 在上一篇文章中,
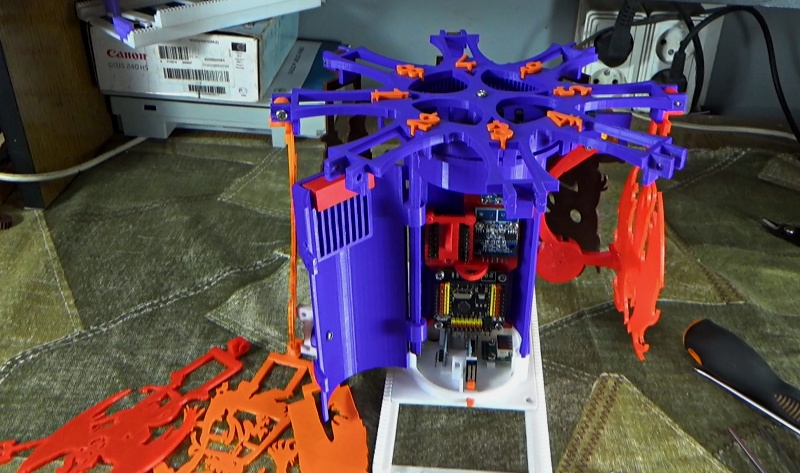
在上一篇文章中,我谈到了我的新开发-恶魔旋转木马机器人玩具。 我已经对该模型进行了实质性的改进,尽管该设备仍然无法运行(我仍然必须编写程序),但是我仍然有一些东西可以告诉您。 目标的设计已发生重大变化,射击范围的原理保持不变。
拍摄范围的所有部分在3D打印机上以50的速度和0.1毫米的速度打印了近50个小时。 打印可能会更快,但随后设备的质量会受到影响。
在新版玩具上,我花了约350克细丝。 但是,当然,考虑到所有的试验和错误,开发灯丝模型要花费更多的时间。
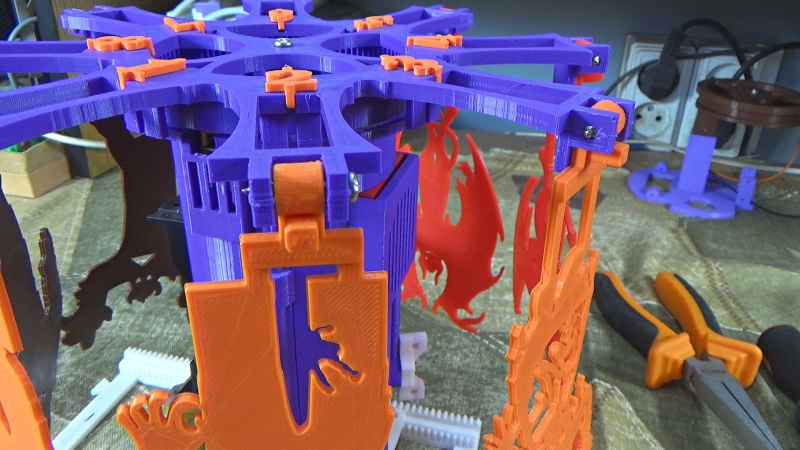
现在,新版本的目标支架看起来更优雅,而且比以前版本的设备耗费的灯丝更少。 同样由于这个原因,我能够将用于固定八个靶标的螺钉的数量从两个减少到一个。

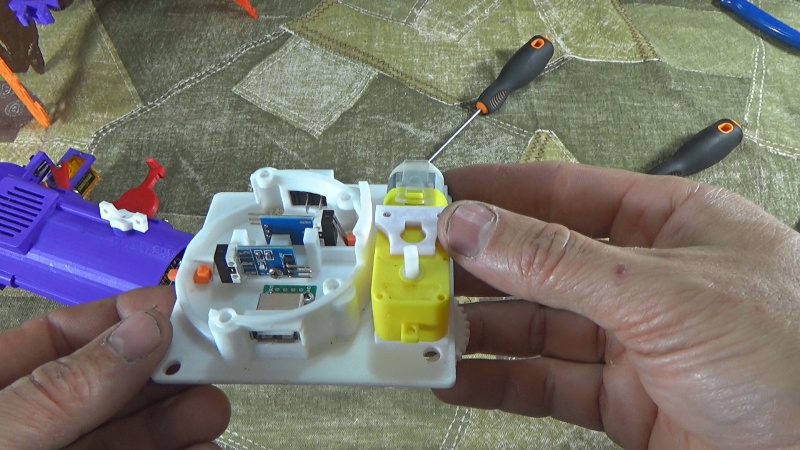
为了精确地定位目标,采用了带内齿轮啮合的圆柱齿轮。 因此,我避免了第一种选择的缺点,即目标支架直接安装在电机轴上。

两个光耦合器将目标设置在提升设备下方的正确位置。 使用光耦合器是一种便宜的选择,因此在该模型中我没有使用磁性位置传感器,价格约为7美元。 我还制作了带有磁性位置传感器的试用版,但事实证明,这只会增加结构的成本,并且不会对设备的操作进行任何重大改进。
为了使光耦合器在正确的位置工作,靶架背面有两个扇区。 具有一个位置的一个扇区可让您确定目标的初始位置。 在第二部分上,有八个位置确定举升设备下方是否有目标。
提升装置的机制与震动传感器的位置几乎保持不变,这里的设计没有进行特殊的更改。

由于移动电源上没有任何物体,因此移动电源板位于圆柱支架的末端,圆柱支架充当整个目标结构的固定器。 该设计的缺点是您需要取消焊接银行板上的USB连接器和开关的焊接,否则银行将无法进入其位置。


尽管可以进一步改进,但我并没有限制使用锂电池并用外壳覆盖它:为此,在外壳中有特殊的方孔。 螺丝穿过这些孔,以将移动电源固定到外壳上。 这些开口可以是用于隐藏锂电池的壳体的附接元件。
外壳上还有两个孔。 其中之一使您可以将USB充电连接到移动电源,而第二个则用于直观地监视LED的状态。
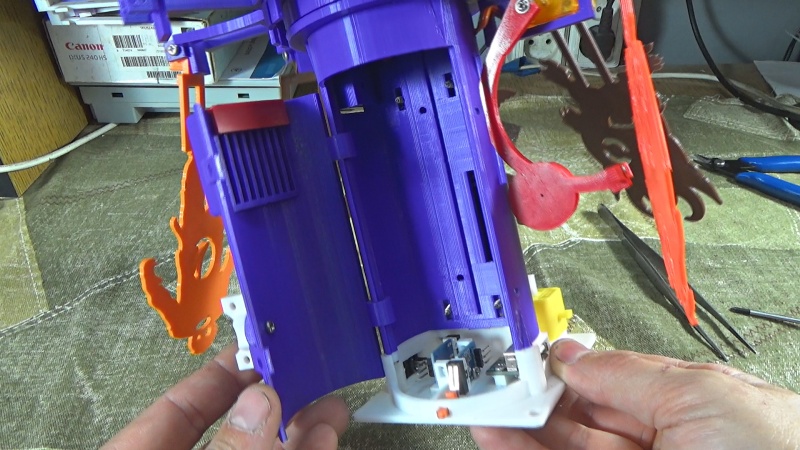
圆柱形支架是空心的,因此所有使用的电子设备都可以放置在内部。 提供了一个专用门。
所使用的模块(包括微控制器)的板通过M3短螺钉固定在挡板上。 自然地,假面板由塑料制成,并且还通过两个螺钉将其固定在车身上。
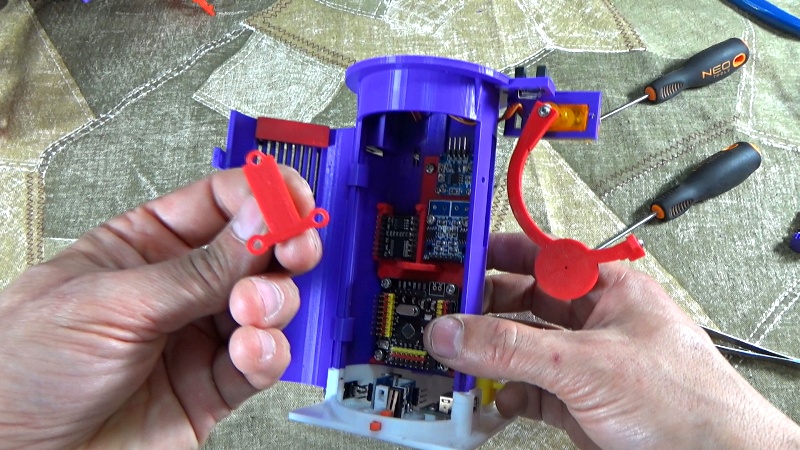
声音模块是一个例外,它不是为螺钉安装而设计的。 因此,声音模块固定在特殊的位置。 顺便说一句,需要使用扬声器,并且它非常适合门的设计。

我改进了移动平台。 现在,用于限制目标在轨道上移动的限位开关隐藏在外壳内。 从位于轨道上的限位挡块到限位开关的转换通过推动器进行。 这些推动器是两个塑料条,位于站点外壳的空心壁ni中。
推杆的设计特别强调,不允许推杆掉落到适当位置。
将来,我计划合并尚未通过USB连接器开发的其他设备。 在我开始指定这些设备是哪种类型之前,我只能说这些将是非常有趣的项目。