
在第一部分中,我讨论了该项目的概念。 在第二部分中,我们通过骨骼来分析MIRO机器人的设计(许多图片)。
首先,我要说谢谢大家在初次出版后的想法和支持! 建立联合项目支持格式需要花费一些时间。 因此,每个决定加入的人,这次都请您多给我一点-一切都会很快的!目录:
第1部分 ,
第2 部分 ,
第3 部分 ,
第4 部分 ,
第5部分 。
正如我在第一部分中提到的那样,旧的MIRO版本实际上没有使用3D打印机制造的塑料部件,并且几乎完全是通过激光切割由板材制成的。 使用丙烯酸和胶合板。 另外,只有一个-小派对的相对便宜。 好吧,产品本身的生产速度相对较高。 但是在手术过程中,我不得不放弃这种方法。 主要原因是由片状材料,紧固件组装的零件不准确,不可靠,并且带有一堆小配件,垫圈和锁的冗长组装。 整个结构缺乏令人愉悦的“被撞倒”的感觉。 是的,并且在形状和几何形状上有很多限制。 使用3D打印,一切都变得更加简单。
我对箱子设计的主要要求之一是确定了打印的简便性-如有可能,箱子的细节应在没有任何支持的情况下进行打印。 好吧,或者有一些非常简单的支持。 因此,一切都是诚实的-正如他们所说,我可以直接在我们便宜的ANET A6上打印出出色的机器人。
所有设计都在Autodesk Fusion 360中完成。
该机器人由许多身体部位组成,可以有条件地分为三组:
- 3D打印技术制成的零件组
- 通过激光切割技术制成的零件组
- 系列产品。
这里的约定是,这是最明显的零件制造方法。 但是没有人愿意在打印机上打印第二组的详细信息。
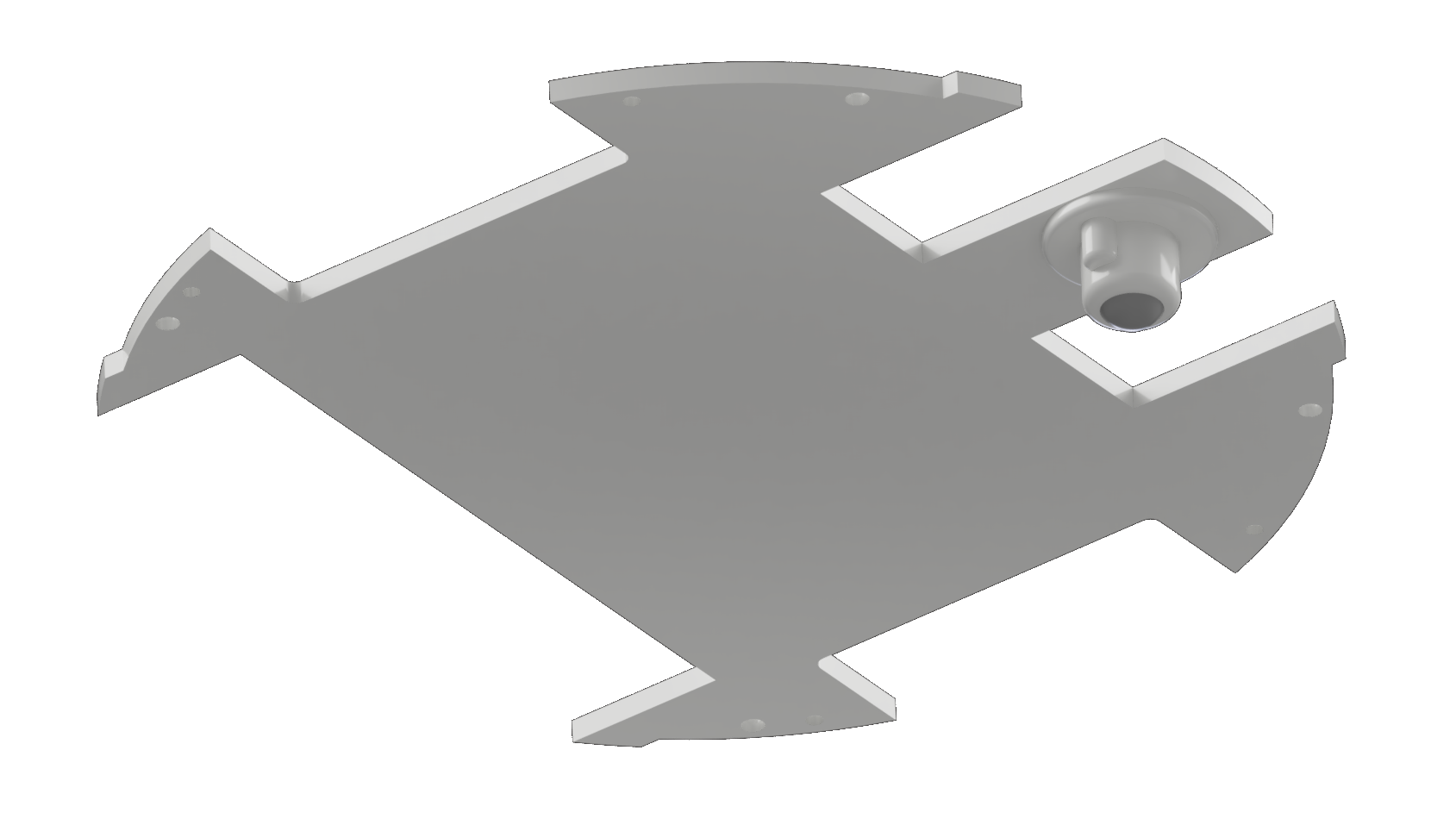
因此,机器人聚集在由4mm胶合板(第2组)制成的中央平台周围。 因为 在此部分中,有很多孔和槽,并且它是载体本身,不建议在生产中使用丙烯酸树脂-它非常易碎。
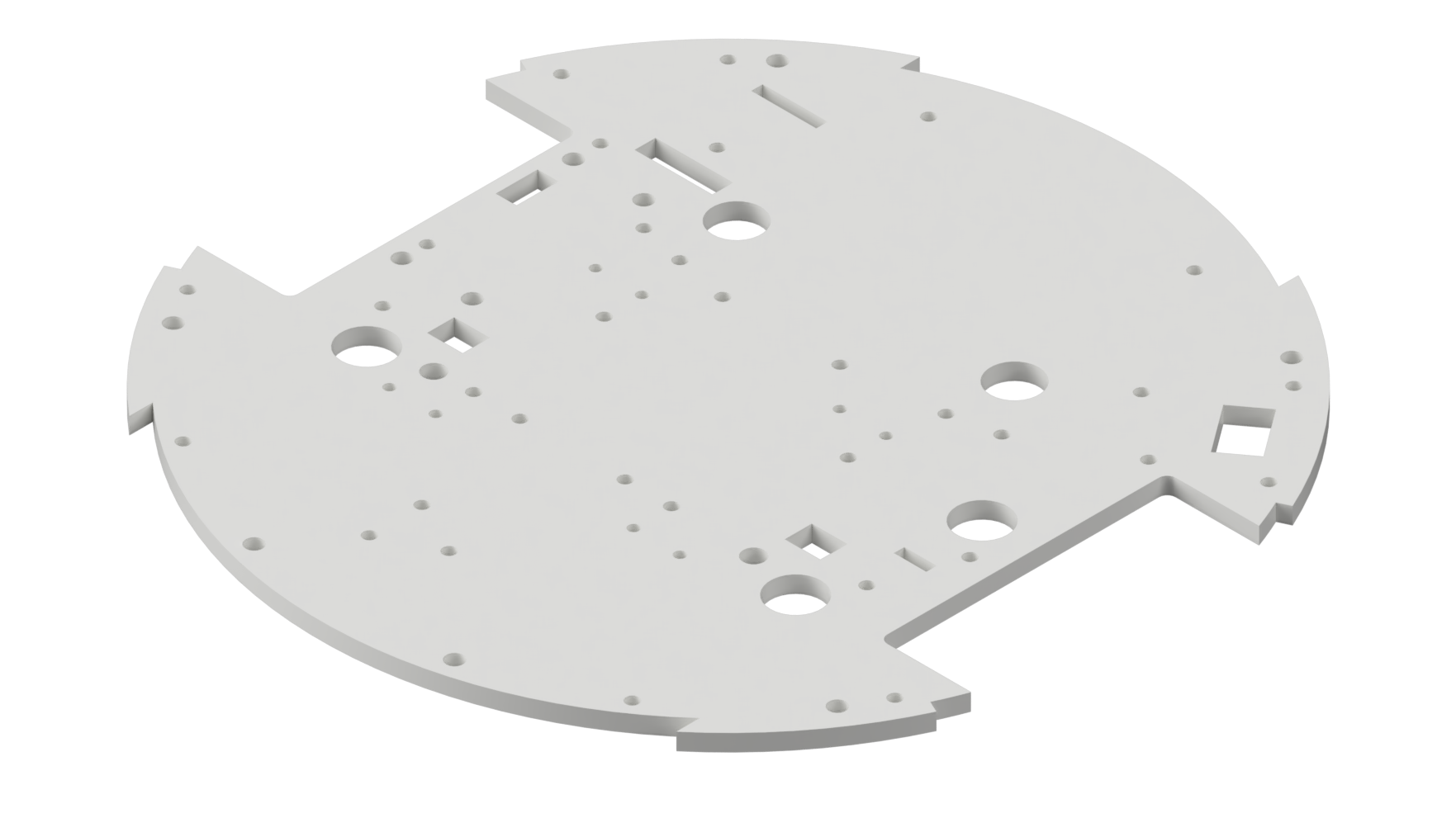
几乎所有零件都通过各种长度的螺栓和M3螺母互连。 并且仅对于安装板,您必须使用M2.5。 印刷零件上有用于“压紧”螺母的腔(紧密的饵)。
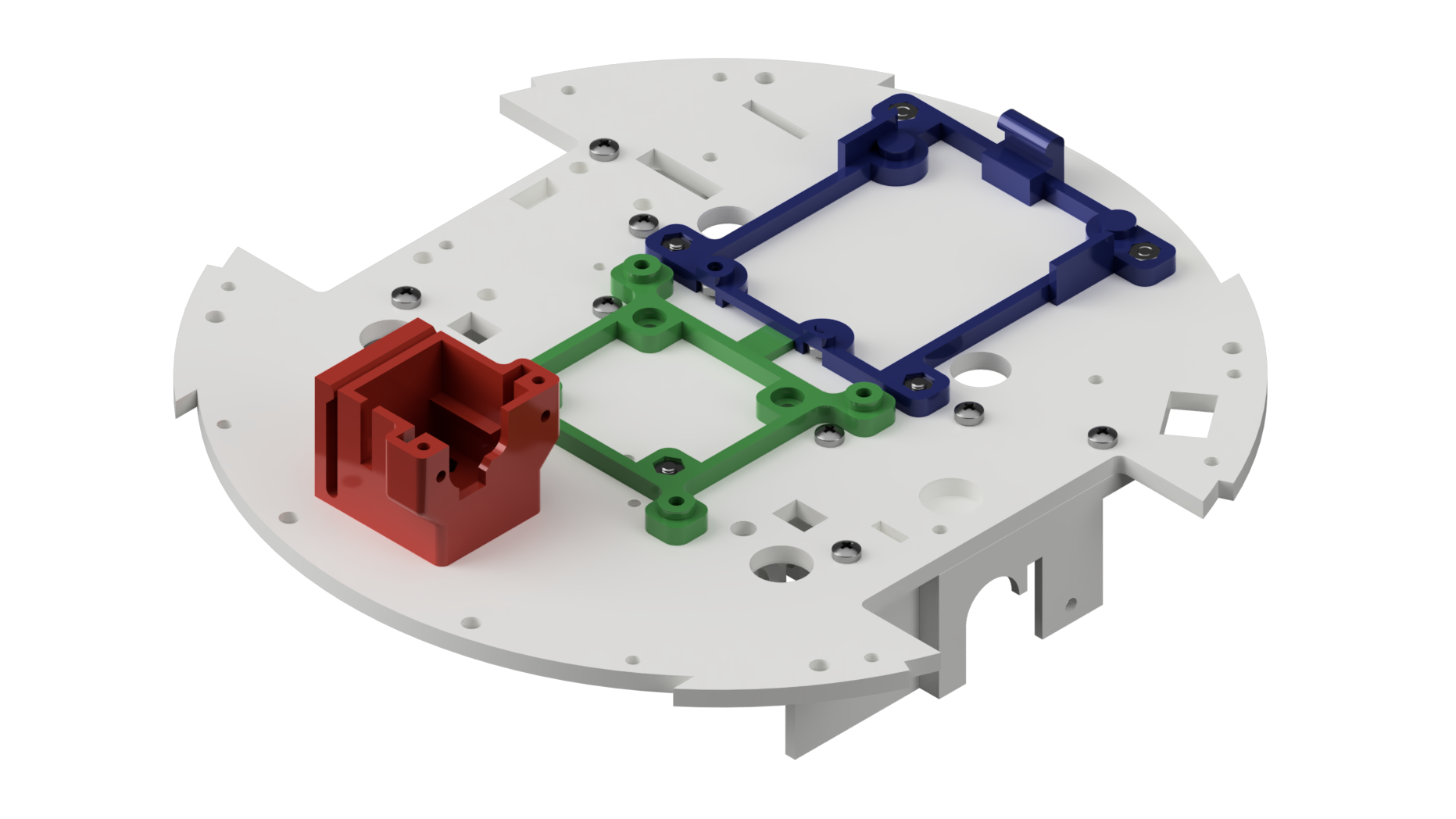
在平台的顶部连接了两个印刷电路板基板(第1组):ARDUINO和Raspberry Pi。
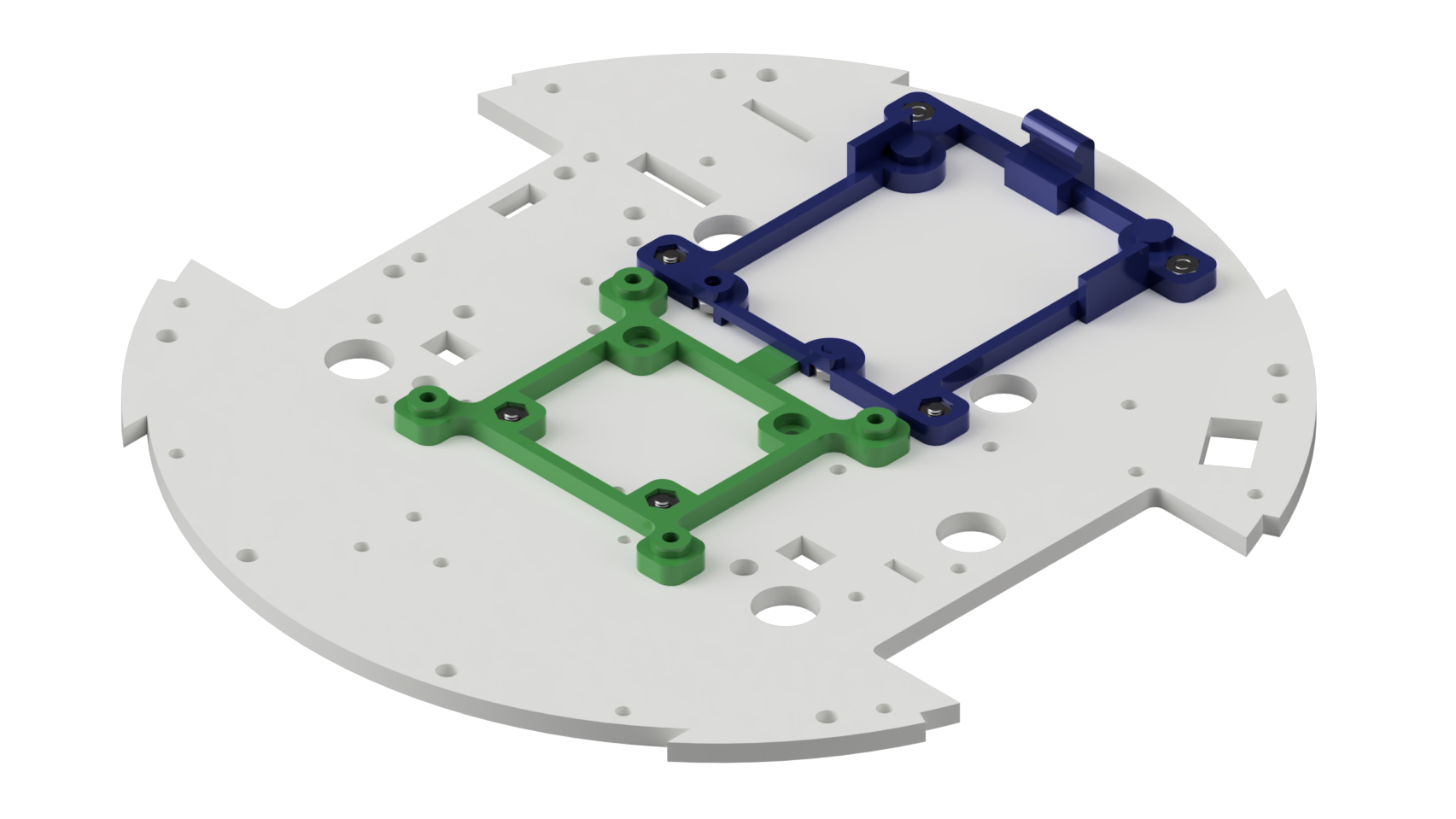
这些基板以及齿轮马达安装座中用于螺母的附加空腔,使您可以从机器人上卸下并更换任何控制器,电机驱动器,电压调节器-简而言之,只需卸下顶盖即可更换几乎所有机器人电子设备。
Raspberry Pi的基板的一侧固定在两个螺栓上,另一方面,在ARDUINO基板的基板下方的插槽中插入了一个凸耳。 从下方将螺母M2.5压入基板中,以便随后通过螺栓固定相应的板。
中央平台的底部是齿轮箱和光学槽编码器的安装支架(组1)。
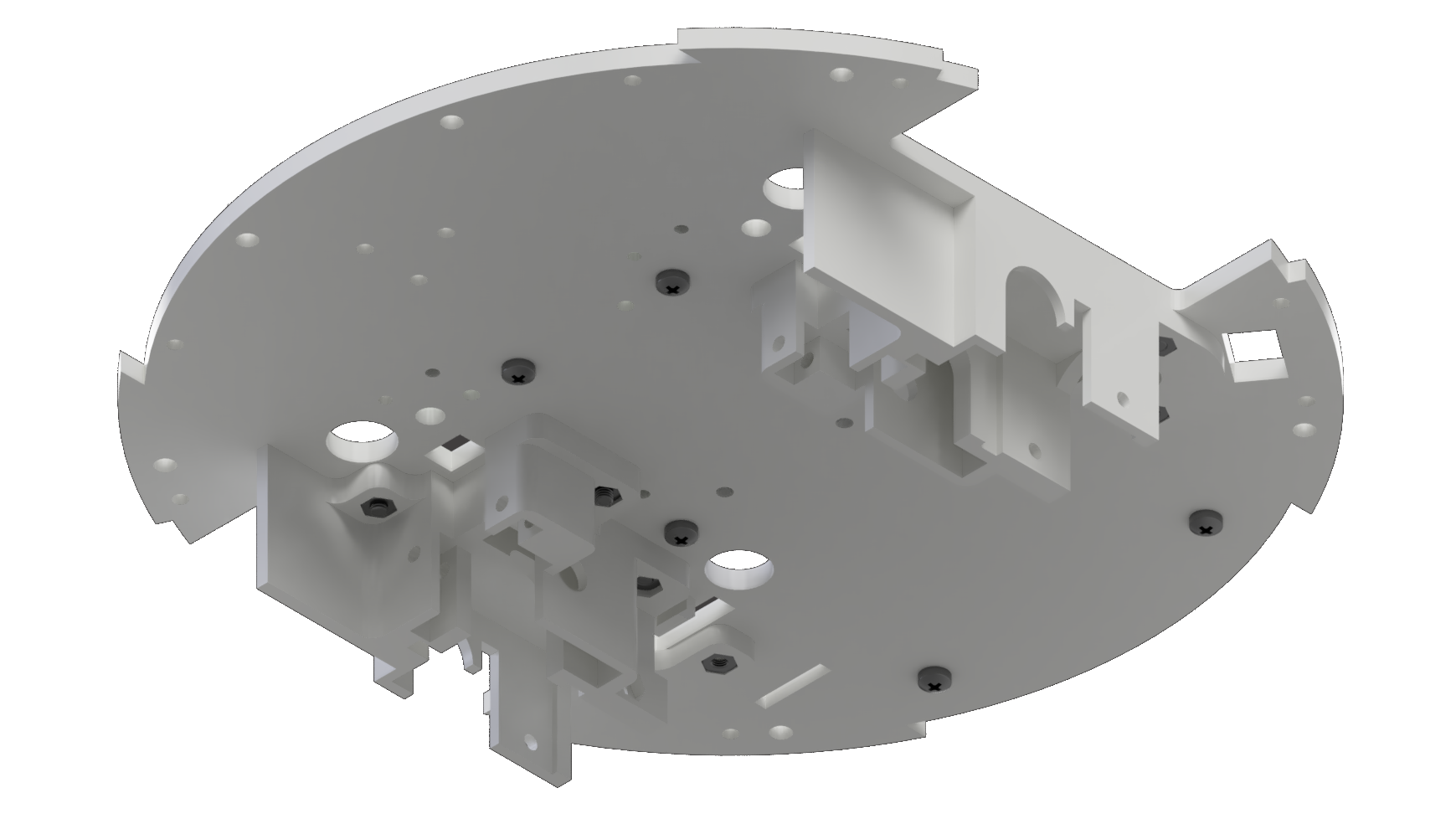
在三个螺栓的前面安装了组1的另一部分-伺服摄像机的支架。
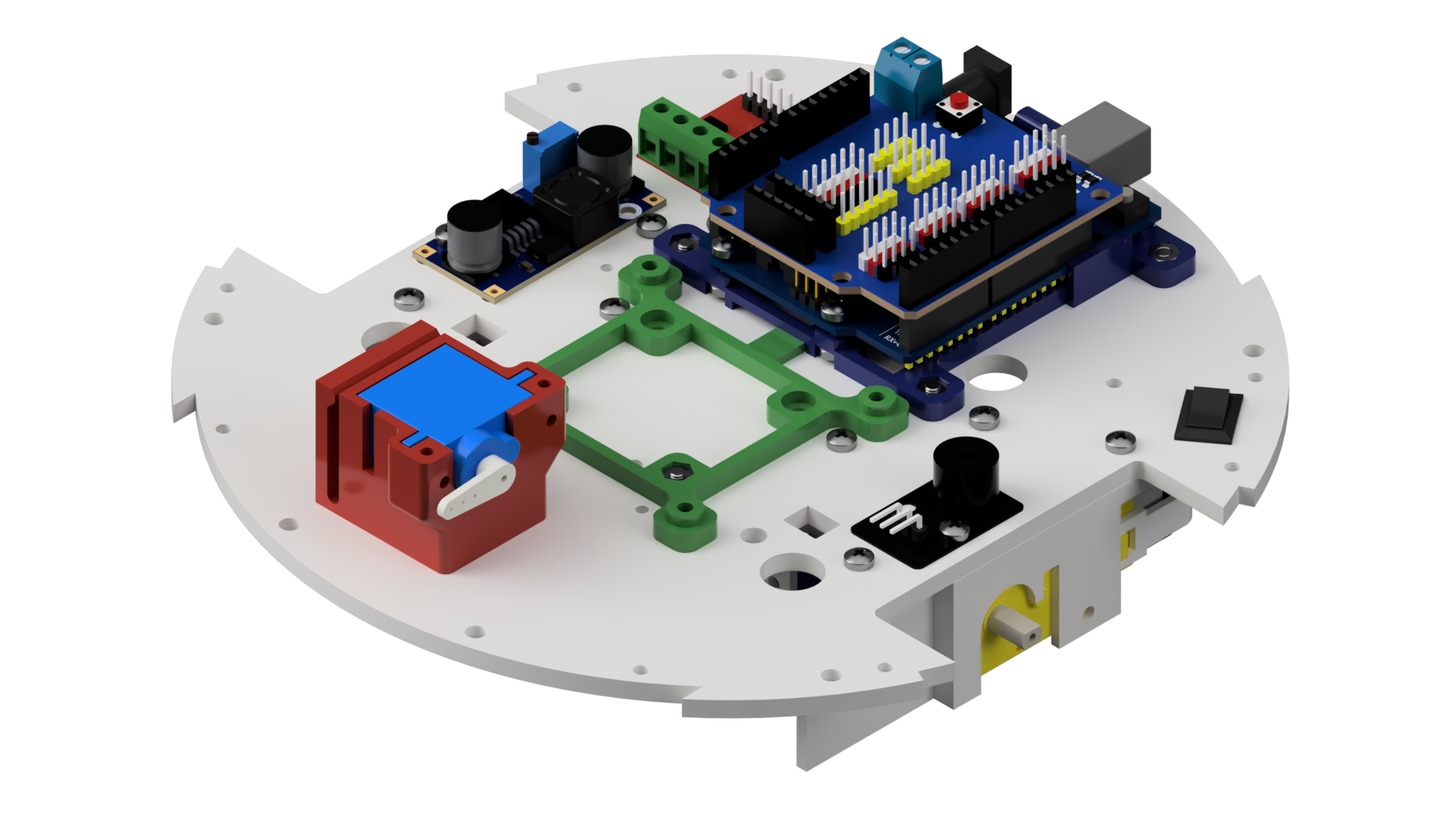
原则上,在此阶段,您可以开始安装电子设备。 Raspberry Pi板未显示在渲染中,因为它从项目中掉落到了某个地方,但它在绿色基板上。 扩展卡也显示为“某些”(如我在第一
篇文章中所述),“三明治”可以通过不同的方式执行(ARDUINO UNO和顶部带有ESP8266的扩展卡以及三针引脚连接器,或者ARDUINO + WiFi卡和扩展卡相似)图片中的那个)。
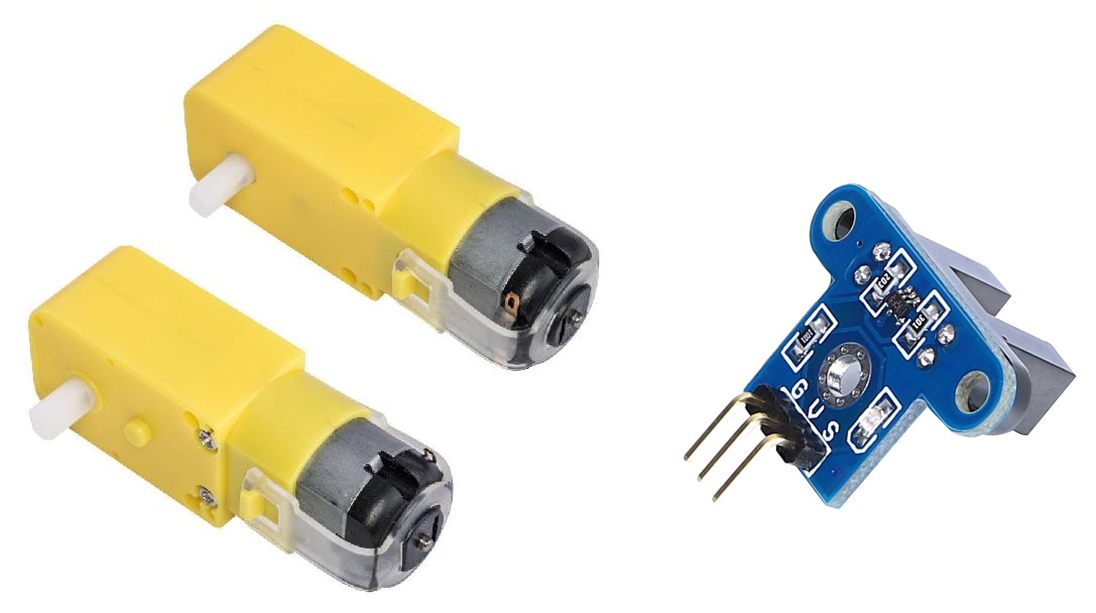
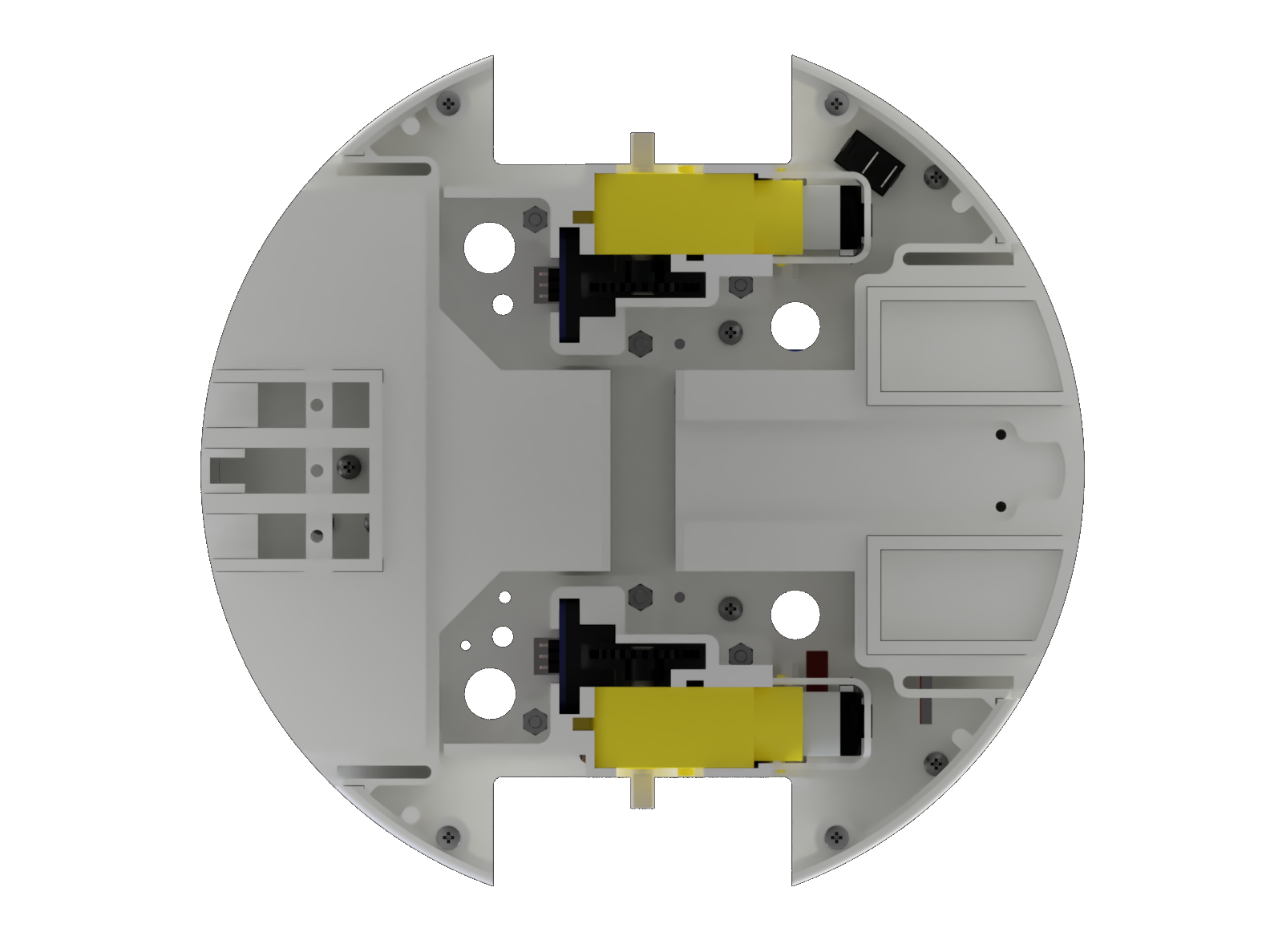
如您所见,MIRO使用通常的廉价“黄色”电动机。 这是项目机制中最令人恶心的折衷方案之一。 他们是不可靠的,他们很吵。 但是他们负担得起。 首先,通过任意角落的可用性。 另外,众所周知,开槽的编码器很容易在变速箱后交付给他们。 考虑到来自编码器的信号被简单又实惠的ATMEGA328中断的事实,这就是您所需要的。 一些带有编码器的电机直接安装到变速箱上。 通常,决定使用这些特定的电动机是一个痛苦的折衷。 但是在MIRO,我们竭尽所能略微改善了它们的运行性能-电动机安装座从各个侧面紧紧地抱住这些电动机,从而减少了中式轮组通常的车轮定位,并减少了由于齿轮箱刚度不足而造成的额外间隙。 如图所示,编码器只需插入电动机安装座印刷部分的凹槽中即可。
接下来,将外壳(组1)的壁的8个印刷部分附着到平台上:上方4个,下方4个。

从底部开始,所有物品都由一个盖(组2)封闭,一个后支撑轮通过一个转接器垫片(组1)安装在该盖中。 骑师轮-广泛使用的标准搜索“ 3PI N20通用球轮”。
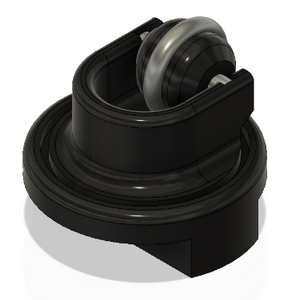
事实证明,一个相当大的问题是为小型机器人找到一个普通的支撑轮。 所有的滚珠轮都有一个减号-一个硬球,运动产生的所有振动都通过该硬球传递到机器人主体。 带轮毂的车轮也都是塑料的。 我们甚至为MIRO开发了我们自己的轮毂轮毂-带有标准尺寸O形圈的胎面。 但是他的项目尚未正常加载。 制造起来并不容易,因为它一次使用两个微型轴承。 它们很容易从中国定购,但是绝对没有现货。 但是,机器人的运动质量,该轮子的MIRO感觉完全不同-机器人可以轻柔地安静地运动。 谁访问了网站
mirorobot.ru ,他可能注意到项目中提到他的情况。
在机器人的左右两侧以及后面,使用塑料(1毫米)的薄塑料(1组)代替塑料印刷件(组2)。 为了将插件固定在外壳的壁上,有一些凹槽。 通过侧面插入件,可以很容易地到达Raspberry Pi USB连接器,并通过后部插入件,到达ARDUINO USB板(或ARDUINO + WiFi),而无需卸下上壳盖。

顶盖(组2)上有一个孔,用于安装榫眼手柄(组1)以搬运机器人。
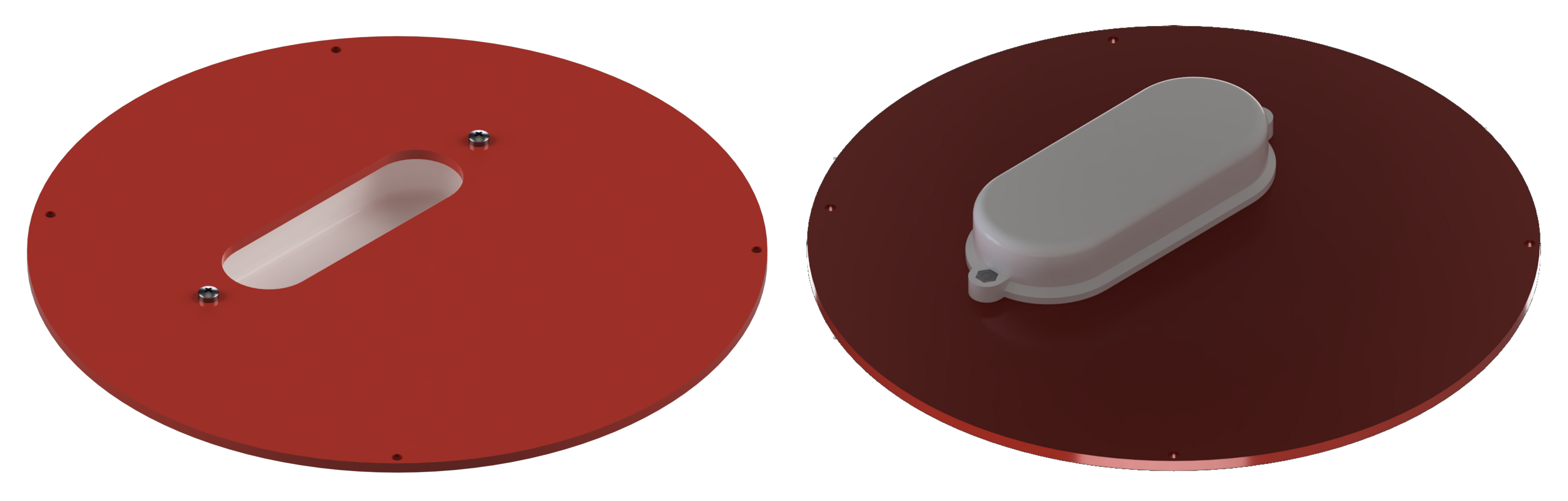
顶盖本身通过相同的螺栓连接安装在机器人上(请参见
第一张出版物的主图)。

机器人的驱动轮是使用3D打印技术制成的,与胎面一起使用,胎面是一个系列产品-直径65毫米的硅胶手镯(第3组)。 这是最常见的尺寸-如果您能在某种聚会上买到这样的手镯-则适合90%。 好吧,或者您可以在制造和销售各种品牌产品(“商户”)的广告公司中购买它。
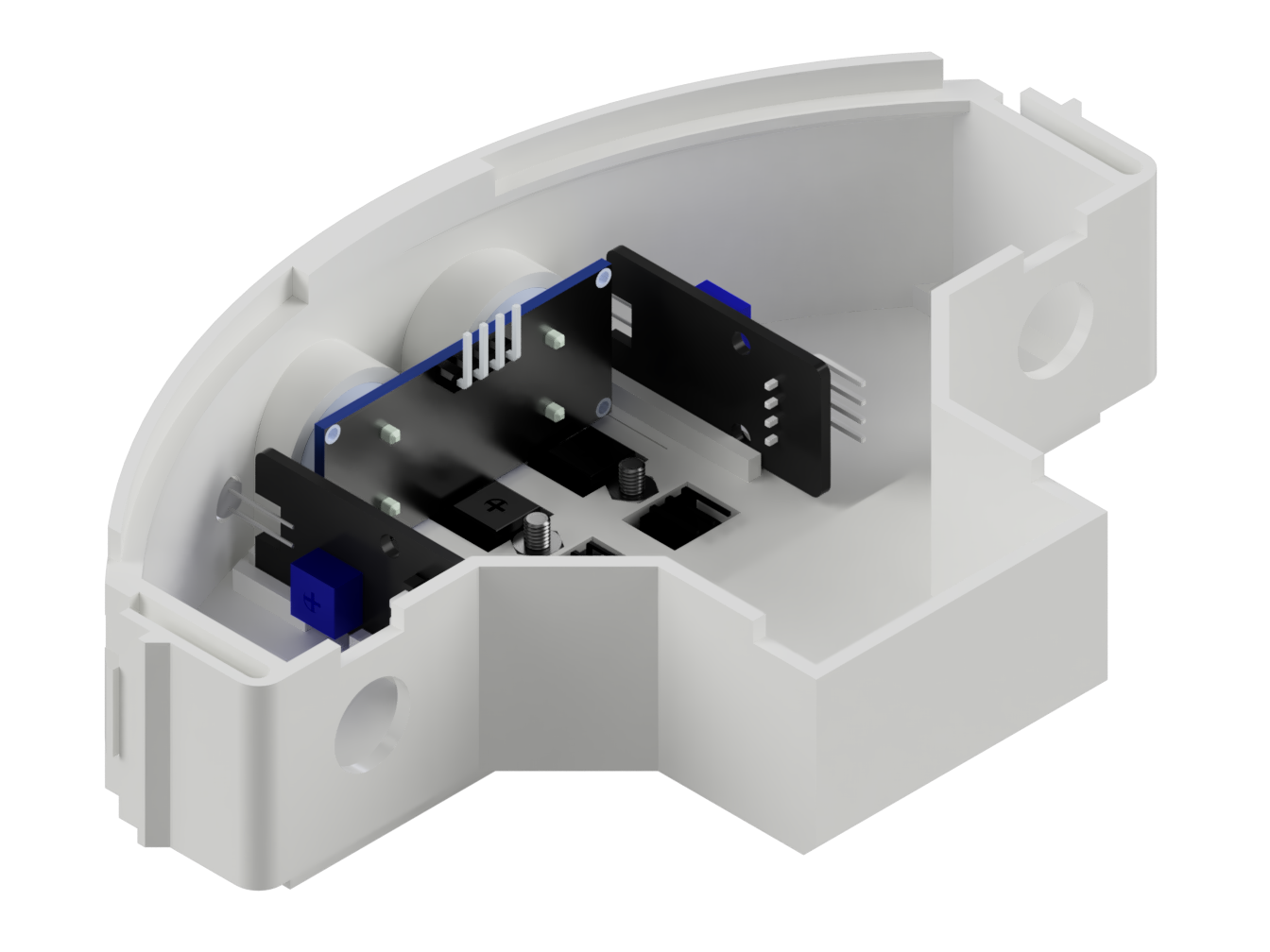
前后模块(组1)通过闩锁安装在机器人的前后。

这是前端模块SENS1的示例。
顶部的模块根本不会关闭-只需沿着底盖和中央平台之间的导轨插入即可。
为了方便拆卸,在壳体壁的细节上有用于手指的切口,因此可以方便地挤压闩锁并卸下模块。
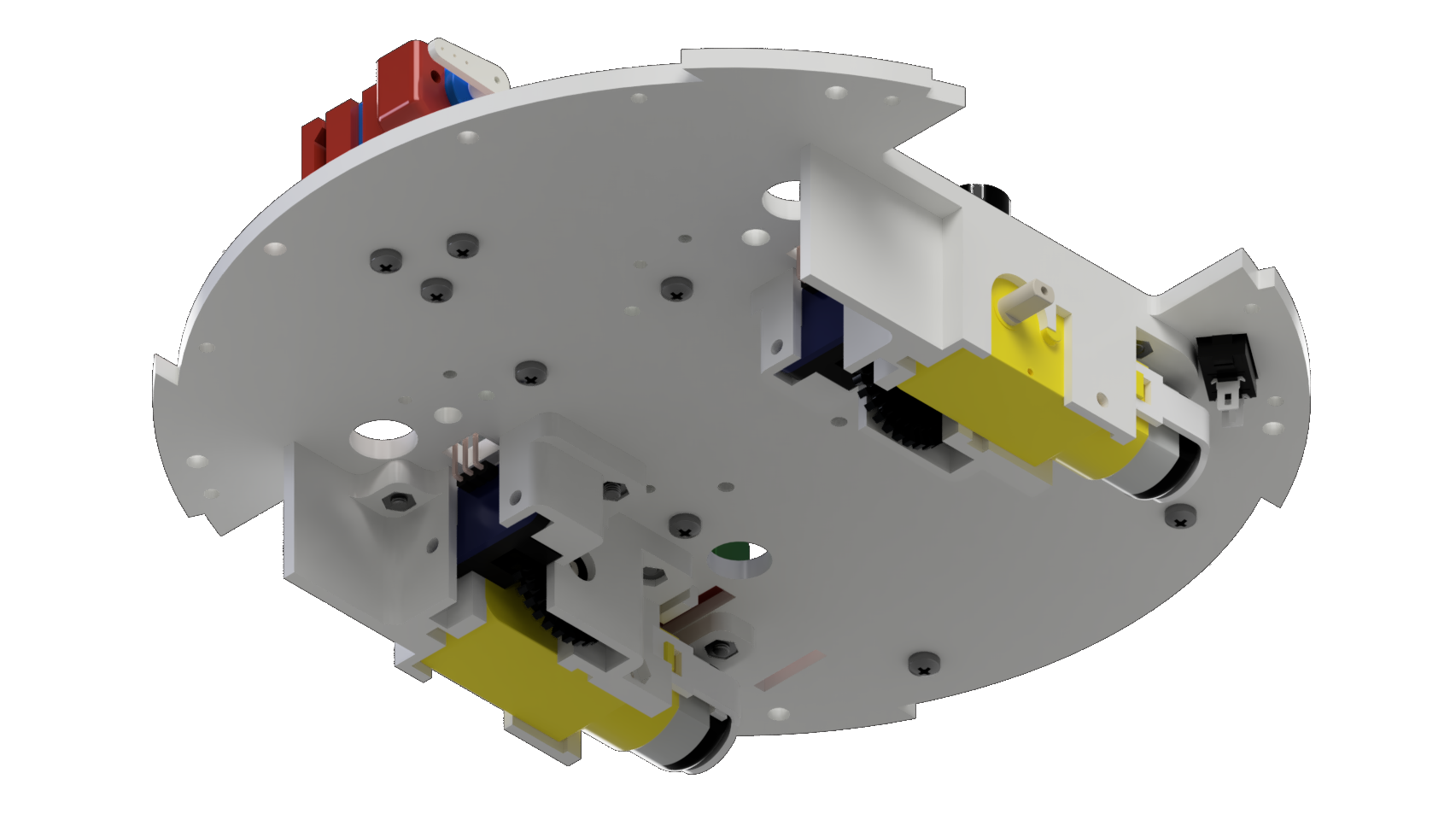
该图清楚地显示了卸下底盖后机器人中模块的位置。

电池位于后部模块中(现在是双18650,7.4V),但是已经决定略微增加2200-2500mAh锂电池的后部模块的深度(已选中-包括在内)。
机壳的左后壁上有一个供手指使用的孔(是的,是在食指下方),以使用电源拨动开关。 这个决定是有意识地做出的-我不想在机壳的盖子或外壁上做一个拨动开关,这很容易被意外切换。
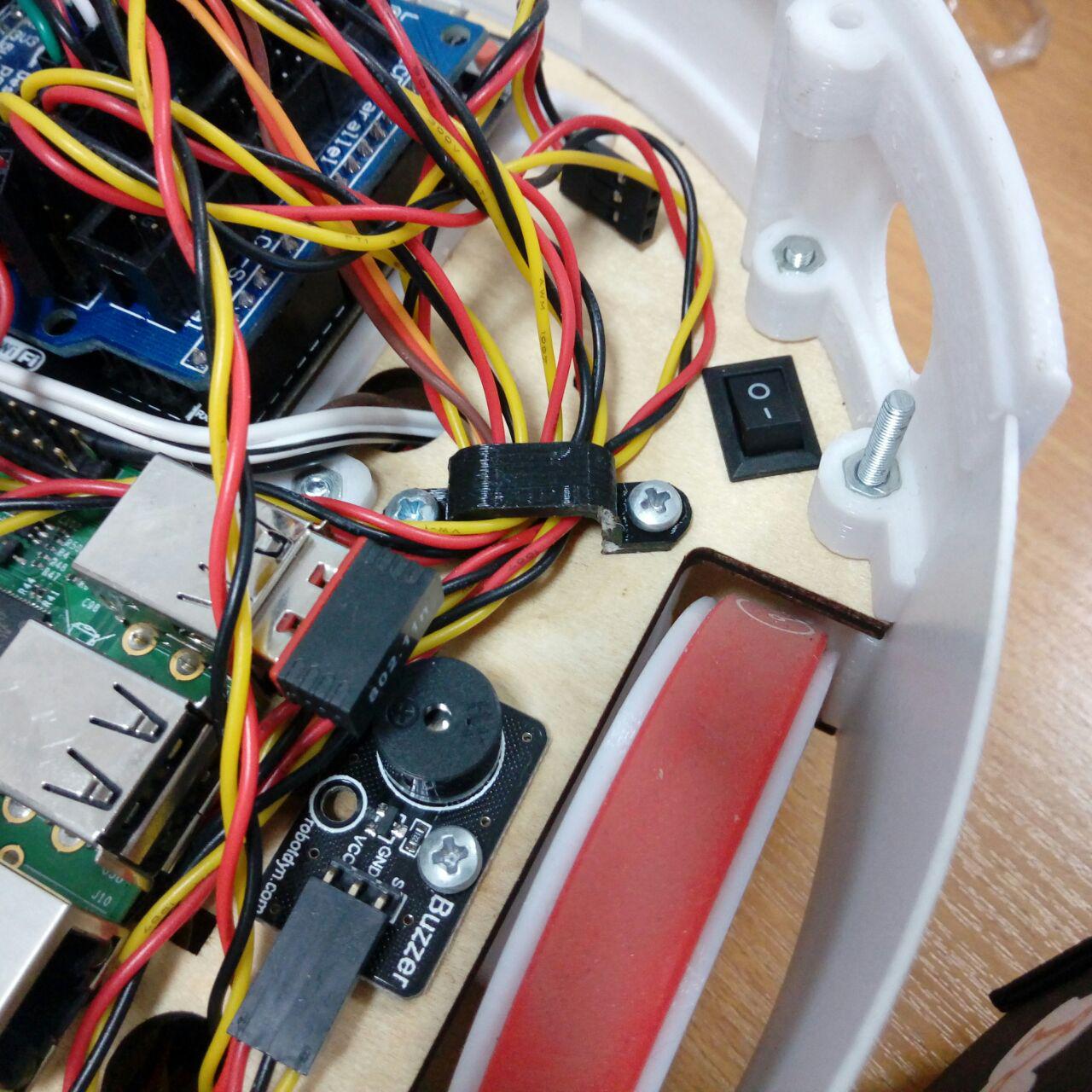
现在介绍任务(而不是问题,因为所有这些都已解决)。 首先,它没有显示在效果图中,但实际上,在机器人内部,电线杂乱无章(附有照片)。
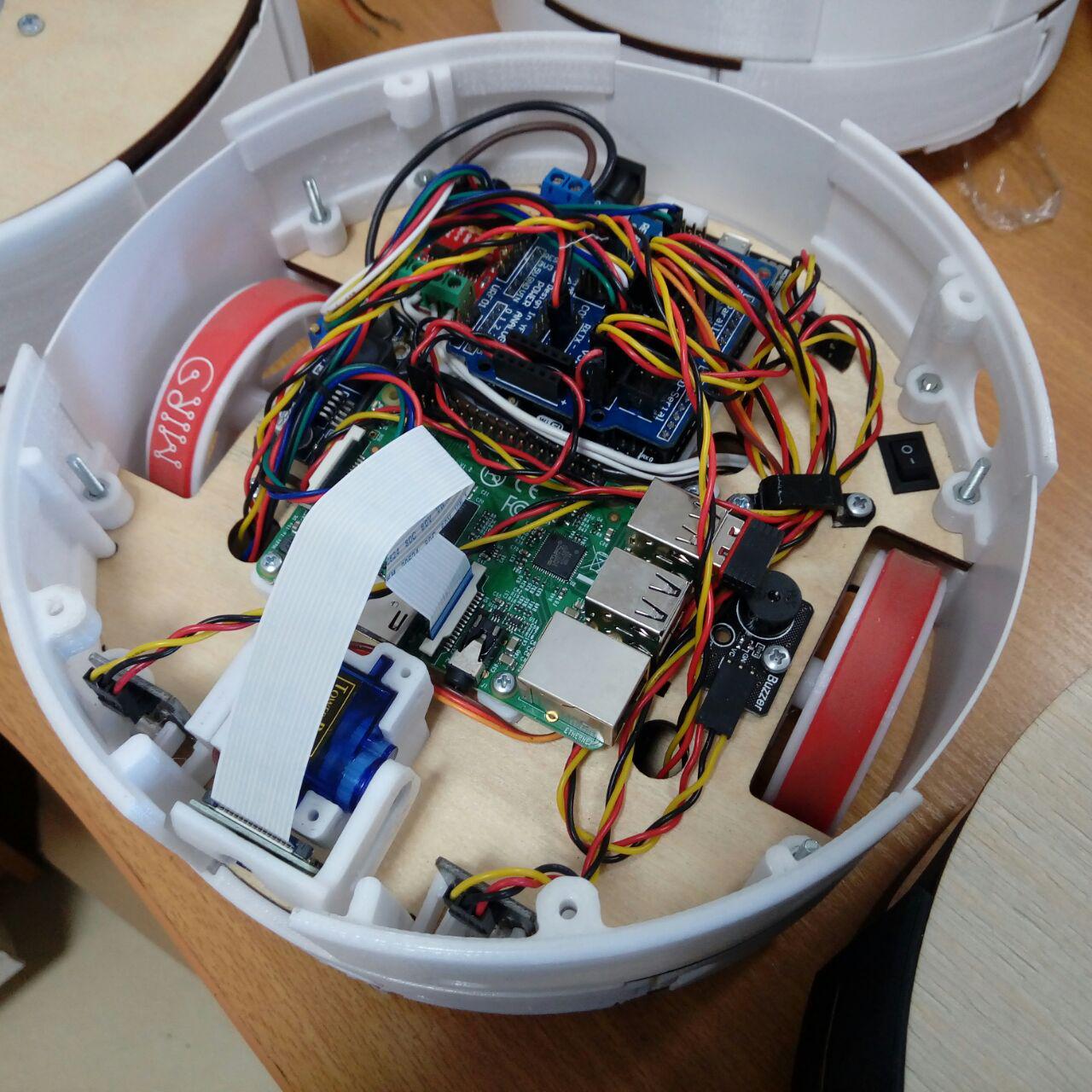
我们用右边的黑色夹子将它们局部整理一下,固定在用于安装左边电动机的相同孔中,但仍然很混乱。 我们需要处理这个。
其次,这是第一个任务,现在模块的连接非常差-电线流过中央平台和模块外壳中的技术孔,并且两端都固定在针式连接器上(对于后部模块,电池连接到电池板上的配对连接器上)电线)。 这肯定不漂亮。
在这里,就像您没有休息一样,但是唯一的解决方案本身就是-您需要自己的主板。 至少纯粹是为了在中央平台下转发模块的开关连接器的输出(在“父亲”箱内,“母亲”伸出模块)-以便模块是具有标准机械接口的完全隔离的单元。 在这里,我们计划这样做。 原则上,董事会肯定不会超过两层,因此每个人都可以在家中完成。 我们有一台机器。
六个月前,我正在制作一个视频,说明组装过程。 从那时起,设计发生了一些变化。 最重要的是,我们放弃了下部中央电池盒,因为它的位置没有有效填充后部模块,导致制动过程中机器人稳定性不足。 人体工程学略有改进,细节得到了简化。 但是其他根本性的变化没有做出。 因此,该视频很好地说明了机器人的设备。 而且新事物还不是优先考虑的事情,特别是因为Fusion 360中的动画引擎存在漏洞。
我预见到一个问题,为什么不立即将外壳的所有这些部分和中央平台作为一个整体部分打印出来? 这是一个困难的决定-为了使打印机的所有者能够制造长度和宽度小于205毫米的工作台的机器人。 机器人的直径仅为201毫米。 当然,今天,即使是最便宜的打印机,其工作台直径都在300毫米以下,但是用户使用的打印机很多,其打印面积要小得多。
但是在大型打印机上进行打印的详细信息已经准备就绪,并将在不久的将来发布-我们使用它们来制作用于铸造有机硅的主模型。
该
存储库还包含一组零件,这些零件以STL格式进行打印,层厚度为0.2 mm,带有准备好的可轻松移动的支架(STLwSUPPORTS文件夹)。 关闭切片机中的所有支撑,然后在正确的平面上打印。 如果有“正确”的平面,则将有助于确定文档MIRO PARTS LIST&MANUFACTURING(来自同一存储库),其中,所有零件均以等轴测图的方式从上方/侧面进行描绘,就好像它们位于打印台上一样。
好吧,我希望大致概述一下。 我省略了一些小东西,例如引导模块和相机支架的各个部分。 如果有奇怪的地方-写信,我会调整的。 好吧,建设性的讨论总是很高兴。
在下一部分中,我们将分析ESP8266端的软件。