NASA承包商发布的空缺表明,新型人形机器人的开发已经开始

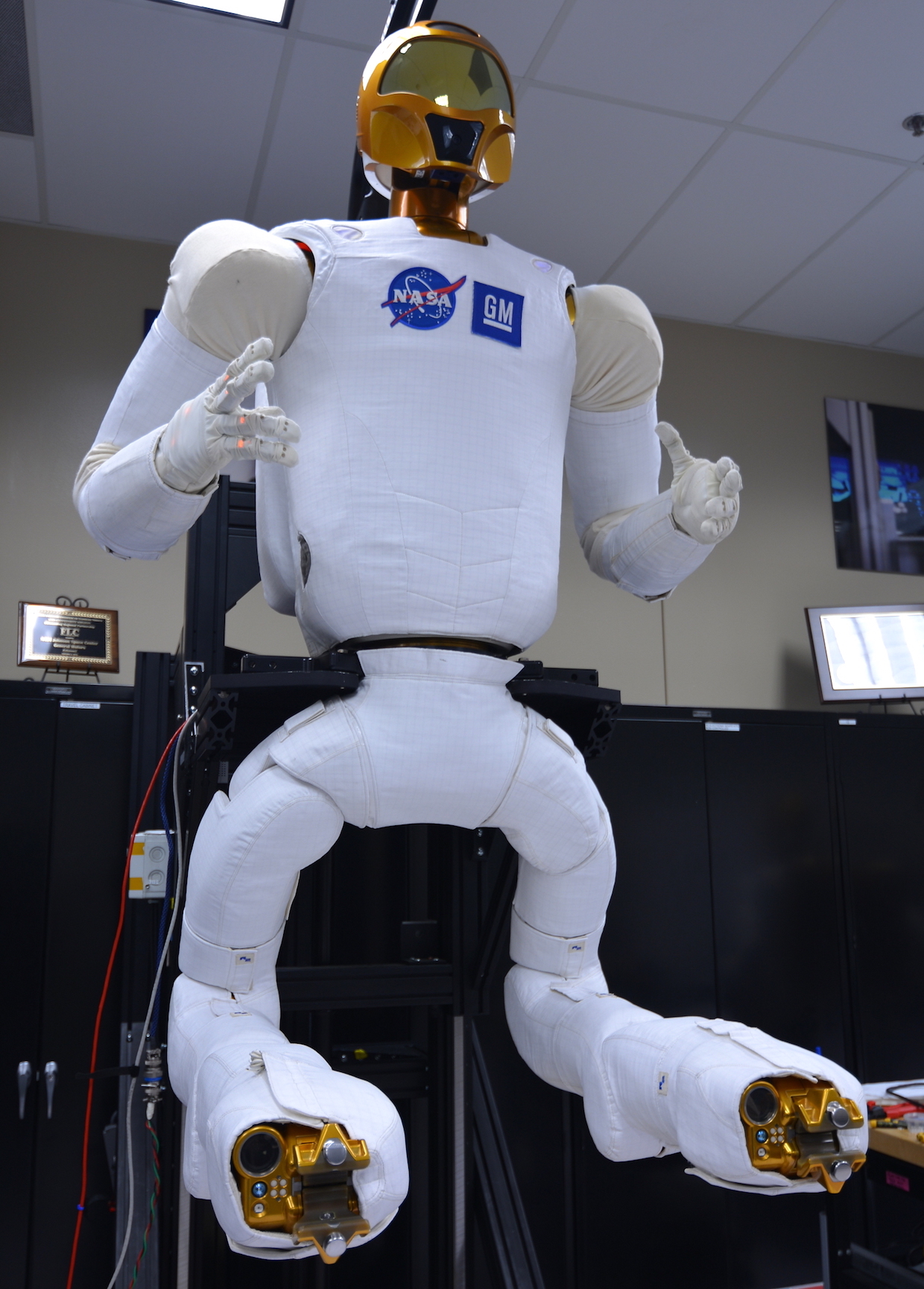
自NASA展示Valkyrie以来,已经过去了将近六年。 在DARPA机器人挑战赛结束时,NASA继续在Lyndon Johnson航天中心的Valkyrie上进行工作,并向几所大学提供了这些机器人的副本。 尽管不再认为该平台是新平台(在机器人技术领域,六年是一个不错的时光),但Valkyrie仍然具有强大的功能,并且在机器人技术领域仍具有巨大的研究潜力。
考虑到所有这些,我们惊讶地发现
,总部
位于达拉斯的工程公司
Jacobs为所有人提供了广泛的技术服务,该公司已经发布了德克萨斯州休斯顿的机器人技术职位的一些工作机会,这些人才对于有兴趣与NASA合作的“下一代”人来说人形机器人。”
这是
空缺之一的摘录:
- 直接在林登·约翰逊太空中心工作,以开发下一代人形机器人。
- 加入NASA机器人技术部门创建Valkyrie机器人的团队。
- 基于创造的类人机器人Valkyrie和Robonaut-2的成功经验 ,NASA扩展了引入人类存在的能力以及在复杂的,危险的和遥远的环境中(无论是在空间还是在地球上)引入物体的能力。
问题是为什么NASA再次进行人形机器人的开发,而不是使用现有的平台(Atlas,Digit,Valkyrie和其他或多或少可访问的人形机器人)节省大量时间和金钱? 我想到的唯一答案是,无论现有的平台如何,都无法满足NASA的要求。 如果是这样,有什么要求? 一个明显的要求是能够在NASA专门研究的环境(太空,月球和火星)中工作。
 艺术家展示的人形机器人“ Valkyrie”在火星上
艺术家展示的人形机器人“ Valkyrie”在火星上NASA的人形机器人(包括Robonaut-2和Valkyrie)被设计为在地球上工作。 结果,Robonaut-2还是去了太空(它最近被送回地球进行维修),但是,它的设备绝对不是用于国际空间站以外的工作的。 要在真空中工作,必须考虑到更严格的环境要求,在月球或火星上情况甚至更糟-研磨性灰尘会渗入到各处。
我们知道我们可以开发在这种环境下工作的机器人,因为我们已经成功了。 但是,如果您不打算将机器人送出行星,则确保它的可操作性是没有意义的,例如在月球发生300度温度下降的情况下。 过去,NASA专注于设计可以在将来用作开发软件和技术的平台的机器人,这些软件和技术有一天可以应用于地球以外的工作。 原子能机构没有在特定机器人的项目中进行过多的工程调查,以使它们可以在极有可能不会陷入的情况下工作。 但是,随着NASA越来越倾向于重返月球,也许是时候考虑创建一个可以在月球表面做些有用的事情的人形机器人了。
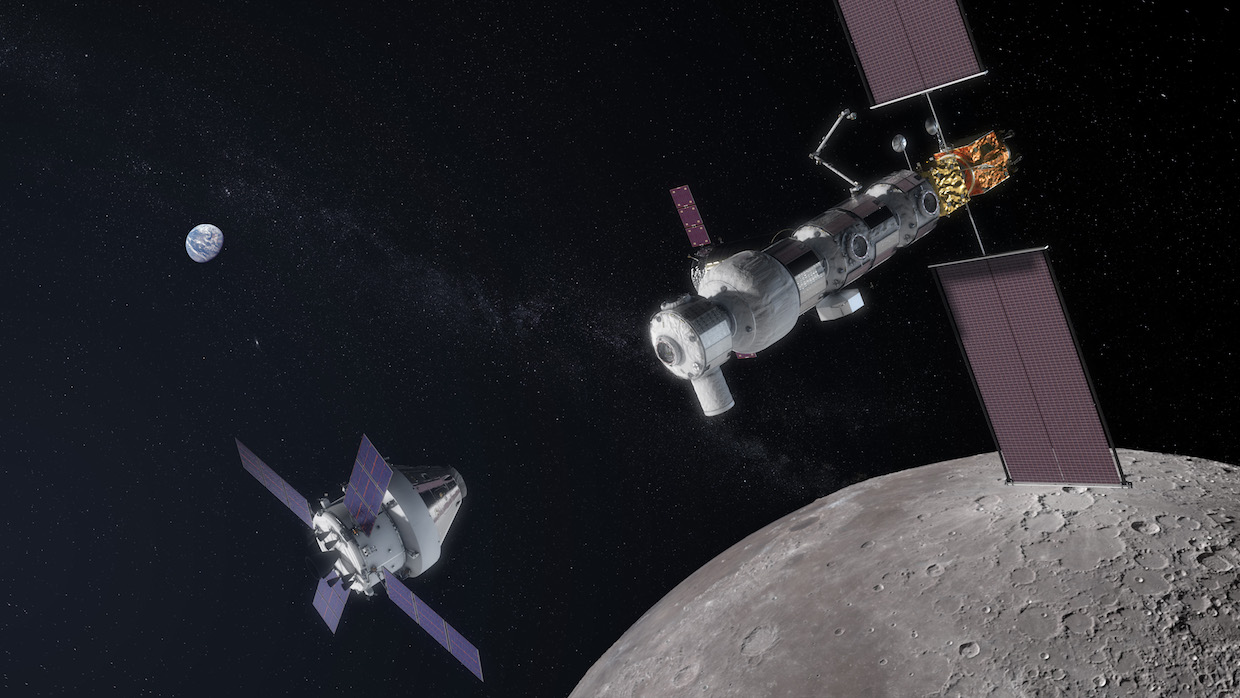 艺术家所展示的轨道登月站“ Gateway”(右)和接近它的Orion下降车
艺术家所展示的轨道登月站“ Gateway”(右)和接近它的Orion下降车我想到的另一种可能性,也许是更有可能的是,这种新型的人形机器人将成为Robonaut-2的直接后代,该机器人旨在在月球轨道运行的入口站工作。 我们最近与之交谈的某些NASA机器人技术强调了机器人技术对于网关工作的重要性:
艾姆斯研究中心的Trey Smith:在NASA,每个人都期待着将在绕月轨道运行的Gateway空间站工作。 对于网关站将要发生的事情,我们还没有确切的计划,但是,总的来说,每个人都同意在空间站内工作的机器人非常重要。 因此,在“网关”上看到“机器人”型移动机械手或诸如Astrobee的自由移动机器人也就不足为奇了。
如果一艘无人货船停靠在装满天花板的“网关”上,并且此时“网关”上没有任何命令,那么在站台配备一个可以接收所有这些货物,拆开包装,取出所有东西的机器人将非常有用。然后在团队到达之前取消货船的停靠,这样团队成员就不必花时间在此上了。
朱莉娅·巴杰(Julia Badger),美国国家航空航天局(NASA),JSC:网关站上存在的系统之一将是站台机器人。 它们不一定与Robonaut相似,但是它们的功能将相似-它们将是可移动的,它们将能够在不同的模块之间承载负载,对对象执行复杂的操作,检查面板的内部以及类似的东西。
 人形机器人“女武神”在“网关”站工作(艺术家的表演)
人形机器人“女武神”在“网关”站工作(艺术家的表演)由于人们不会一直在网关站,因此确保机器人始终存在很重要,这样在没人在家的时候,所有东西都可以在站内正常工作,同时以不吃东西,不喝酒,不消耗氧气的理由节省资源,不需要特别高的温度,并且不会散发出任何讨厌的废物。 显然,机器人不会像一个人那样有能力,但是如果它至少能够解决维修站的基本任务(很可能要归功于至少部分的远程控制),那么它将在这里非常有用。
 NASA的Robonaut团队计划使用可以抓住国际空间站上的扶手的新型机器人腿来计划各种机动性和运动计划实验
NASA的Robonaut团队计划使用可以抓住国际空间站上的扶手的新型机器人腿来计划各种机动性和运动计划实验为“网关”开发的机器人是否会归入“类人动物”类别这一问题与“网关”是为人类设计的事实有关,因此有效的机器人系统将必须与人机交互,就像人类会做的那样。 因此,我们应该期望机器人具有双手,其末端的工作体可以抓住物体和按钮,以及一些用于四处走动的系统-带脚的Robonaut-2版本似乎是原型,但必须对其进行处理才能使其能够在空间 为此,有必要利用过去十年中在机器人技术和计算机技术方面的所有突破。
Spectrum IEEE杂志团队对这个项目的问题一直困扰着NASA,但是机构代表尚未准备就此情况发表评论,甚至还不确定该项目的存在。 本文中的所有内容仅是我们的推测(空缺本身,您可能需要考虑),我们可能在所有方面都错了。 一旦发现更多信息,我们一定会通知您。