对于那些想使自己的倒立摆的人来说,本文可以作为备忘单。 这是我经过多次修改后所遇到的问题,需要对理论进行简要的概述以了解如何稳定系统。
我为什么需要这个?
简而言之:我想扩展CNC机床,但是出了点问题...
全文从小我就想拥有自己的数控机床,因为 处理飞机模型时,您需要做很多小的重复细节。 首先,我买了现成的
DIY套件 ,然后决定增加它。 我玩了两个月,但机器仍然很小,工作区域只有18 x 10厘米,没有定位传感器。 我决定购买一个更大的导轨,装上限位开关,然后用步进电机将滑架安装在中间。 我花了半天时间做完了,但是您无法直奔梦想-对于大型CNC电脑,您需要使任务复杂化并将摆锤放在车架上,对我而言似乎很容易,但是我必须记住研究所的岁月并熟悉TAU。
尝试失败
该项目花了将近两年的反复试验,重新设计,等待细节和不完整的假期,所以那些希望重复的人节省了时间和精力,我认为有必要谈论不成功的决定。
- 陀螺仪(MPU6050)而不是编码器-基本上没有陀螺仪,但是传感器应该位于旋转的杆上,这会带来不可预测的效果,并且无法使杆绕轴滚动数次。
- 绝对编码器-如果是电位计,即使电线的移动(主要是由于arduino中的接触)也会在测量中引入噪声,但10位ADC仍然不够; 如果它是更昂贵的传感器,则通过串行接口进行读取,这会导致系统延迟,尤其是与步进电机结合使用时。
- 系统的刚性-在某个时候,我拿了一根铝管,末端带有负载,当车架振动时,其中开始产生强烈的振动,现在还不清楚我们要稳定哪个系统。 我们必须努力确保物理系统尽可能地接近模型。
- 摩擦-这种现象通常被忽略,与带小球的滑块的导轨相比,我尝试使用大的滑车轮和V型槽轮廓来减少这种现象,因为 滚动摩擦与半径成反比。
- 步进电机的使用-我花了很多时间试图走这条路线,简化公式(实际上,我们立即控制摆锤的加速度)和简化设计(如果我们假设电机不会跳过步距,我们会忘记导轨,电机编码器中的摩擦力)会产生误导。 ,但是...为了准确地控制速度,步骤之间的时间应为数十微秒,这意味着您可以忽略输出到控制台的状态。 没有反馈,您将无法确定电机没有错过任何步骤,并且速度确实是系统所考虑的。 我并不是说这是一个死胡同的解决方案,如果有人成功地使用步进电机来稳定摆锤,那么我将很高兴看到它。
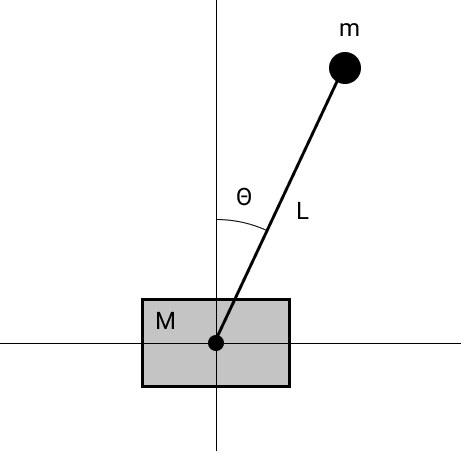
自由摆
为了使图片更完整,我们在无摩擦的自由托架上模拟了摆锤。
可以通过
相对于广义坐标微分
拉格朗日来获得运动方程。 我们得到以下方程式:
begincasesL cdot ddot theta+g cdotsin( theta)− ddotx cdotcos(th)=0(m+M) cdot ddotx+m cdot ddot theta cdotL cdotcos( theta)−m cdotL dot theta2 cdotsin( theta)=0\结束cases
从中可以找到状态向量的变化方式:
begincases dot theta=w dotw= fracg cdotsin( theta)+b cdotL cdotw2 cdotsin( theta) cdotcos( theta)L cdot(1+b cdotcos2( theta))\点x=v\点v=b cdot fracL cdotw2 cdotsin( theta)−g cdotsin( theta) cdotcos( theta)1+b cdotcos2( theta) endcases,b= fracmM+m
并模拟系统。 代码在
这里 。
为什么系统不稳定?
常识和可视化告诉我们,摆锤本身将无法承受。 但是如何在数学上进行验证?
一般而言,线性化系统和解决方案如下:
dot mathbfx=A mathbfx, mathbfx(t)=eAt mathbfx(0)
矩阵幂的指数看起来更清晰,如果我们从特征向量转到坐标系,则矩阵
将是对角线(
D ),参展商将如下所示:
eDt=\开始bmatrixe lambda1t&0&\点&00&e lambda2t&\点&0 vdots& vdots& ddots& vdots0&0&\点&e lambdant\结尾bmatrix
现在可以看到,在存在特征值的情况下(
lambdai )的正实部,状态向量的相应分量将趋于无穷大,并且系统将崩溃。 以上内容适用于连续系统,
本视频讲座将介绍有关可持续性的更多信息。
检查是否存在倒立摆的情况。 我们在平衡位置附近线性化系统
theta=0,sin( theta)\大约 theta,cos( theta)\大约1,w2\大约0 :
\开始bmatrix\点 theta\点\Ω\点x\点v\结束bmatrix=\开始bmatrix0&1&0&0 fracgL(1+b) theta&0&0&00&0&0&1−g fracb1+b theta&0&0&0\结束bmatrix\开始bmatrix theta omegaxv\结束bmatrix
非零特征值的形式为
pm sqrt fracgL(1+b) ,因此我们确信不稳定。
添加反馈
现在,力量将作用在马车上
f ,等式之一可以用以下形式重写:
(m+M) cdot ddotx+m cdot ddot theta cdotL cdotcos( theta)−m cdotL dot theta2 cdotsin( theta)=f ,线性化系统将采用以下形式:
\开始bmatrix\点 theta\点\Ω\点x\点v\结束bmatrix=\开始bmatrix0&1&0&0 fracgL(1+b) theta&0&0&00&0&0&1−g fracb1+b theta&0&0&0\结束bmatrix\开始bmatrix theta omegaxv\结束bmatrix+\开始bmatrix0 frac1L frac12m+M0 frac12m+M endbmatrix cdotf
现在系统(
\点 mathbfx=A mathbfx+Bu )变得
可控 ,这可以通过检查矩阵的等级来验证
\开始{bmatrix} B && AB && A ^ 2B && A ^ 3B \结束{bmatrix} 等于状态向量的维数,即 4.为了使摆锤保持直立位置,我使用了线性二次状态控制器,即 控制(u或f)是状态向量的乘积
[ theta,\点 theta,x,\点x] 通过
最小化二次函数的参数向量来实现。 仿真代码在
这里 。

引擎控制
现在您需要控制直流电动机,它包含许多我不知道的参数,因此我将其用作“黑匣子”,由以下等式描述,并考虑了摩擦:
\开始cases dotx=v dotv=−a cdotv+b cdotU+c cdotsign(v) endcases
您可以
在此处阅读有关方程式推导和参数估计的
信息 。 下面,我给出了带电压的电动机的加速度曲线图,该曲线图取决于电压(实际上,PWM信号是从控制器输出的)和拟合曲线。

我还通过蛮力
代码找到了模型系数。
因此,控制器为我们提供了所需的加速度,并且从第二个方程式中,已知所有常数,即可找到电压。
将真实设备放在一起
现在,我们拥有收集和稳定摆锤的所有知识。 我使用以下铁:
- Arduino Mega 2560不是UNO,因为两个编码器需要4个引脚进行中断
- 摆锤编码器-OMRON E6B2-CWZ6C每转2500个脉冲-给我们一个角度,我们计算角速度,分辨率很高,因此有足够的有限差而无需平滑和平均
- 电机编码器-LPD3806-600BM-G5-24C每转600脉冲-给出滑架的位置,计算速度
- 带5:1变速箱的12V直流电动机
- 10Amp 5V-30V电机驱动器
因此,我们显式地测量摆的角度,滑架的位置,计算摆的角速度和滑架的速度-我们获得了完整的状态,我使用
此脚本找到了控制器参数。 出乎意料的是,一切都很快恢复了原样。 我对结果感到满意,它站立甚至可以盛放一杯!
Arduino的代码
在这里与youtube上的许多选项相比,可以改进的地方-这种摆锤很安静,因为PWM在听觉范围之外进行了调谐,并使用了塑料轮。
现在,这项任务看起来像是一项实验室工作:测量电动机的参数并找到调节器的系数,同时了解正在发生的事情。
接下来是什么?
我打算制作一个摆锤:摆一个秋千,摆脱一圈电线,用方便的连接器制作一个屏蔽罩,这样一来捐赠给某些学校或博物馆就不会感到羞耻。 如果有人想加入,我将很高兴有更多雄心勃勃的想法。
参考文献
感谢您的关注!