我的故事是沉浸在对机器人技术的研究以及使用3D打印机创建机器人的过程中。 我遇到的错误以及我希望收到的错误
背景知识
大约10年前,在大学的第一门课程中,了解Arduino的存在并学习如何从中国订购商品,我为自己订购了Arduino Mega入门套件,并像其他所有人一样开始学习使LED闪烁。 我不仅可以在计算机屏幕上编程并获得一些解决方案,而且可以制造一些使生活更轻松的设备,这让我感到非常欣喜。 在了解这种概念之前,我就开始考虑物联网,并且我不时考虑实施此类有用的东西。 我认为自己完成的关于Arduino的第一个项目是带有蜘蛛的玻璃容器控制器。 屏幕,几个用于控制的按钮,温度和湿度传感器DHT11,背光自动控制,用培养箱加热线等。 我已经在学校有过与Pascal一起工作的经验,我喜欢编程,但是我不想直接与生活联系起来,这对我来说很无聊,显然我去了工程专业,或者去了NTU“ KhPI”的信息设计技术专业学习。 。
他们向他们承诺了一个超级先进的方向,先进的技术,告诉他们有多少这样的专家有需求,并吸引了Ansys,Solidworks和其他软件系统中的明亮计算图。 实际上,现在,即毕业6年后,我可以为自己选择这个方向感到遗憾。 当然,很多事情都不像入学时描述的那样,但是在第三年,我仍然在等待我喜欢的东西。 我对研究CAD系统感兴趣,在其中一届奥运会上,我获得了Solidworks的CSWA证书,一点也不费力,也没有为此做准备。 但是,毕业后,我收到了一份在编程方面没有经验和专门知识的报价,该职位是.NET开发人员在Solidworks中与插件集成相关的项目的职位。 然后在与不同方向的多家公司中使用.NET进行了6年的合作,尝试与加密货币进行远程合作等。 但这并没有带给我快乐。 我不时意识到自己喜欢日常流程的自动化流程,但是我想不出任何事情要做,不仅仅是玩游戏,而是真正有用的东西。 岁月流逝,大学持续了几年,没有空闲时间,但是在维修的前夜,我决定以这个机会运用我的知识并尝试做一些真正有用的事情,于是我开始开发智能家居。 他刷新了关于世界上微控制器当前状况的一些知识,了解了曾经有乌克兰初创公司Blynk的ESP8266板载Wifi的存在,这使得可以从手机获得有条件的免费应用程序来控制设备,而无需具备开发手机软件的经验和知识。 几个月后,我收到了一个组装在面包板上的原型,但是运行稳定。 第一次,为了进行测试,我以拧入配电箱中的模块形式将其留下。 我想写的是,在真实条件下进行测试后,我将电路板散布开了,并将所有组件组装得很好,但没有,这已经是第三年了,一切都稳定进行了,所以我不打算重做。 从对我有用的方面出发,我为每个人提供了自动节电的机会,其中包括夜间消费的主要消费者,例如锅炉,洗碗机和洗衣机。 监视每个房间中的温度,并相应地控制每个房间中的暖气。 在那里,他还为地板采暖和街道照明安装了一个控制器。 3年前,考虑到整个解决方案只需要一个普通的暖地板控制器,我的整个解决方案就花了我50美元左右。 整个系统运行了3年,使我充满信心,微控制器可以真正用于开发并且可以稳定运行。
首次尝试建造机器人
几年前,我仍然决定并通过购买3D打印机为业余爱好分配预算。 Ultimaker的胶合板克隆立即开始手工完成,门和丙烯酸盒也完成了用于打印ABS的工作,我开始理解,使用打印机,已经有可能开发出对我来说更严肃,可移动和有趣的产品。 我想起了从小时候在电视上播出的关于机器人之战的广播,然后我决定,为什么不让自己变得有趣。 我参加了机器人技术节,对这个想法更加着迷。 我开始用事物观看机器人项目,并意识到这是完全错误的,其他人的开发大多是乏味而普通的,缺少源代码,仍然是“ YAGENZHENER”。 我想要一些不寻常的机械装置,而不仅仅是轴距。 加载Solidworks时,我想实现一种类似于机器人的机制。
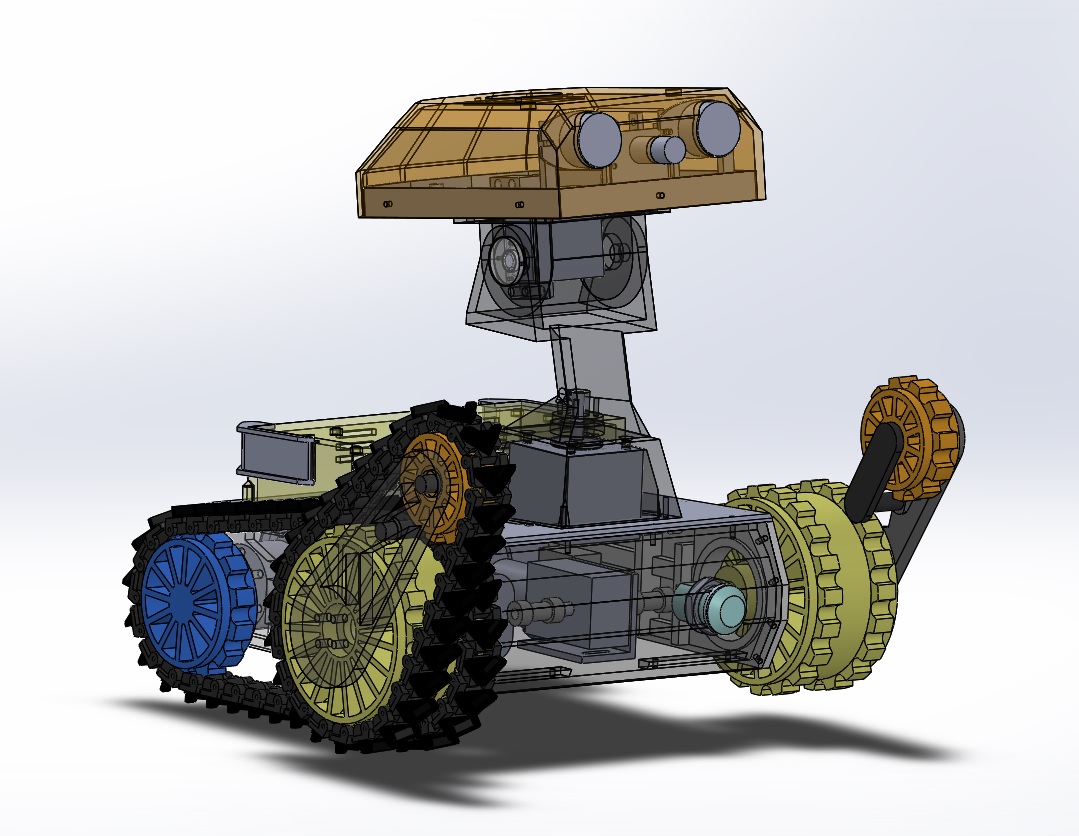
 成为启发者之一的同一台机器人
成为启发者之一的同一台机器人我查看了类似的设计,了解了工作原理,并牢记了做类似事情的想法。 第一个主要错误是决定一切都简单,我将逐步建模,打印和检查完成的设计,而不完全了解如何安排,如何安排,如何管理,使用哪些模块。 我有多错。 最初,我了解到该机器人将成为“外生”产品,我计划在该机器人上使用OpenCV进行各种对象识别,某种导航,自动停车收费,而您将不会在那里管理一个ESP。 最初的想法是使用ESP32进行机械操作,使用RaspberryPi3进行逻辑,摄像头,声音等操作。 对我来说,必要条件之一是自动充电,因此我必须弄清楚如何出售电力。 由于我在电子/电气工程方面没有太多经验,因此一开始我尝试使用类似Powerbank的功能以能够在UPS模式下工作。 当没有外部电源时,请使用电池(在我的情况下为18650的8个元件)工作;对相同的元件进行充电时,请在机器人停放进行充电时从市电工作。 总的来说,有很多尝试将所有东西放在一起并使其起作用,但是我意识到我需要学习材料或寻求帮助。 由于所有模块和电路板的不断变化,一切都不再适合机器人主体,在某个时候,我意识到现在是重做一切的时候了。
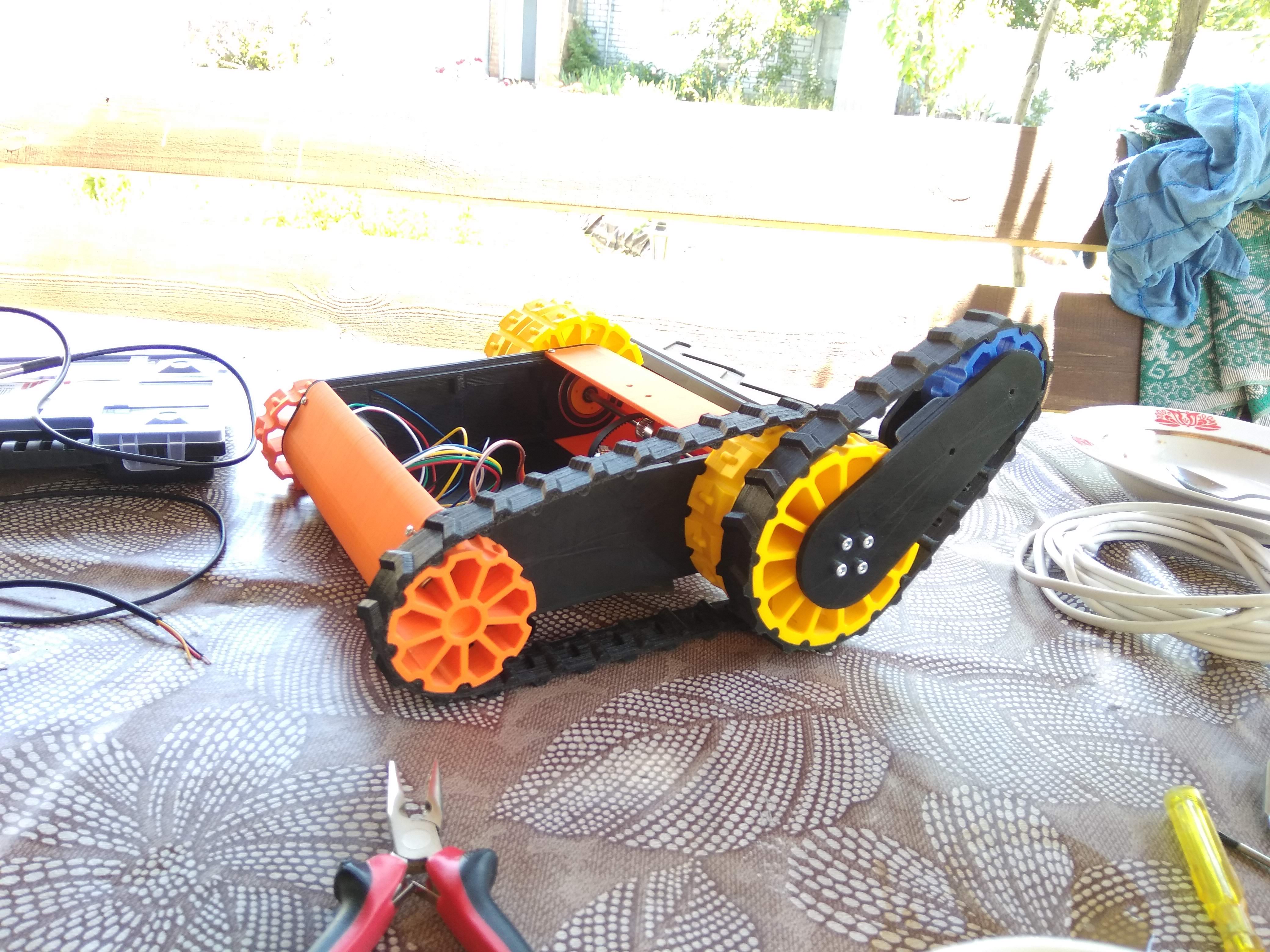 该设计的第一个版本带有带一条皮带的印刷轨道和一个用于旋转轨道前部的伺服器
该设计的第一个版本带有带一条皮带的印刷轨道和一个用于旋转轨道前部的伺服器错误的第一项工作
参加机器人技术网络研讨会后,我遇到了一个开发电路板的人,他自己决定,我可以更容易地草拟一些技术规格并从一个了解电路板设计和设备开发的人那里得到某种解决方案。 同时,我上次开始在新建筑物上工作,目的是查看我的门柱。 在这里,我再次踩着耙子走到了尽头,却不了解所有电子设备的外观,尺寸以及如何放置它们。 我们讨论了这将是一个模块化解决方案,我有一些板,例如引擎驱动器,电池,并且我开始重新模拟该项目,但是已经用安装孔,电线插座,散热器等完全画出了每个板。 以免再次遇到空间不足的问题。 实际上,我受到打印区域尺寸的限制,限制为200 * 200 * 200mm,我试图用一个零件制作出这种版本的表壳,这需要大约400 g的塑料和几天的印刷时间。
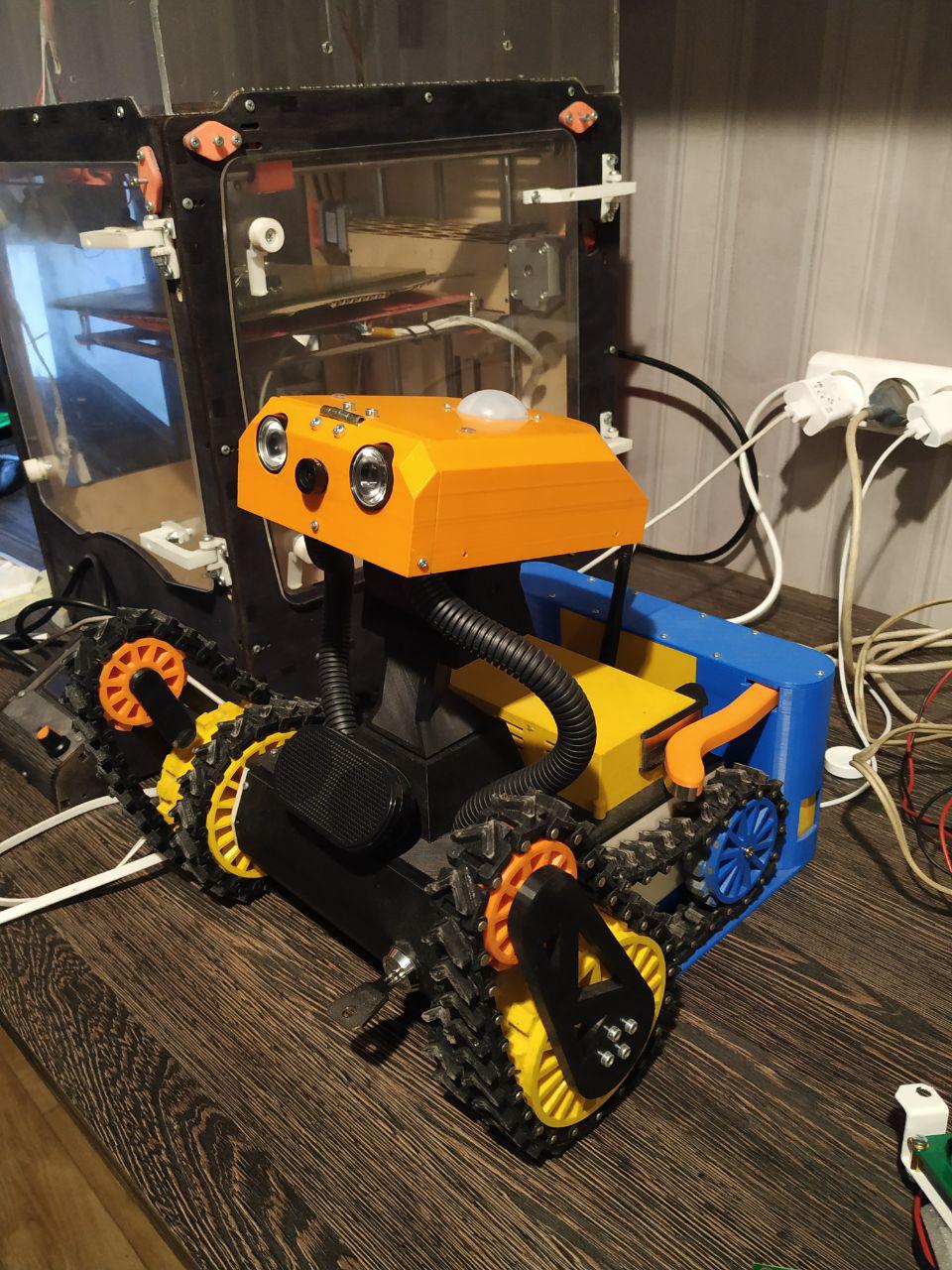
经过第二天的几次尝试后,从桌子上脱落的裂缝出现了,我意识到预制房屋并不是一个坏主意。 重做某些零件的过程将花费更少的时间,而打印机的麻烦将更少。 随着时间的流逝,我收到了一组带有我所有愿望的接线板后,我学会了与移位寄存器,多路复用器一起工作,并且至少以某种方式开始了解我难以理解的电路和设备。 到那时,我再次完全重做了力学。 他将前“爪”的旋转原理从伺服系统改为蜗轮蜗杆马达,他放弃了从橡胶状弹性纤维上印刷毛虫的皮带的想法,将其转换成组装在钉子上的普通预制塑料履带,并用弹性胶胎面胶在其上。 最初,人们考虑了一种通风系统,该通风系统从机器人后面从后面吸入空气,该通风系统穿过所有板子,管子,电线穿过这些管子穿入“头部”,并从中吹出热空气。 而且这个通风系统甚至在某个时间点都可以正常工作,但是随后又重新构建了所有内容,因此,对于我来说,通过一堆插槽和被动通风来打印封面很容易。
现在是什么
在第聂伯周末,举行了Interpipe TechFest技术节,我决定向人们展示我现在拥有的东西,听取别人的意见并与odnodumtsami交谈。 在那儿,我再次听说可以在某个地方写东西,例如在哈布雷(Habré)上,并从人们那里得到一些反馈。
实际上,对我来说,这是一个平台,在该平台上,我将学习与ROS一起使用,尝试在太空中导航,重建惩罚,尝试与固态激光雷达一起使用,而我正从kickstarter那里等待,我想拧一个像是真正的立体相机之类的东西。 我知道,覆盆子的大脑可能不足以适应我的需求,随着时间的流逝,我会转向功能更强大的产品。
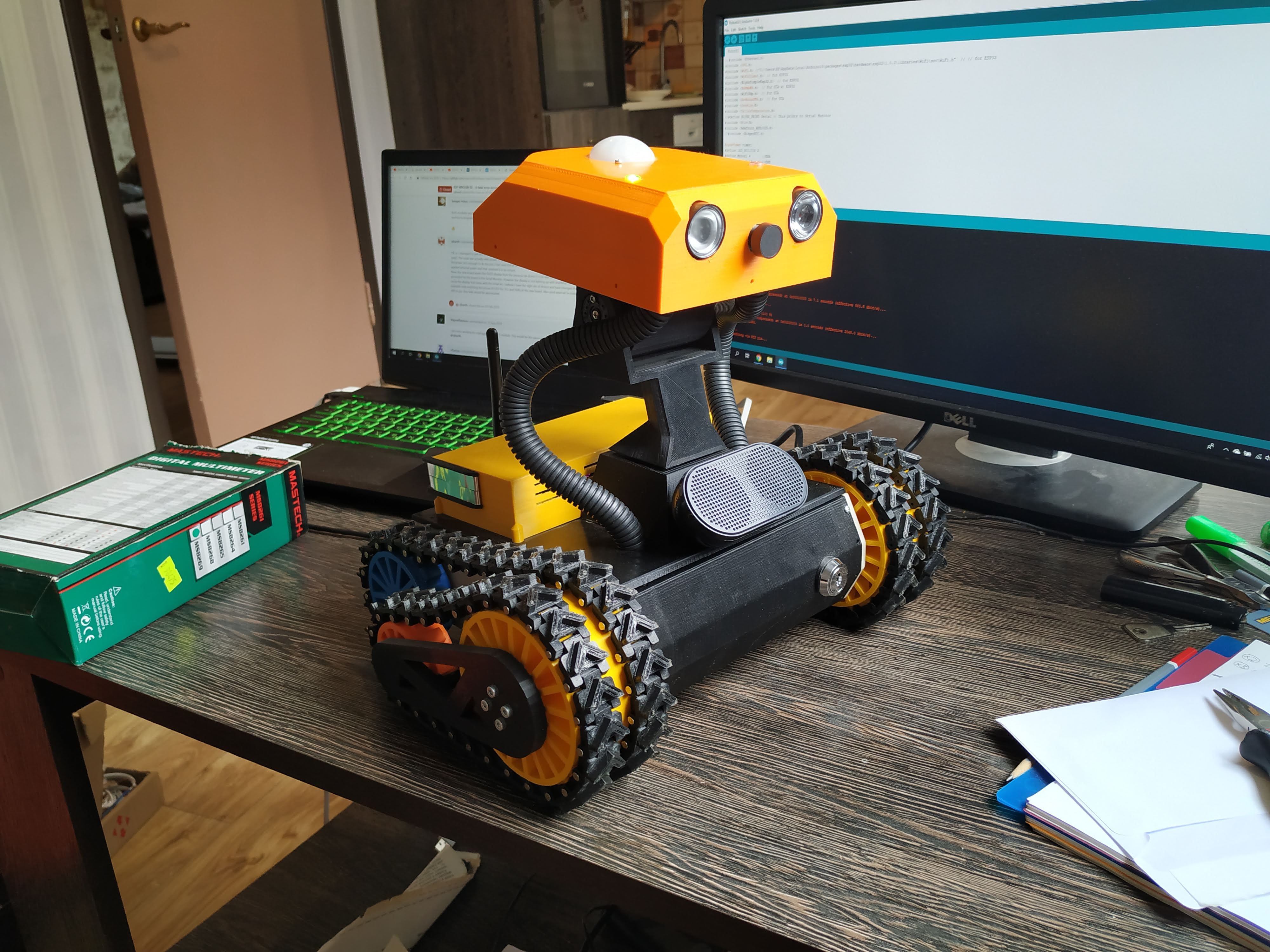
现在,该机器人可以用作“家庭看守人”。 而管理是通过所有相同的Blynk应用程序安排的。 它配备了球型运动传感器,具有打开/关闭红外滤镜和红外照明功能的摄像机。 从手机激活保护模式后,我在手机上收到通知。 我可以打开RaspberryPi 3,开始流式传输,流式传输+视频录制,拍摄发送到我的邮件的照片。 我可以去看看家里发生了什么,然后回到充电站。
18650模块自组装的4s2p电池每节3200mAh,使我可以在不打开所有设备的电源和传输视频的情况下充电约8小时,也没有进行任何节能优化。 到目前为止,还没有人动手。 机器人使用Google TextToSpeach在此应用程序的终端中进行写入,以读取文本。 这一切都来自我可以连接互联网的世界上任何地方。
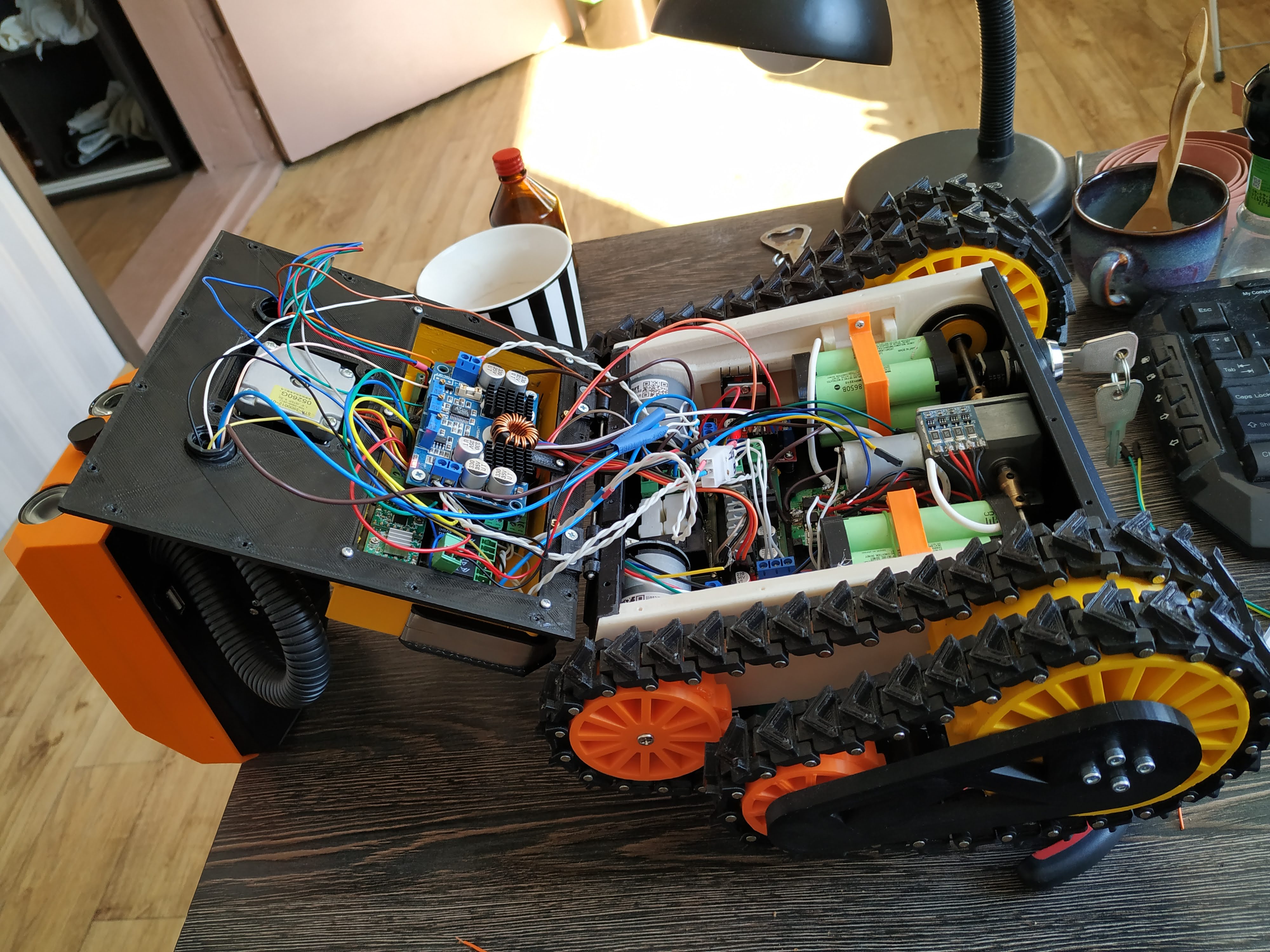 里面有一点锡
里面有一点锡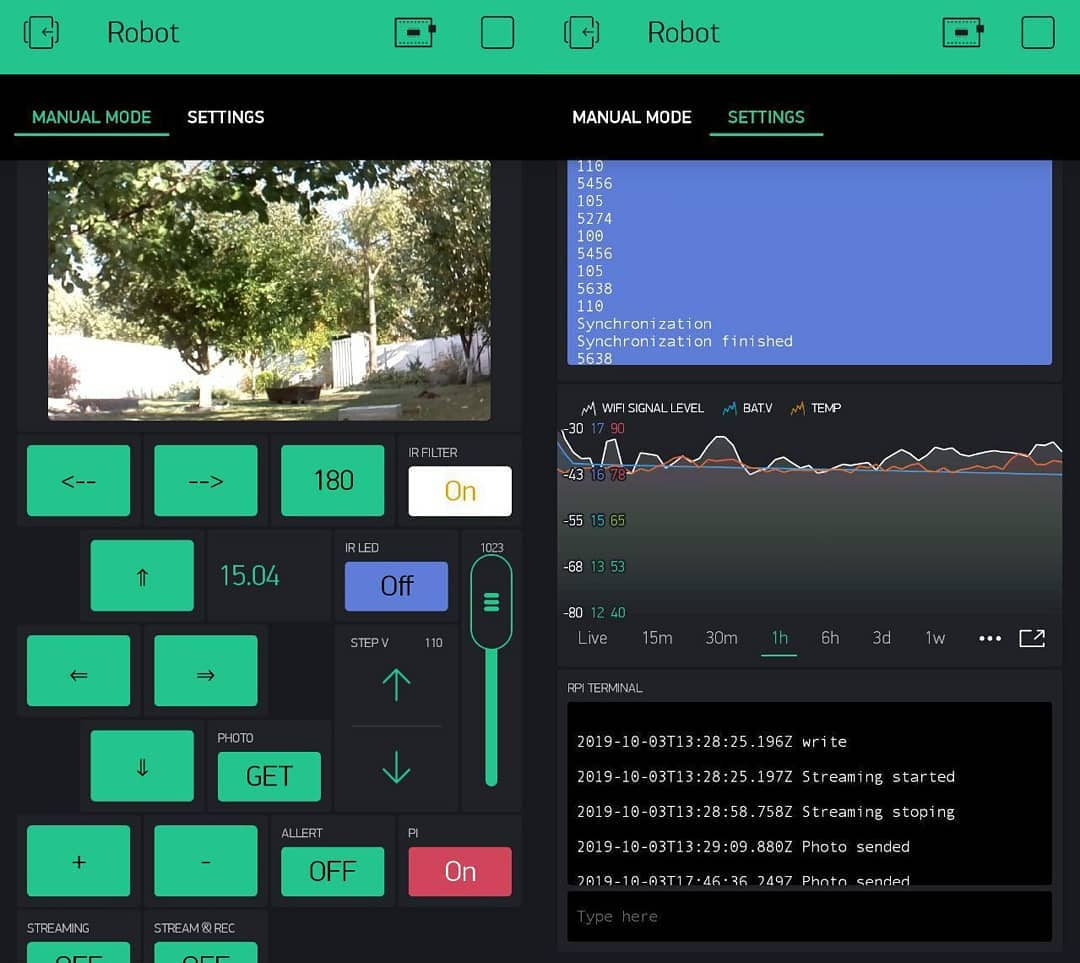 这就是UI在手机上的控制方式
这就是UI在手机上的控制方式接下来是什么,为什么我要写所有这些
通常,参观展览的目的是寻找与odnodumtsami的新朋友,准备开始做与机器人技术有关的事情。 我已经厌倦了仅以程序员的身份工作,编写桌面应用程序,这已经不像以前那样酷了,我认为这个方向正在逐渐弯曲。 我没有重新学习Web开发,而是决定从根本上改变方向,将生活与我真正喜欢的机器人技术和物联网联系起来。 就我自己而言,我认为在从事与该领域无关的工作时,我没有足够的时间。 我必须在我需要的东西和我喜欢和想要的东西之间进行选择,我省了一些钱,辞掉工作并开始研究所有这一切。
基于计算机视觉,深度图,对象识别等,我对机器人技术有一些想法,其中主要与农业有关。 我知道有很多工作要做,现在我才开始处理ROS。 我具有工程知识,能够使用CAD / CAE系统,并且原则上可以真正完成自己的所有工作,但了解在机械,开发,计算错误方面需要完成多少工作,并全面学习如何使用ROS,深度图,传感器,空间方向想到这一切将非常困难。 因此,我正在寻找几个人。 他们准备认真参与这家初创公司的工作,并成为联合创始人之一。 当然,我不能保证一切都会变得很酷,并且我们的初创公司将在半年内为我们带来很多钱,但是在这个小众市场充裕之前,您可以尝试在第一个原型级别上实现一些东西,并使用加速器,众筹平台和以某种方式宣传自己。
我也准备考虑这个方向的建议。 我已经准备好与某人的初创公司合作,也不一定是某家初创公司,而仅仅是某家公司的发展,但对我来说是一个有趣的方向。
因此,我想听听对此主题的任何评论。 毕竟,这也许会使某个人感兴趣。 我本人住在乌克兰第聂伯市。 因此,在相对较近的位置进行一个项目将是更正确的,尽管正在考虑数百公里而不是数千公里的所有选择。
如果对我给定的机器人的设备有任何疑问,我准备回答并讨论。 同样在facebook页面上,有一些关于机器人及其克服障碍的视频
如果有的话,您可以随时在
Facebook上找到我,或者在marchenko.andrii@gmail.com上写信给我