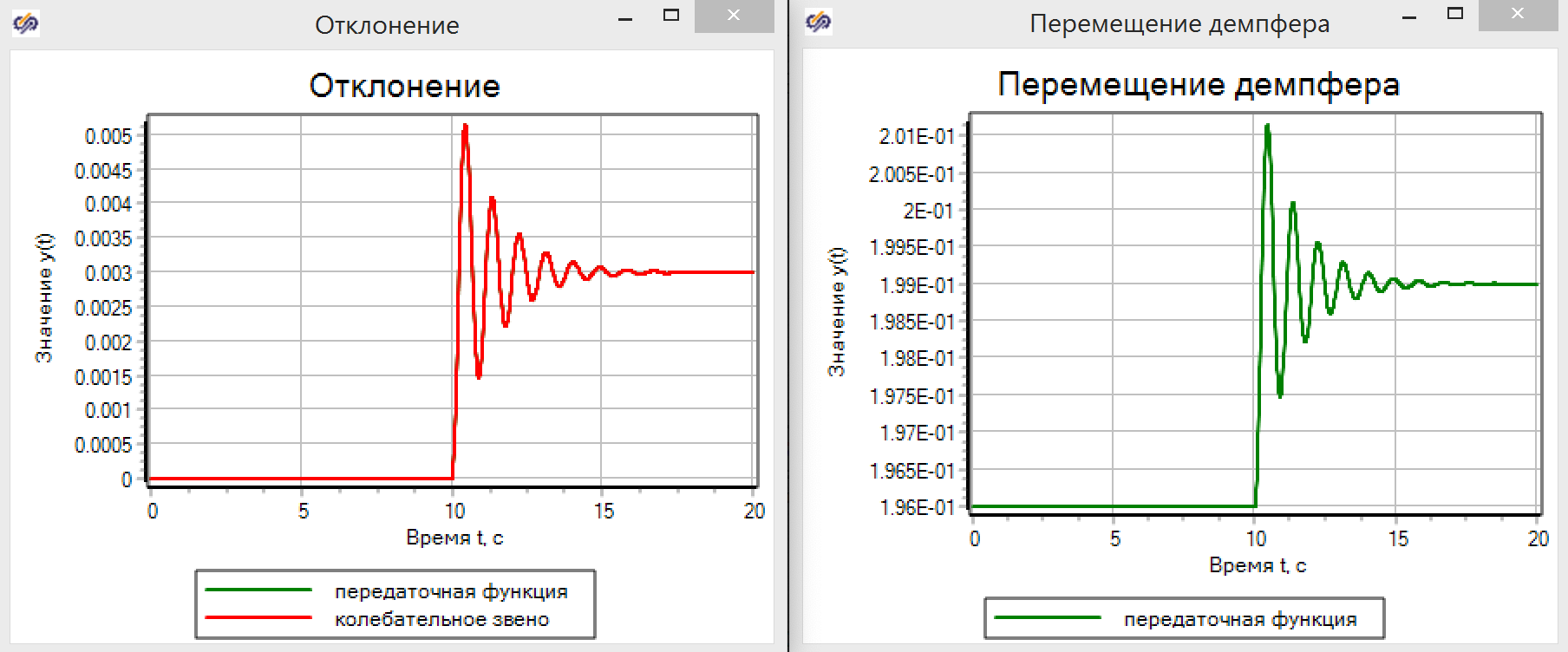 图12.在TAU模型中移动阻尼器。
图12.在TAU模型中移动阻尼器。想象一下,我们没有模型,而是根据从实验中获得的数据使用识别单元。 有一整套数据分析和传递函数技术,但是作为本文的一部分和作为示例,我们将以编程语言的形式将传递函数构建块连接到模型,如图13所示。我们相信我们有一个“黑匣子”模型,并且我们不知道里面有什么。
 图13.伪标识符的连接方案。
图13.伪标识符的连接方案。通过使用一种编程语言对我们的块进行分析的结果,我们获得了一个传递函数,该传递函数实际上与最初的传递函数没有区别,该传递函数是根据方程式得出的(见图14)。 与图10进行比较。这是一个魔术按钮!
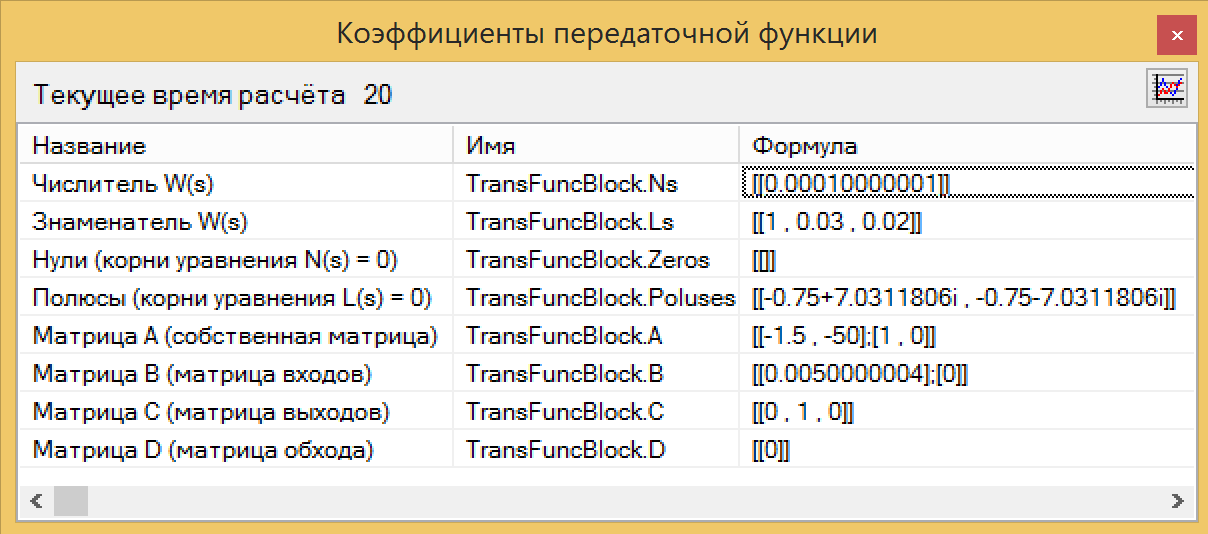 图14.传递函数的识别。
图14.传递函数的识别。分子和分母的值可以直接从识别块中复制,粘贴到传递函数块中,并确保图形匹配。 TAU魔术作品。
魔术表演
那么,当一切如此神奇时,为什么不总是在面向模型的设计过程中始终使用系统标识呢?
要了解通过识别“系统标识”黑匣子获得的模型的缺点,请尝试回答一个简单的问题:当活塞质量增加30%时,阻尼器的偏差是多少?
然后证明并非所有的酸奶都同样有用。
如果您有诚实的方程式,则只需更改项目全局变量中的负载质量,即可获得新的过渡过程和新的传递函数。

在这种情况下,您需要根据实验结果构造一个现成的传递函数,而不是诚实的物理方程,而您需要再次运行并进行实验,以了解质量变化将如何影响模型的行为。 就像他们说的那样,坏的头不能使腿得到休息。
结论:
- 坐下来思考物理方程总是比做实验更有益,更便宜。
- 从过程的物理方程式导出的模型比传递函数更美味,更有用。
- 实验应阐明未知系数或难以测量的参数。
- 学习物理,你会快乐的!
带有阻尼器模型的实验文件
可以在这里获取...