
问候Habroyuzery。 我叫Eugene,在一系列文章中,我想谈一谈为工业设备以及与之并肩工作的人们开发和测试防撞系统的过程。
但首先是一个小故事。 北方城市是我们巨大的城市。 该城市有一个大型矿山,从本质上讲,这是该市居民的主要工作地点。 星期五,工作日已经过了下午。 720米地平线上的矿工通过偷偷将酒精偷运到现场来庆祝同事的生日。 现在有一个醉酒的矿工在上浮之前要充气,但是在此过程中,他有点疲倦,在地下铁路的铁轨上打do睡以运输矿石。 他被一台电力机车惊醒,那辆机车在黑暗中没有注意到不幸的矿工在铁路上打zing睡。 由于矿机上的电力机车相撞,他失去了手腕。 一个可怕的故事,以及来自俄罗斯其他地区的许多类似故事,每次都使不同的领导人思考。 并且可以做些什么来减少或减少此类故事。 这是对系统的要求开始的地方,它将解决防止设备撞人的问题。
促使我们在2016年开始开发这种系统的问题的背景如下。 采矿是世界上最危险的职业之一。 而且在我们国家,这是仅次于石油和天然气生产的主要经济部门之一。 全世界有两种提取矿物的方法:露天(地表)和地下。
作为定位系统的开发者,我们长期从事矿山中矿工的定位工作,目前,几乎在所有矿山中,定位问题都已在某种程度上得到解决。 但是,不幸的是,继续发生与采矿设备碰撞和车辆撞向人员有关的事件。 在西方,这个问题在2006-2010年间开始通过开发和实施防撞系统来解决。 首先,这种系统被引入采石场,因为类似的事件更经常发生在采石场。 自
2019年
3月起,在俄罗斯,但不是在采石场,而是在矿山中,必须强制安装防撞系统。 在这里,我们实际上涉及传统知识以及对此类系统的要求。
俄罗斯所有采矿企业都必须遵守工业安全规定。 Rostekhnadzor(联邦生态,技术和原子监督局)会监控对这些规则的遵守情况,在开发系统时,我们主要考虑了该服务提出的要求。 但是,由于到目前为止,我国对避撞系统的要求已得到
广泛阐述 ,因此在为开发,测试方案和验收标准制定传统知识时,我们依赖于
EMESRT(地球移动设备安全圆桌会议)制定的国际文件。 这个组织将全球的采矿公司,政府机构,采矿设备制造商,服务和工程公司联合起来。
该组织为采矿业开发了管理和安全系统的分类:
- 7级-操作员意识
提供信息以增强操作员观察和理解设备附近潜在危险的能力的技术。
- 级别8-咨询控制
提供警报和/或指令的技术可以增强操作员预测潜在的不安全措施和必要的纠正措施的能力。 - 第9级-干预控制
自动干预并采取某种形式的设备控制以防止或减少危险情况后果的技术。
该系统的开发基础以及后续测试和测试方案的程序被视为“
车辆交互系统 ”文件,其中阐明了设备和人员从事采矿工作时可能出现的主要方案和情况以及可能发生的事故。
在开发用于采矿设备的系统时,应消除以下危险情况或将其造成的危害降至最低(最大程度地减少事件的后果):
- 工作站设计和外部结构造成的伤害
- 身体和/或精神疲劳造成的伤害或住院
- 在各种操作条件下,能见度受损(包括能见度失真或受损)或违反危害意识造成的损坏
- 由于操作员对环境和工具操作的限制或难以观看而造成的损坏
- 因人员和车辆在操作者的盲区中移动而造成的碰撞损坏
- 在操作,运动,铰接过程中由于机器稳定性损失而造成的危害
- 设备控制装置使用不当,校准不正确/不正确或维护和设计不当造成的损坏,均会造成损坏
- 误解显示器或标签上的信息而造成的损坏
- 遗漏或遗漏的警告和警报会造成伤害,包括精神负担
它们包含对系统本身和设备类型,通知的可视化和通知方法的要求。
您必须承认,防撞系统的要求比俄罗斯版的采矿公司工业安全规则(
2013年12月11日第599号命令,关于工业安全领域的联邦标准和规则的批准,“采矿和固体加工安全规则”矿物“” ,其中只写了一点:
要点:325在矿山中开采的运输车辆应配备防撞系统。 防撞系统应及时向驾驶员提供有关人员和车辆在车辆轨迹半径内的存在的通知。
EMESRT描述的防撞系统的初始要求要大得多,并且在产品开发中要考虑这些要求,以满足所有现有和新的要求,将来可能会添加到俄罗斯采矿企业的相关文件和法规中。
因此,我们来到了设备和人员工作的关键场景,在该场景中,防撞系统应确定危险并在这种情况下警告所有参与者。
挖掘方案清单:- P1-Man直接位于机器旁
- 在使用机械和设备时会监视P3-Man
- P4人坐在驾驶室内外
- L1站立式立式机器
- L2-与立式机器反转时接近机器
- L3反向移动时2辆汽车的调和
- 一级驾驶L4调动2辆车
- L5两辆汽车相互靠近的离开
- L6-两辆汽车向后移动,一辆超越另一辆
- L7调动2辆行驶的汽车并超车其中一辆
- L8零可见度方法
- 沿道路弯角行驶时可见性不足的2辆汽车的C1-调车相遇
- C3-在可见度不足的弯曲条件下接近车辆并向后移动
- 在交叉路口以相同方向行驶的2辆汽车的T1-进近
- T2:两辆汽车相互贴近,意在其中一辆汽车的交汇处转弯
- T3-以90度角在T形交点处向同一方向移动的2辆汽车的近距行驶
- T4-在2条技术道路的交叉点以相同方向行驶的2辆汽车的调速
- 带有旋转工作工具的R1-机器可在另一台机器旁边工作
- R2-机器将物料重新装载到另一台机器上
- O1机接近固定结构,墙壁或固定设备
- V1-Magin进入禁止通行的禁区
- V4-机器移动无需操作员控制
- V6-机器在有大量其他汽车和人员的区域内移动,例如,车间
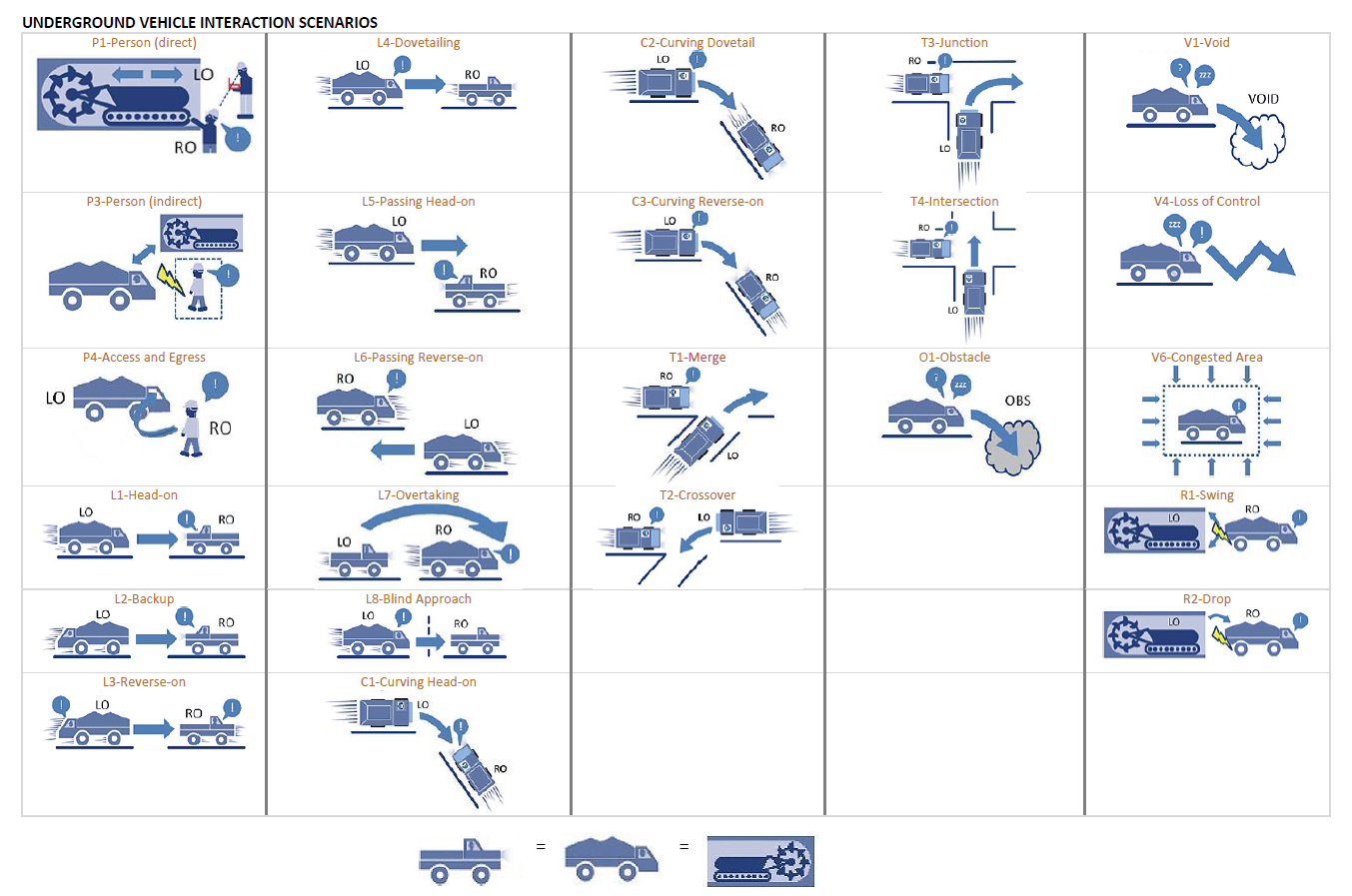
总共有24种情况,涵盖了地下采矿中解决的所有典型任务的99%,其中使用了自走式设备,运输工具并且可以有人在场。
接下来,我将告诉您如何选择用于开发产品的技术,创建产品时必须经历的事情以及在输出时发生的事情,以及如何测试上述每种情况。
创建防撞系统的技术和解决方案
自2016年以来,我们一直在开发这种避免碰撞的系统,您可以在
此处在哈布雷(Habré)上的文章中进行阅读。
在这段时间里,我们将技术从
原来的过时的
Nanoloc技术更改为更有希望的
UWB技术 。 我们在
这里和
这里都在Habré上写了有关UWB技术的更多信息。
UWB(UWB)技术用于定位对象的优势是什么?- 定位精度高:可达10厘米。
- 在直接可见度条件下抵抗无线电信号反射的能力。
到2018年,基于UWB技术的防撞系统已开发并经历了多个开发阶段。
看起来像第一个原型天线在开发的第一阶段,将天线板内置到用于特殊设备的手电筒中。 手电筒的闪光频率决定了个人标签位于哪个区域。

“ alt =” image“ />
测试新天线外壳的阶段之一天线外壳由重型绿色聚合物模制而成。 选择颜色是基于以下事实:不应在将要使用系统的环境中找到它。

现在,系统由以下组件组成:
 标签(TAG)
标签(TAG) -支持UWB技术的芯片,内置在矿工的手电筒中或基于该工具的单独设备中。
 天线(VBU)
天线(VBU) -安装在车辆的皮肤上。 它还包含一个UWB芯片,该芯片通过ToF(飞行时间)确定到另一个UWB芯片的距离。
 控制单元(VCU)
控制单元(VCU)是一台微型计算机,可以处理从天线接收到的测量值,并使用数学算法确定标签相对于车辆的位置,并将数据进行可视化处理后发送给驾驶员的显示屏。
 显示(VOD)
显示(VOD) -提供有关标签相对于汽车位置的信息的可视表示。
UWB定位技术的核心是爱尔兰公司Decawave的芯片。 这些芯片具有自己的天线,因此可以测量它们之间的信号传输时间。 由于同一UWB芯片与标签一样位于VBU中,因此它们在存在无线电可见性的情况下会相互检测,并在彼此之间进行测量。 该原理使您可以确定信号的传播时间,例如车辆的天线之间,以及天线与标签之间。
从这里我们得到两个控制区域:
- 运输车辆 (车辆到车辆或V2V)
- 运输人员 (车辆到人员,V2P)
系统原理
该系统基于在车辆周围创建3个危险接近控制区域的原理。 此外,这些区域可以是任何形状,并考虑到结构特征和车辆运动参数。
注意区警告工人附近有车辆,设备等。
该系统发出可能的危险进近信号,并允许驾驶员和矿工提请注意接近另一物体的事实。
天线(VBU)向UWB车辆周围的空间发射信号,以搜索无线电可见区中的其他天线(VBU)或个人标签(TAG)。
如果在“注意”区域中检测到其他天线(VBU)或个人标签(TAG),则将测量从天线(VBU)到物体的距离。
有关距离测量的数据将传输到控制单元(VCU),在该单元中,将计算检测到的物体在距离,方向和区域上的位置。
计算结果显示在驱动器显示屏(VOD)上。
危险地带它可以修复危险的和解并引起工人的注意;它可以减慢设备和运输的速度。
该系统会通知您可能发生的事故,并让您吸引驾驶员和矿工注意接近另一个物体的事实。
驾驶员在显示屏(VOD)上看到检测到的对象位于哪个区域,并且当其接近车辆时,该对象将从显示屏(VOD)上的“注意”区域移至“危险”区域。 同时,当物体进入“危险”区域时,车厢内将出现声音和声音通知(VOD),同时在驾驶室内和车辆外部均会打开闪烁的信标和声音警告。 同时,还会在员工的个人标签(TAG)或另一辆配备RealTrac防撞产品的车辆的驾驶室中打开声光警告。
碰撞区当另一个装有系统的对象进入“警报”区域时,它将生成警报。
当物体从“危险”区域进入“事故”区域时,将包括所有提醒驾驶员的方法。 驾驶员显示屏(VOD)上的红色危险信号点亮,并且持续发出声音警报。 矿工的个人标签(TAG)还包括声音警报和振动警报,以表明它们位于“事故区域”。
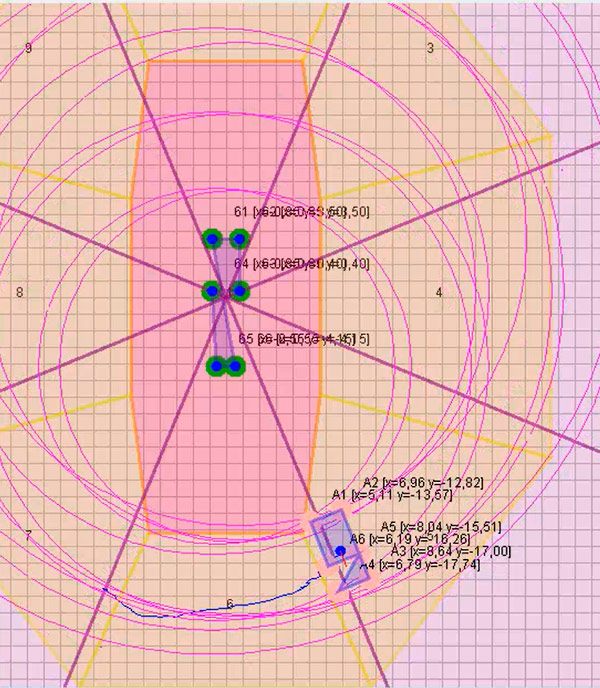
这就是防撞系统配置器中控制区的外观。 可以看到车辆上天线的安装点以及安装在另一辆车上的标签。 网格间距1 m。
这是理论上描述的系统原理。 我将在一周的第二部分中讲述这一切在实践中的外观。
如有疑问,请在评论中写。