 阿波罗11号在月球上
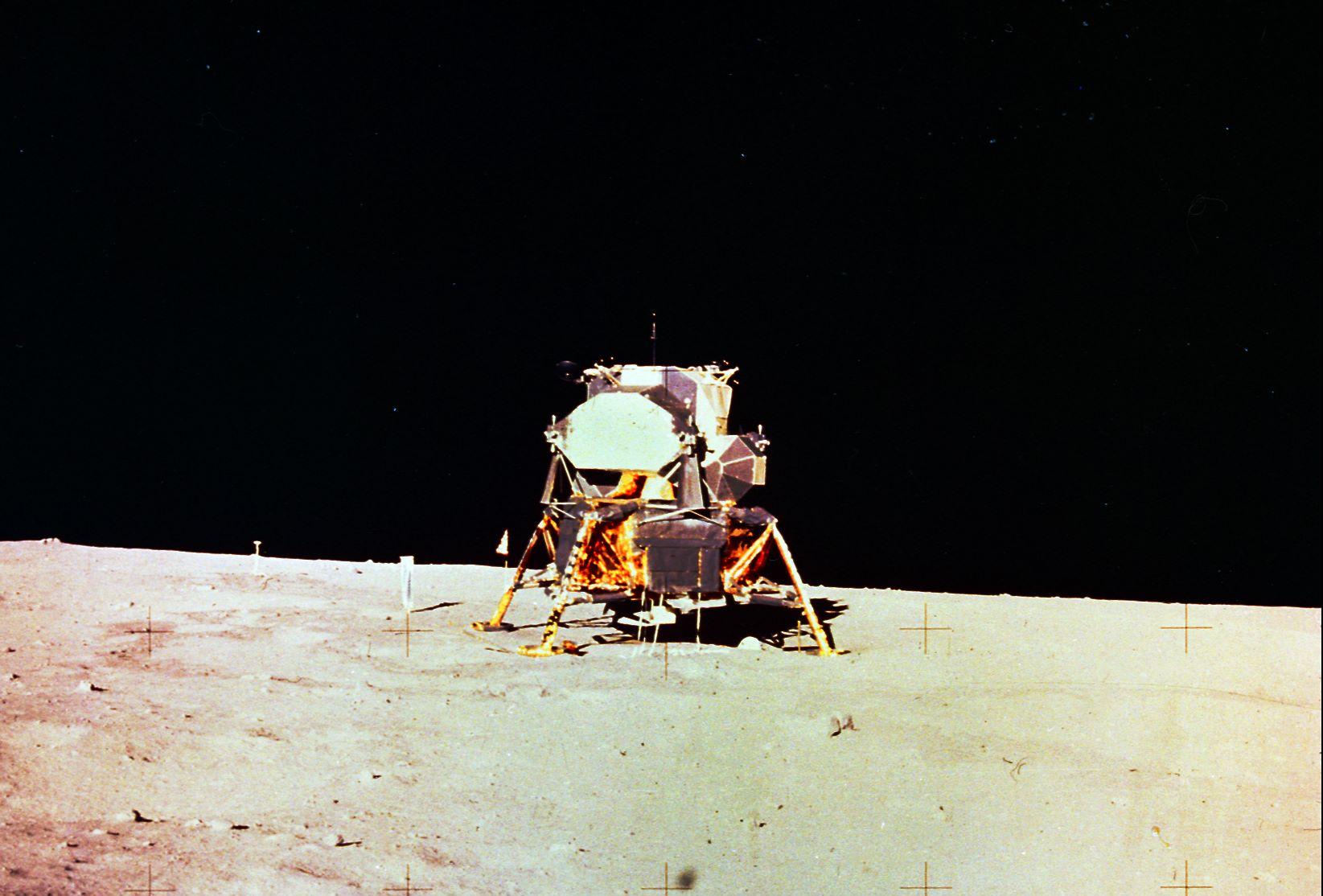
阿波罗11号在月球上五个月后,阿波罗12号在加速过程中幸免于难,并坐在月球上。 多亏了我们添加到程序中的新“名词69”,以允许团队根据地面跟踪数据更改位置,宇航员Pete Conrad和Alan Bean能够将月球舱降落在无人驾驶的步行距离内1967年4月降落在月球上的验船师号。阿波罗12号的精确降落为在更复杂的地形上降落铺平了道路。
仅在Apollo 12之后,我们才开始理解其他严重问题。
我从Grumman Aerospace(登月舱制造公司)的Clint Tillman注意到油门振动的时候开始,该发动机在模拟最终着陆阶段时发动机推力约为5%。 这促使蒂尔曼研究了阿波罗11号和12号的遥测数据,在那里他注意到着陆的最后阶段的波动,其峰到峰的幅度为25%(见图12)。 在这段时间里,舰长可以同时使用ROD开关控制下降速度和操纵杆来操纵舰船。 由于这些数据的图形类似于城堡(或城堡螺母)的墙壁和塔,因此此问题称为“节流堡垒”。
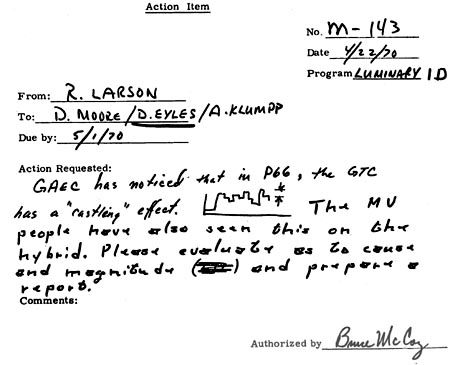
图 11:第一次油门报告
剑桥的钳形电路描述了激发未知现象的振荡源,他将其称为“ IMU鲍勃” [18]。 IMU位于船的重心上方,距船的重心4英尺。 较小但快速的操作(例如在最终降落期间)将船扔了下来,因此加速度计将其解释为船垂直速度的变化。 反过来,这影响了垂直速度的计算以及所需牵引力的评估。
但是,该理论仅部分解释了在飞行数据中观察到的油门行为。
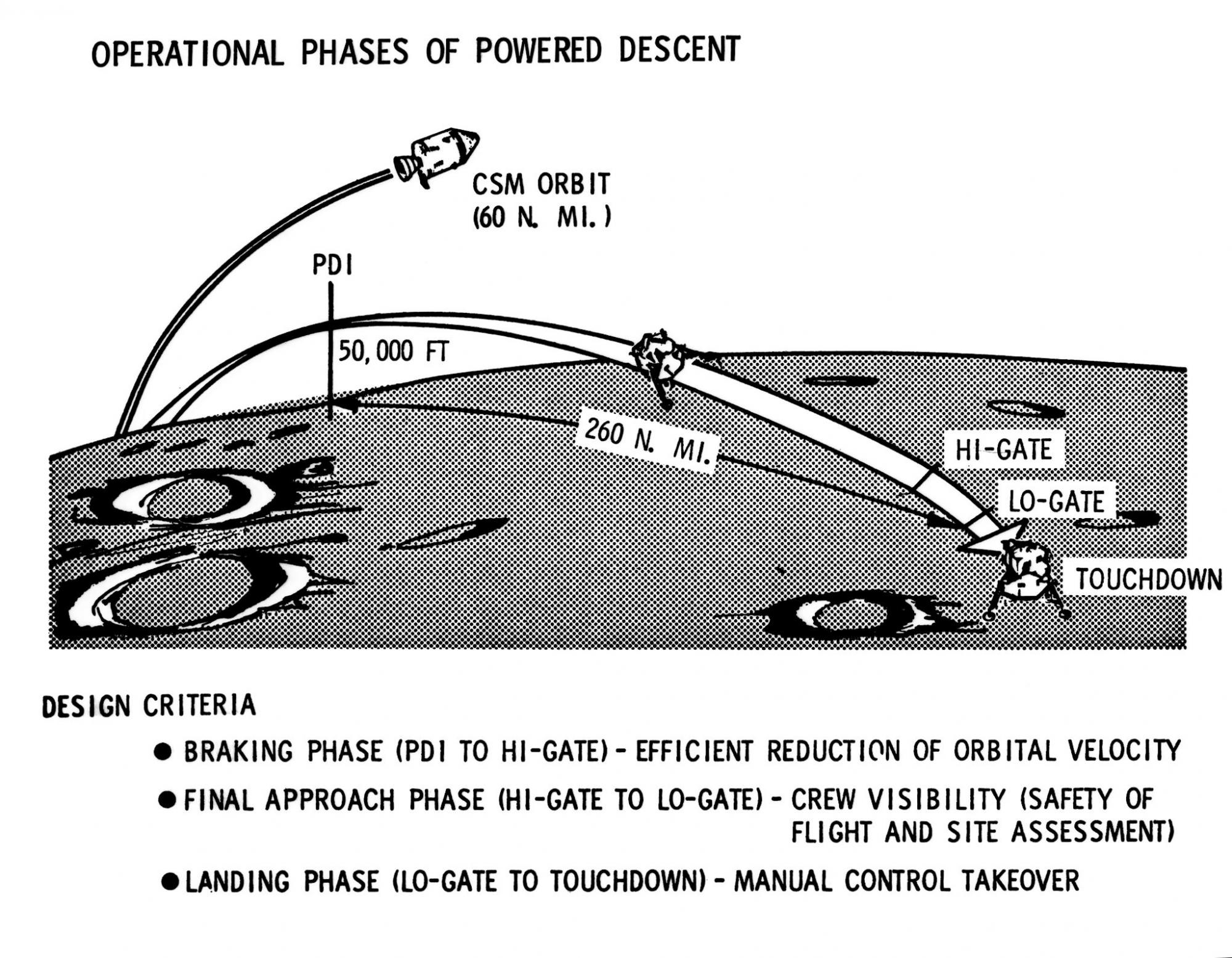
节流型火箭发动机曾经是而且仍然很少见,但是需要节气门发动机才能在月球上进行软着陆。 固定推力发动机和非常简单的运动方程式可使飞船降落在月球表面上的期望点上。 但是为了能够坐下来倒下来,平稳地移动,将着陆点保持在可见区域内并且能够悬停在着陆点上,我们需要一种能够平衡月球重力,随着汽车质量降低以及在操纵过程中推力矢量发生变化时改变牵引力的发动机当宇航员想改变下降速度时
运动方程式确定了要赋予设备的加速度,幅度和方向。 自动驾驶仪进行操纵,以使牵引力对应于给定方向。 油门控制程序的任务是控制牵引力。 节流控制开始于计算月球模块的质量。 知道质量后,我们确定将船舶加速度(相对于加速度计测量的加速度)更改为符合运动方程式所需的值所需的油门校正量,然后将结果值转换为油门组件使用的单位(每脉冲约2.8磅),并将它们发送到硬件接口。
IMU中的加速度计实际上并未测量加速度,而是测量相对于上次读取的速度增量。 由于前一次迭代期间的节流变化发生在加速度计读数之间的某个点,因此测得的delta-V并未显示出最新变化的全部效果。
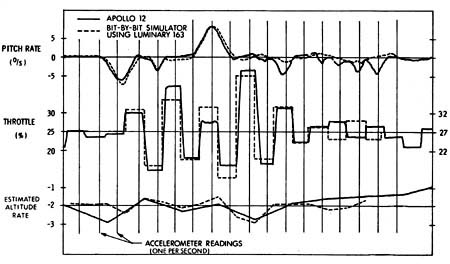
图 12:阿波罗12航班P66阶段的节流变化[19]
节气门控制应该可以弥补这种影响。 一系列补偿取决于在此期间何时发送节气门指令,还取决于发动机执行节气门指令的速度。 实验研究已经确定,节流具有0.3 s的延迟。
这使作者可以编程和测试油门控制程序。 在使用0.3 s延迟的精确DPS模型的仿真图中,我观察到在不补偿油门延迟的情况下,油门位置发生较大变化后,实际推力出现了振荡。 当打开补偿0.1 s时,我看到了振荡如何降低。 当我将补偿设置为0.2 s时,振荡几乎消失了。 到此为止。 克鲁姆普回想起我说过的话:“就像药物一样,您不需要付出不必要的补偿。”
克鲁姆(Klump)知道这不是“治愈方法”,但他从未坚持要我编程正确的价值。 Klump在解释15年后的动力时写道:
“我认为建立自信非常重要,这使同事即使不是最佳问题,也可以就小问题做出决定。 因此,我保留了自己的想法,并坚持了唐的现行决定,至少直到他自己修改该决定为止[20]。
在解释自己的动机时,我相信在已经超负荷的节流程序中,我对补偿感到恼火,这可能导致了人们希望将补偿降低到最小。 尽管如此,Apollo 11和Apollo 12都以0.2 s的补偿飞行,油门延迟为0.3 s。
但是现在,无论是Klump的分析[21]还是JA Sorensen在Bellcomm撰写的独立报告[22]都得出结论:“节流命令P66的振荡性质显然是由于实际值着陆发动机的时间常数小于预期的时间”(Sorensen)。 Klump重新检查了数据。 改进了登陆引擎的参数,但未对文档进行相应的更改。 着陆发动机的实际延迟约为0.075 s。 事实证明,我们甚至对其进行了过度补偿。 结果,节流阀处于稳定的边缘。
Clampp的分析得出了更为惊人的结果。 他表明,如果Apollo 11软件补偿了0.3秒,则油门将不稳定。 油门振动会变得更大,而不是平息下来。 在IMU通电后,在P63或可能在P66进行节流之后,DPS发动机将在最小推力和最大推力之间快速振荡。 无疑,飞行控制将在逻辑上将节气门行为与警报1202相关联,而警报1202具有完全独立的原因。
事故是不可避免的。 以我的拙见,如果作者在油门控制程序中编码了“正确”的值,那么Apollo 11永远不会坐下来。 我邀请一个没有个人兴趣并且精通数学的人再次验证这一理论。
手动登月
* * *
我们调整了油门延迟,仿真表明油门位置的不稳定性已经消失。 阿波罗13号任务软件进行了更改,但此任务并未降落在月球上。
奇怪的是,在节气门问题出现之前对Apollo 13软件进行了更改,如果节气门控制自动化无法正常工作,它可以提供备用选项。 定义了一个新的“名词92”,机组人员可以选择查看控制系统产生的油门水平。 删除了在油门切换到手动模式时将停止自动控制的逻辑。 这些变化[23]允许宇航员在阶段P63和P64期间控制油门,同时控制系统继续控制船的运动。 我不知道是否曾经使用过这些复杂的程序。
行政超载警报已被解决多次。
起飞期间,接近雷达开关位于LGC位置。 在后续任务中,清单已更改。 我们向LUMINARY添加了逻辑以检查接近雷达的工作模式,如果不是LGC,则将接近雷达计数器重置为零。
艾伦·克卢普(Alan Clump)从不同的角度研究了高管。 他发现,当计算机定期发生TLOSS或计算机的活动级别在存在TLOSS的情况下发生了变化,并且SERVICER任务没有完成,并且在执行位置计算命令以将其发送到自动驾驶仪时,该任务被中断了,软件重新启动并没有清除它,以便待稍后恢复-在这种情况下,自动驾驶仪的位置计算可能会不正确。 在阿波罗13号的飞行中,克卢普(Klump)开发了一种解决方案,其中所有SERVICER的工作都进行了重置,以在必要时进行调整。
 月球着陆阶段
月球着陆阶段但是将来,这些变化都没有使我们摆脱定向系统固定的两秒周期的限制。 为了在困难的地形上着陆,有必要在雷达程序中添加一个地形模型。 定向系统的修改留给以后使用。 我们没有时间做所有事情。
我们开发了一个称为“ SERVICER变量”的概念,其中可以在必要时延长定向程序的时间。 担心两秒间隔内置在软件中的担心被证明是没有根据的。 只需测量定向系统的运行时间,并使用该值代替仅在少数公式中使用的两秒值即可。 我们在LUMINARY的脱机版本中实现了SERVICER的工作版本,并展示了其对TLOSS的极高抵抗力[25]。
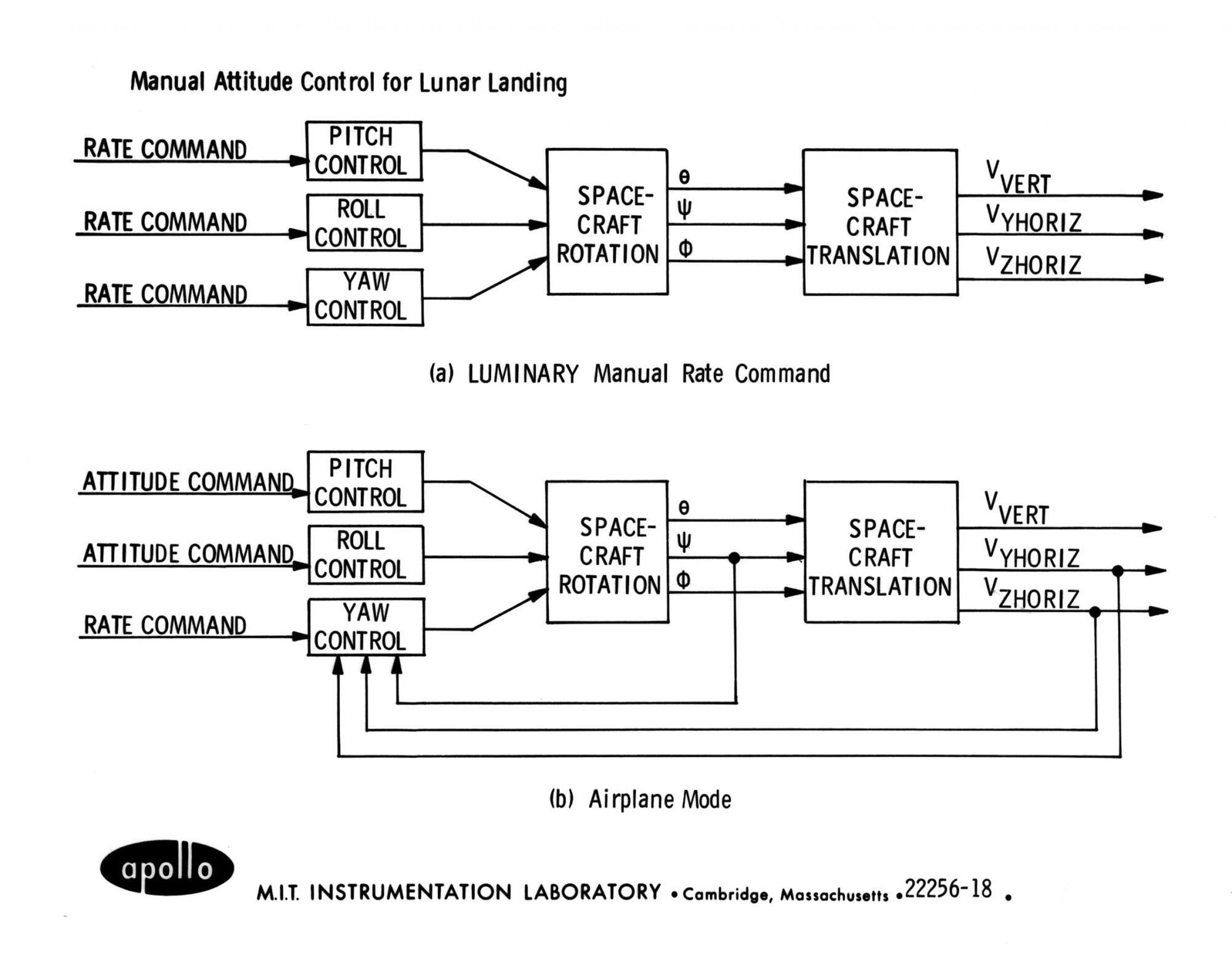
不受两秒限制的限制,因此可以考虑其他想法。 宇航员约翰·杨(John Young)提出了一项改进,我们称之为P66 LPD。 但是到了这次,P66的程序比阿姆斯特朗的Apollo 11飞行时要灵活得多,其中一项新功能是,如果团队将ATT HOLD模式切换为AUTO,则定向系统将导致零水平速度。 Young的想法是让LGC显示LPD角度(如在可见阶段),如果此时自动驾驶仪切换到AUTO [26],它将向指挥官显示登月舱飞行的点。
为了确保执行此功能的准确性,软件必须在宇航员切换到“自动”时立即做出响应,速度要超过2秒,甚至快于允许的第二个周期,P66的某些部分可以正常工作。 我们开发了一个版本,其中的任务每四分之一秒启动一次,检查自动驾驶仪模式更改,发送方向和油门命令,并尽可能快而准确地响应ROD开关的输入。 在卡纳维拉尔角的月球模块模拟器(LM Mission Simulator,LMS)上进行的人为模拟中,在窗口中可以看到其神话般的地形模型,我们证明了该系统有助于非常精确的着陆。
“ SERVICER变量”和P66 LPD均未安装补丁。 美国宇航局已经决定,阿波罗17号将是最后一个。 剩下的任务非常少,因此理事会做出了保守的决定-着陆软件不应有任何重大变化。 通过使从着陆雷达接收到的数据与加速度计的读数同步,Robert Covelli释放了足够的时间来压缩那里的阿波罗15、16和17的地形模型。
 MIT实验室的惯性模块(IMU)
MIT实验室的惯性模块(IMU)阿波罗14号给作者带来了短期声望。 仪表板中断开关发送了一个定期信号,阻止了Alan Shepard和Ed Mitchell坐下。 我编写了监视这些情况的代码。 这个“拐杖”仅仅改变了几个寄存器,首先诱使任务中断监控器认为中断已经发生,然后删除自身,以便着陆可以继续而不会造成任何后果。 该补丁通过空中广播,并由宇航员完美地付诸行动,该程序包括在DSKY上进行61次击键。 也许阿波罗14号事件最有趣的部分是这个故事的不同版本的数量。 但是阿波罗14号则是另一个故事。
1972年12月,我前往卡纳维拉尔角(Cape Canaveral)发射了“阿波罗17号”舰。 这次太空飞行真棒。 作家汤姆·沃尔夫(Tom Wolfe)与摄影师安妮·莱博维茨(Annie Leibovitz)一起为《滚石》(Rolling Stone)杂志撰写了一个由四部分组成的短篇小说,该小说是《正确的东西》 [27]的前身。 这是阿波罗号唯一的夜间发射。 当巨大的土星V在四分之一英里长的火焰柱上高高地飞升时,佛罗里达的雾天从地平线到地平线燃烧着橙色,燃烧的火焰像喷灯一样在末端摇摆。
我花了几天的时间测试一些我们称为“可擦除内存编程”的LMS功能。 这些补丁本应使用未使用的VAC,并修复一些错误,这是阿波罗14号事件的后遗症。然后,我飞往剑桥观察着陆情况。
之后,我很喜欢听Gene Cernan和地质学家杰克·施密特(Jack Schmitt)的训练,他们在月球车上探索了月球,并在看不见飞船的地方走了3英里多。 这是有人最后一次在月球上行走。
图 13:一些参与者
很棒的照片,前排:文斯·梅格纳(Vince Megna),“医生”查尔斯·斯塔克·德雷珀(Charles Stark Draper),作家,托尼·库克(Tony Cook),戴夫·摩尔(Dave Moore); 后排:菲尔·费勒曼,拉里·伯曼,艾伦·克鲁普,鲍勃·沃纳,罗伯特·洛恩,山姆·德雷克。 小照片,前排:作者拉里·伯曼(Larry Berman),彼得·沃兰特(Peter Volante); 后排:山姆·德雷克(Sam Drake),布鲁斯·麦考伊(Bruce McCoy)。 参加活动的还有史蒂夫·科普斯,罗米尔·吉尔伯特,肯·古德温和拉斯·拉森。
参考文献[1]昆仑(AR); “阿波罗登月指导”; 麻省理工学院的查尔斯·斯塔克·德雷珀实验室,R-695; 1971年6月。
[2] Cherry,GW; “电子指导–火箭推进航天器的一般明确,优化指导法”; 麻省理工学院仪器实验室,R-456; 1964年8月。
[3] Brooks,Courtney G.等人; “载人登月航天器历史的阿波罗战车”; 美国宇航局 1979年。
[4]银,乔治; 私人通讯; 2004。
[5] Hall,Eldon C .; 月球之旅:阿波罗制导计算机的历史; AIAA,1996年。
[6]布莱尔·史密斯(休); “第二块指令”; 麻省理工学院仪器实验室,AGC4备忘录9; 1966年7月1日。
[7] Muntz,Charles A .; “第II块AGC / LGC解释器用户指南”; 麻省理工学院仪器实验室,R-489; 1965年4月。
[8] Apollo 11下行数据。
[9] Apollo 11技术人员汇报; NASA,1969年7月31日[汇报]。
[10] Apollo 11空对地语音转录技术; 美国宇航局,1969年7月[语音]。
[11]声音。
[12]汇报。
[13]阿波罗11号任务报告; NASA,SP-238。
[14]汇报。
[15]汇报。
[16]声音。
[17] Klumpp,A .; 关于监视计算机活动的实时情节的无标题备忘录; 麻省理工学院的查尔斯·斯塔克·德雷珀实验室,1970年4月9日。
[18] A. Klumpp和G. Kalan; “消除噪声并增强阿波罗LM下降率方案的稳定性和动态响应”; 麻省理工学院的查尔斯·斯塔克·德雷珀实验室,E-2543,1970年10月[噪声]。
[19]噪音。
[20]克伦普,艾伦; 私人通讯; 1985年。
[21]噪音。
[22] JA Sorensen; “ LM下降速率制导方程的线性稳定性分析”; Bellcomm Inc.,B70 06074,1970年6月25日。
[23]廷德尔,硬件,加曼,杰克; “删除离散的自动油门检查”; LUMINARY 1C程序更改请求(PCR)285,1969年9月30日。
[24] Eyles,D .; “防止盗窃LGC存储器周期的RR ECDU”; LUMINARY 1B PCR 848,1969年7月23日。
[25]艾尔斯,唐; “变量服务程序的描述”; 麻省理工学院的查尔斯·史塔克·德雷珀实验室,发光备忘录139,1970年3月3日。
[26]艾尔斯,唐; “阿波罗LM在月球下降的最后阶段提供指导和飞行员协助”; 麻省理工学院的查尔斯·斯塔克·德雷珀实验室,E-2581; 1971年5月。
[27]沃尔夫,汤姆; 轨道后悔 滚石; 1973年1月4日。