
1913年8月,彼得·内斯特罗夫(Peter Nesterov)进行了航空业中最激动人心,危险和复杂的动作之一-死循环。 当时特别考虑当时的技术,现在它才是真正的特技飞行。 来自航空领域的许多现代专业人士和业余爱好者都愿意与Nesterov进行交流。 不幸的是,这是不可能的,但是其他特技飞行王牌经常与我们同住并经常打扰我们。 通常,我们要么不注意它们,要么我们带着拖鞋或报纸在公寓里转来转去,因为对我们来说,它们是害虫,任何感染的携带者,只是令人讨厌的传单。 但是对于科学家而言,这些生物是飞行和着陆秘密的守护者。 今天,我们将与您会面,以惊人的方式研究普通苍蝇倒置在任何表面上的能力。 苍蝇使用哪种着陆机制,它由什么过程组成,并且在机器人技术中人为地实现它有多困难? 我们从研究小组的报告中了解到这一点。 走吧
学习基础
当然,您不能将所有的优势归功于苍蝇,因为许多其他昆虫在飞行和着陆领域也有其独特的能力。 但是,果蝇实际上积累了与其解剖结构直接相关的此类技能的最大数量。
 Calliphora vomitoria种蝇的外观。
Calliphora vomitoria种蝇的外观。在这项研究中,
Calliphora vomitoria (苍蝇)种的苍蝇发挥了主要作用。 这种物种几乎可以在地球的任何角落找到:从南美到东亚。 这些苍蝇的尺寸令人印象深刻,其长度为10-14毫米,大约是普通
家蝇 (
Musca domestica )的两倍。 在外观上,
Calliphora vomitoria可以通过蓝色腹部与亲戚区分开来,因此它也被称为“
bluebottle fly ”,暗示与蓝色瓶子的颜色相似。
除了家蝇的外部差异外,
Calliphora vomitoria还具有行为蝇。 蓝蝇更喜欢成群结队地飞而不是单飞,这使它们能够迅速找到食物(通常这是闻到强烈花香的花蜜)。 当一群人找到食物时,它会分泌一种特殊的信息素,将发现的信息传达给其他人。
人们在钓鱼时经常使用蓝蝇的幼虫作为诱饵,但是对于昆虫来说,这并不是最独特的,实际上,也不是最值得的应用。 不仅渔民喜欢青蝇,法医也很喜欢。 正如我们所知,苍蝇并不娇气,因为动物和人的尸体不会吓e它们,而是会吸引它们。 对于法医专家来说,这是估算死亡时间的附加标准,因为蓝蝇的幼虫生长速率与环境温度之间有着非常明显的关系。 知道了温度,就可以从幼虫确定产卵的时间。
但是今天,我们不会谈论法医,而会谈论航空。 反向拟合研究,即 正如科学家所说,降落在天花板上是较早进行的,但没有如此详细。 但是,发现了一些有趣的细微差别。 在观察家蝇倒地着陆时,科学家注意到它们在
同侧爪与表面接触之前进行“半圆”旋转运动。
同侧* -位于同一侧(放大,一个人的左臂相对于左腿同侧)。
在此运动之后,在腿部的帮助下发生了身体的横向振动,这导致了其余腿部与表面的接触。 当然,在实际着陆之前的这些和其他操作是由于传感器引起的,即 着陆前苍蝇收到的视觉,触觉和其他信号。
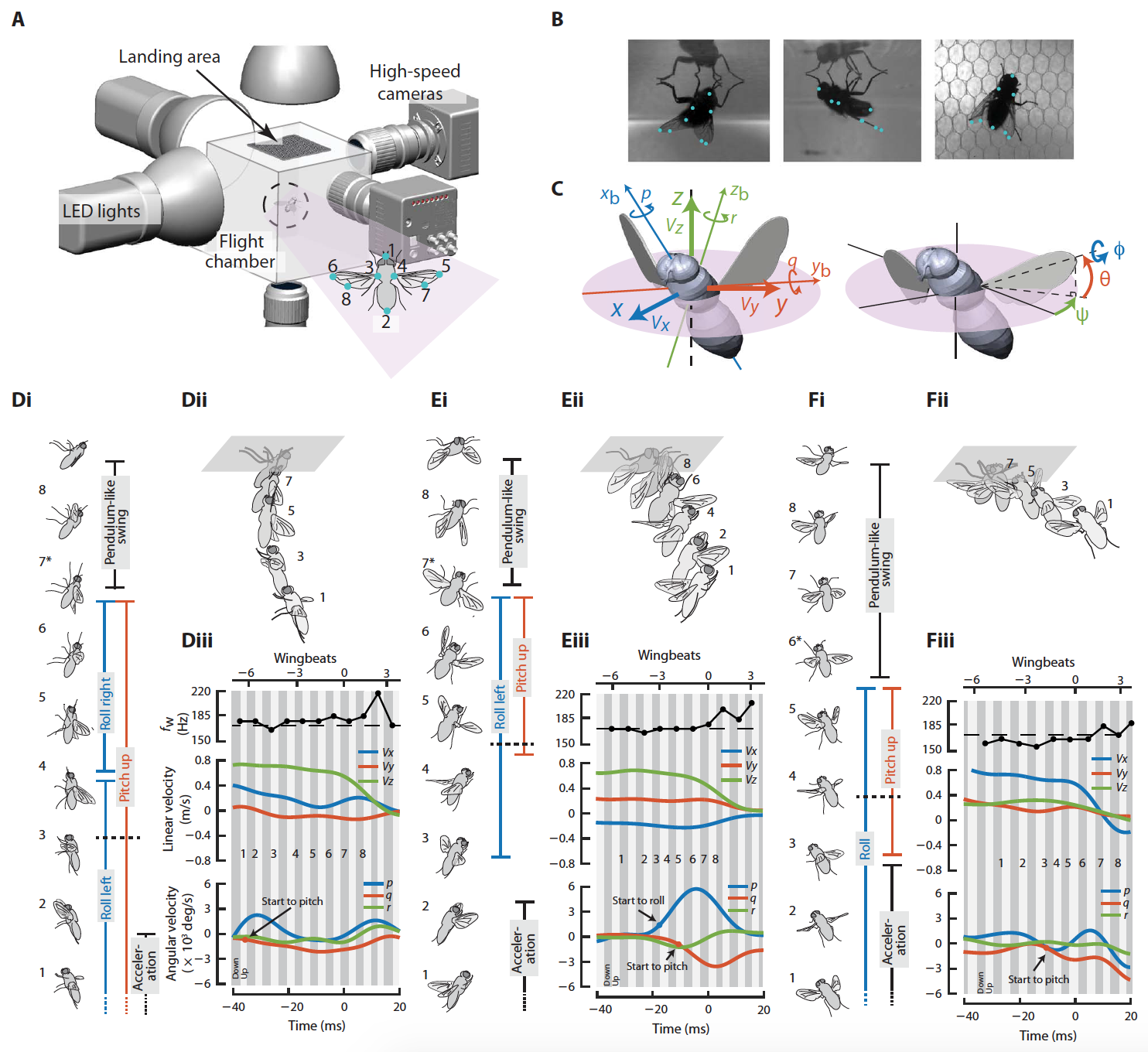
在今天的研究中,宾夕法尼亚大学的科学家使用高速视频(
1A )对蓝蝇在飞行室(在风洞中)倒置的表面着陆进行了一系列观察。
 图片编号1
图片编号1苍蝇的身体和翅膀的运动学是通过将解剖标记(
1B和
1C )数字化而获得的。
观察结果
首先,科学家决定隔离并分析一次成功着陆的行为方面。
他们注意到,果蝇在种植前通过持续减速和身体的轻微旋转而落在垂直表面上。 但是着陆期间的苍蝇立即表现出连续的四个行为方面:垂直加速,整个身体的旋转动作,腿部的伸展和整个身体的摇摆,并且前爪稳定地固定在表面上。 根据18次观察,整个成功着陆过程的持续时间约为4-8次机翼撞击,而平均机翼撞击频率为172.7±7.7 Hz。
在成功着陆期间,科学家还观察到旋转轴的运动学变化,旋转操纵的值以及由于爪引起的身体摇摆程度。
收集了所有观察结果后,科学家们确定了着陆过程中的主要策略,这些策略分类如下:
俯仰*占优势,
侧倾*占优势,侧向/纵向摇摆联合和占优。
间距* -主体相对于水平横轴的角运动。
Roll * -物体绕其纵轴的旋转。
视频#1:以主要俯仰着陆(对应于图像1D)。视频2:以盛行的着陆着陆(对应于图像1E)。图像
1D -
1F显示了降落期间蓝蝇行为的典型模式。 在前两个示例中,苍蝇主要使用相对于俯仰轴(
1D和1号视频)或横滚(
1E和2号视频)进行快速旋转的操纵,这使它们的身体在着陆之前几乎颠倒了(腹部向上)。
爪的对准几乎在旋转操纵开始后立即发生(
1Di和
1Ei上的水平黑色虚线)。 爪子接触表面后,身体开始摆动。
奇怪的是,旋转操纵的平均角速度达到了约4000°/ s,其最大值可能超过6000°/ s,这大大高于果蝇甚至蜂鸟的平均角速度。
视频#3:着陆时身体会产生纵向振动(对应于图像1F)。在第三个版本中,苍蝇几乎完全依靠其脚掌摆动身体(
1F和3号录像),而旋转动作则微不足道。
视频4:着陆时侧身摇摆。因此,与前两个选项相比,该着陆策略可能使用了更多的机械和结构过程(例如,由于
钉子*引起的
粘附*或由于爪的粘弹性导致的
阻尼* ),这有利于将身体的线性动量传递给旋转动量。
附着力* -不同来源的表面的附着力(例如,草地上的露珠)。
Pulvilla * -腿尖的软垫,每个都位于其爪下。 钉螺的主要任务是将昆虫保持在光滑或倾斜的垂直表面上。
阻尼* -人工抑制振动。
研究的下一步是研究成功着陆与未成功着陆之间的运动学差异。
视频5:结合了俯仰变桨机构。不成功的着陆包括那些以与地面碰撞而结束的着陆(当然,这是供科学家用来分析的数据,然后是果蝇的脑震荡,当然是比喻性的)。
 图片编号2
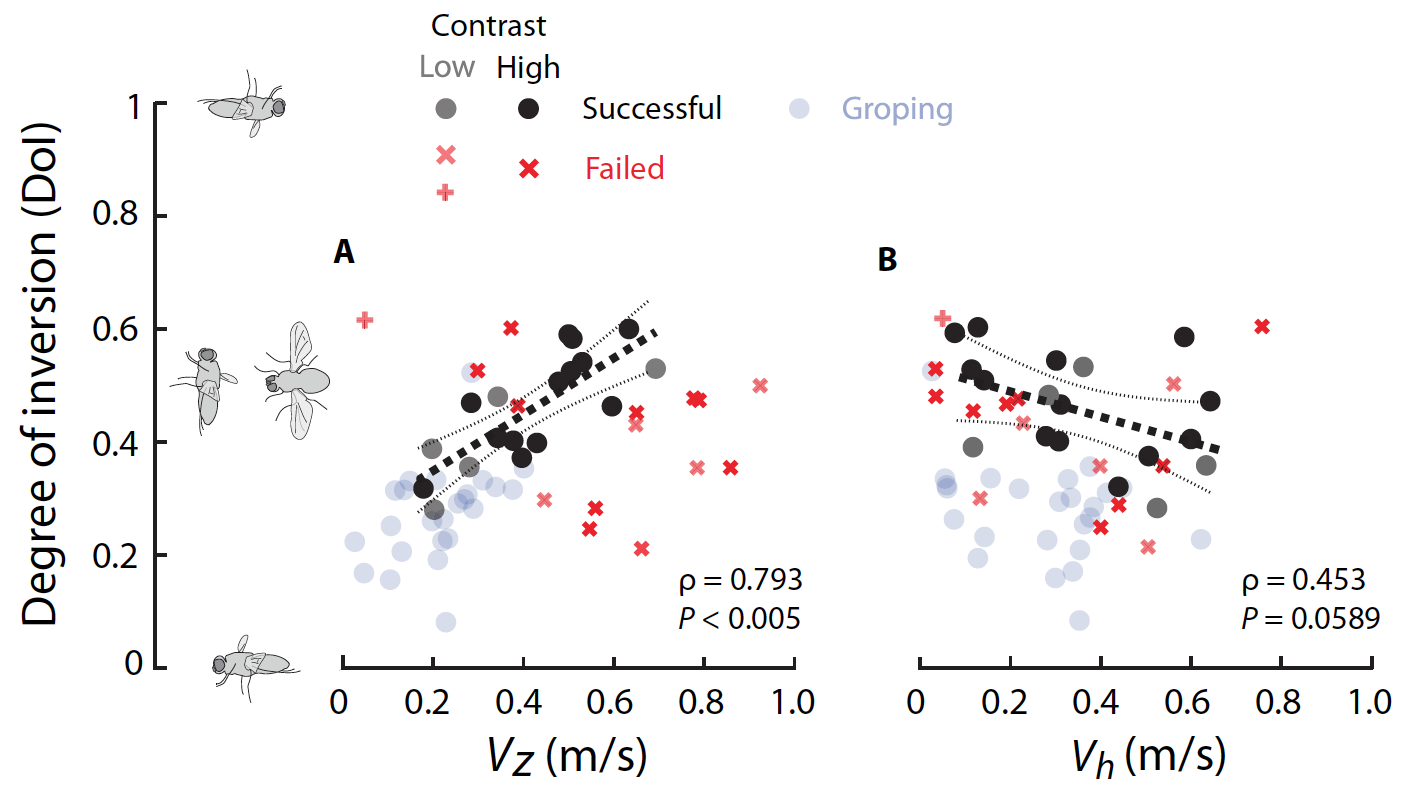
图片编号2为了量化果蝇的定向度,计算了一个倒置度(DoI from
倒置度 ),该度数衡量了果蝇的身体在着陆之前与完全倒置的定向对齐的程度。 DoI从0开始变化,这意味着没有身体倒置,即 腹部降至1,这意味着整个身体内翻,即 肚子起来。 在成功着陆时,DoI以垂直速度(
2A )增加,但以纵向速度(
2B )减少。
该观察结果表明,当苍蝇的上升速度较高或水平速度较低时,它们需要翻滚更多。 在大多数不成功的降落中(总共有15个),与成功降落的苍蝇的位置相比,苍蝇在降落的那一刻之前并没有颠倒过来。
失败的原因可能是降落之前身体不及时或旋转不足。 因此,这些苍蝇无法正确降落在天花板上,但坠落到天花板上。
视频#7:由于旋转动作过早,着陆失败。此外,由于车身旋转太早(视频第7号),还发生了不成功的着陆,因为较早的反转导致到达顶棚所需的垂直速度不足(在图
2A和
2B上标有“ +”号)。
视频第8幅:由于身体微弱的内翻和不适当地的双腿对准,导致着陆失败。尽管正确的倒置和移动速度,但失败的另一个原因是爪子的后期对齐,这导致了不正确的位置,因此与表面的接触不够牢固(视频第8号)。
视频#6:接触点降落在天花板上的示例。尽管存在所有刺破和缺点,但某些苍蝇仍可以通过接触降落而恢复并成功降落。 在这种情况下,苍蝇以较低的垂直速度在天花板下飞行,然后用前爪感觉到地面,然后紧贴着地(视频第6号)。
视频#9:由于身体微弱的内翻和轻微的身体旋转而导致着陆失败。总结从观测中获得的数据,科学家得出的结论是,果蝇着陆的运动学方面包含的神经过程比以前认为的要多得多。 最大的特点仍然是旋转机动。 剩下的只是要了解是什么引起了它,或者是什么信号导致了果蝇将其用于着陆这一事实。
当然,首先想到的是苍蝇以线性速度接近天花板时收到的视觉信号,该线性速度由三个分量(
1C )组成:垂直(
V z ),纵向(
V x )和横向(
V y )。
 图片编号3
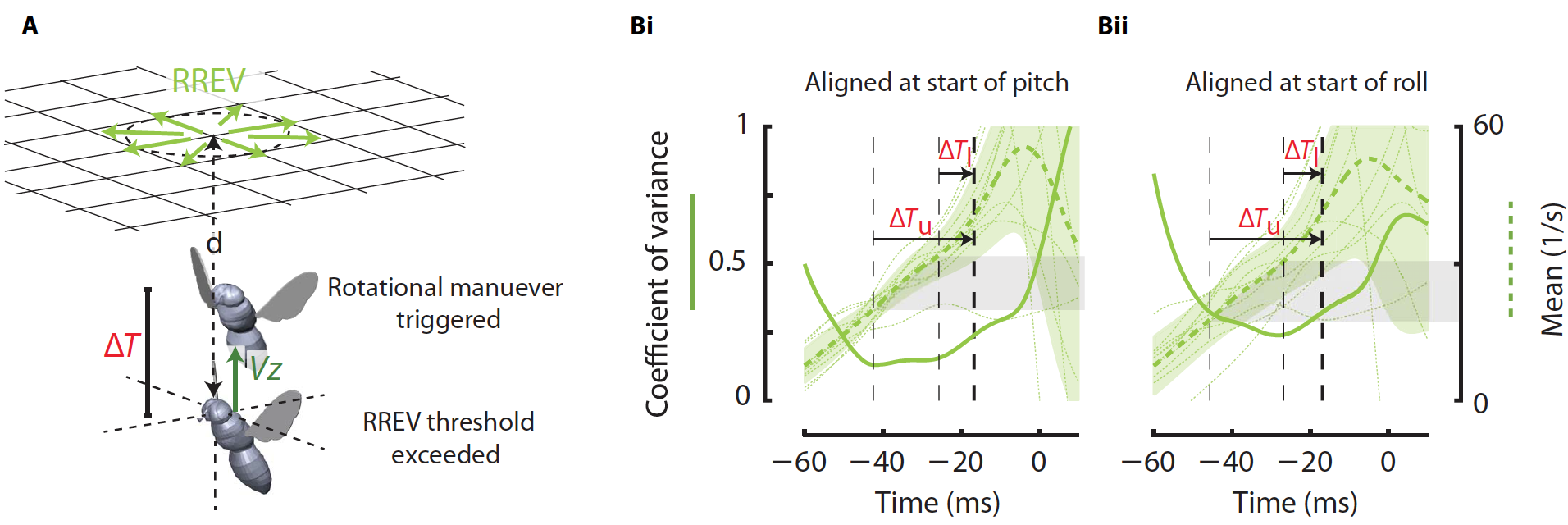
图片编号3由于其前辈的工作,研究人员准确地知道了评估飞行运动所需的三种主要视觉提示。
首先,由于不动的刺激(
3A )引起的相对视网膜扩张率(
RREV )。 可以将该指标计算为目标在向上移动过程中(
V z )在苍蝇的视网膜上的增长率与其实际大小的比率。 RREV也对应于碰撞时间(
t )的倒数。 RREV被认为是一种重要的感知信号,它可控制着陆或在障碍物周围行走时的进近速度。
 图片编号4
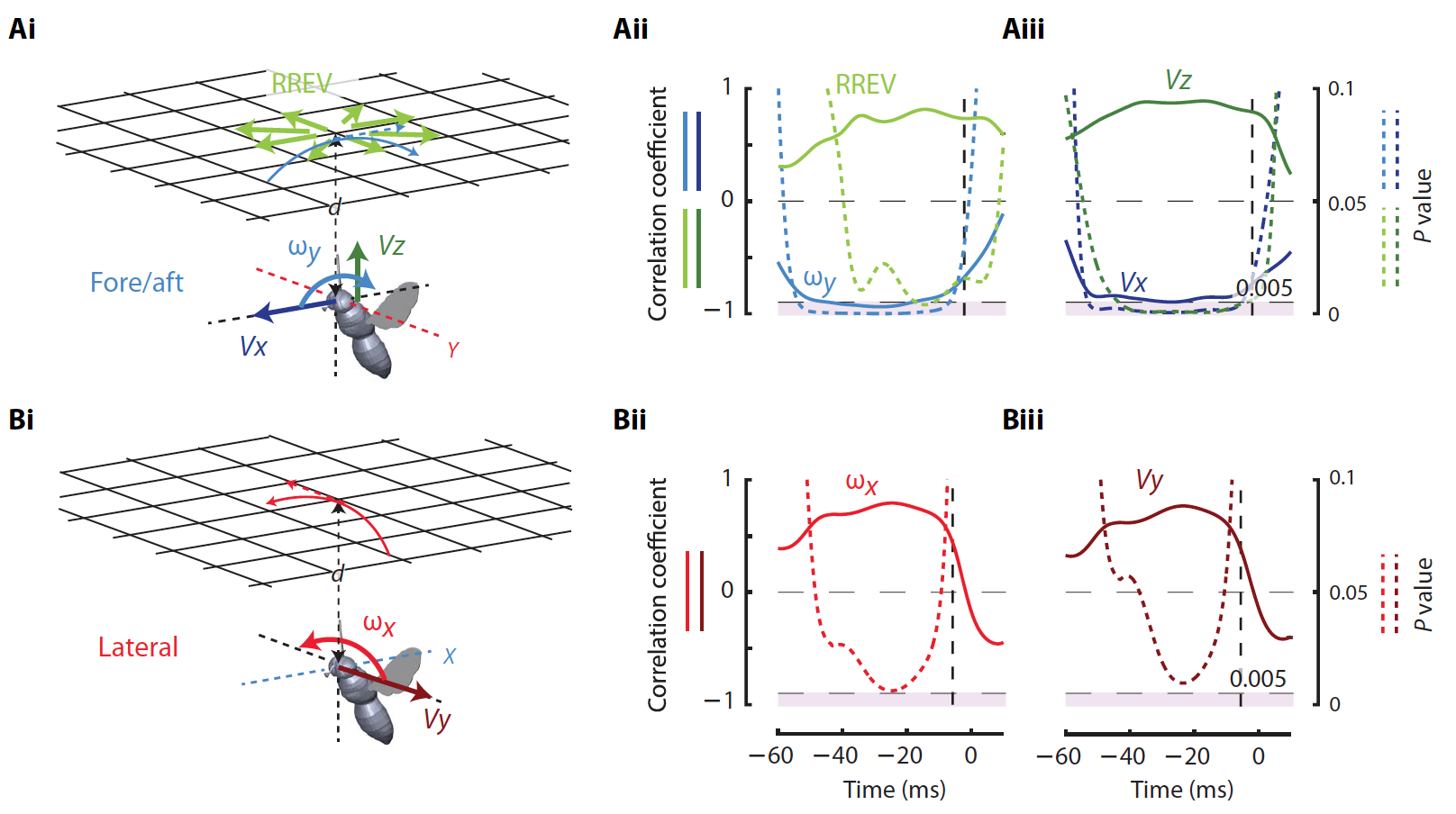
图片编号4其次,在蝇视网膜上天花板的纵向方向(
4Ai )的相对角速度(
ωy )。 这些视觉提示是身体向前/向后(
V x )移动的结果,即 在水平方向上。 先前已经发现,正是这些信号调节着陆平面的着陆。
第三,由于横向运动(
V y )而获得的蝇状视网膜(
4Bi )上的天花板(
ωx )的相对横向角速度。
研究人员建议,当挑衅(信号,导致实际动作)视觉信号达到阈值时,旋转操纵会在固定的时间延迟后开始。 这种假设使我们能够评估上述信号与着陆过程中苍蝇所执行的移动动作之间的关系。
第一步是计算每个视觉信号的变异系数(CV)的时间曲线。 以观察为基础,在此期间果蝇首次尝试成功降落在天花板上。
如果在一些延迟后开始旋转操作,则当视觉信号达到阈值时,该视觉信号的CV应该最小。 此外,它应低于其他非挑逗性视觉信号,即 挑衅性的视觉信号应具有最小的色散。 观察和计算表明,在三个测试信号中,RREV在转弯和侧倾时的CV值最低(15%),而在转弯时的CV值最低(25%),而其他两个视觉信号的CV则明显更高(
3B )。
这意味着RREV是主要的视觉信号,可在倒地着陆时触发旋转机动的开始。
开始旋转操纵之前,RREV的CV值在7 ms(∆T
l )和27 ms(∆T
u )之间最小。 因此,在感知时刻和操纵开始之间的视觉延迟DT在这个小范围内。 还发现,在碰撞之前的临界时间为31-53毫秒,在该临界时间以下,开始进行旋转操纵(避免碰撞并成功着陆)。 为了进行比较,果蝇降落在垂直表面上时,该数字为76毫秒。 换句话说,当降落在天花板上时,苍蝇出错的时间大大减少了。
根据观察结果,旋转操作在侧倾速度和俯仰方面变化很大。 这种可变性可以表明旋转操纵不仅由时间分量调节,而且还由其他感官信号调节。
苍蝇利用感觉信号通过直接和反馈通道提供旋转操纵。 直接通信通道发出自发的控制命令,这些命令会导致机翼运动发生明显的瞬时变化。 这些变化直接影响对操纵的主要反应的幅度。
反馈通道可提供补偿性响应,从而引起机翼运动的微小变化。 这种变化会影响阻尼(抑制振动)和操纵的稳定性。
通过揭示旋转操纵期间最大侧倾和旋转速度与操纵前后苍蝇感知到的感觉信号之间的相关性,可以估算一个或另一个感觉信号对操纵的影响程度。
提出的传感器信号包括前面讨论的三个视觉信号(RREV,ωx和
ωy )以及线速度的三个分量(
V x ,
V y和
V z )。
线性回归分析表明,在开始操纵之前的很长一段时间内,最大俯仰速度与RREV(
4Aii )和垂直速度
V z (
4Aiii )正相关,但与纵向旋转
ωy (
4Aii )和纵向线性速度
V x负相关(
4Aiii )。
进而,在操纵开始之前和之后的延长时间段中,峰值侧倾速度与横向旋转
ωx (
4Bii )和横向线速度
V y (
4Biii )正相关。
分析还表明,苍蝇可以改变旋转操纵的强度,以便更有效地利用着陆时的身体振动,即将线性脉冲传递到有角度的脉冲。
如观察结果所示,线性脉冲高时,音调速度会降低,如峰值音调电平与传感器信号之间的负相关性所示。 因此,代替俯仰,果蝇将它们的身体翻转过来,增加了它们的爪子在身体上的纵向振动,并将直接的线性脉冲传递给俯仰角动量。
当横向线性脉冲较高时,也观察到侧倾速度的增加,如峰值侧倾速度和感觉信号之间的正相关性所示。 在果蝇需要更大距离以将其同侧爪子举到足够高并到达天花板以进一步摇动身体的情况下,会发生这种反相关。
不要忘了飞行是航班最重要的属性,即 关于翅膀。
研究人员分析了在天花板降落期间果蝇机翼的运动学,因为正是机翼产生了成功操纵所必需的各种空气动力。观察苍蝇的翅膀,发现在操纵时发生了许多变化。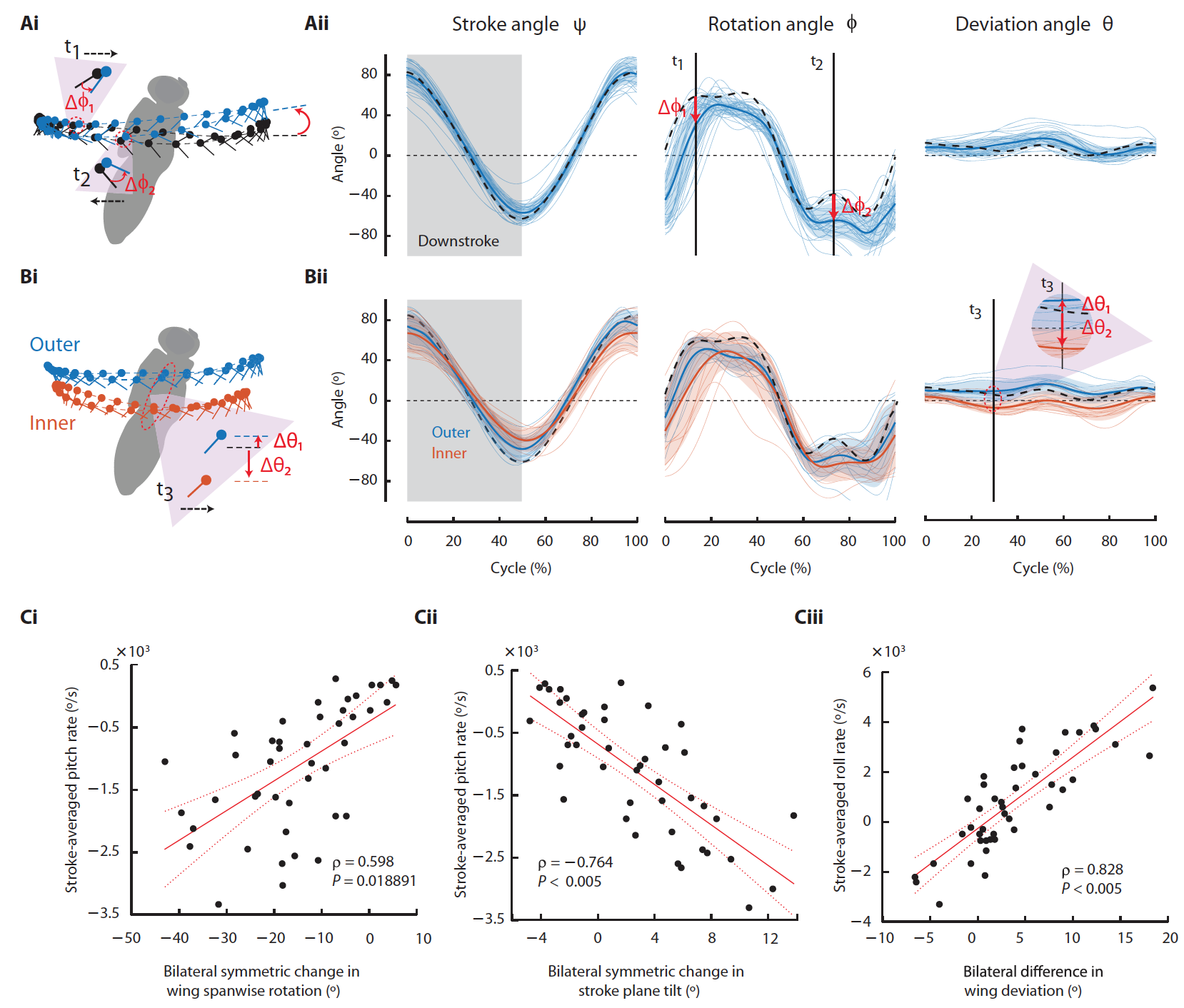 图片编号5发现的第一件事是机翼纵向旋转的双边对称变化(5A和5Ci)和机翼平面角的双边对称变化(5A和5Cii),两者都与俯仰频率密切相关。机翼倾斜度(5B和Ciii)也有变化,这与侧倾速度密切相关。此外,襟翼的幅度和中翼的旋转也发生了变化,这有助于侧倾。
图片编号5发现的第一件事是机翼纵向旋转的双边对称变化(5A和5Ci)和机翼平面角的双边对称变化(5A和5Cii),两者都与俯仰频率密切相关。机翼倾斜度(5B和Ciii)也有变化,这与侧倾速度密切相关。此外,襟翼的幅度和中翼的旋转也发生了变化,这有助于侧倾。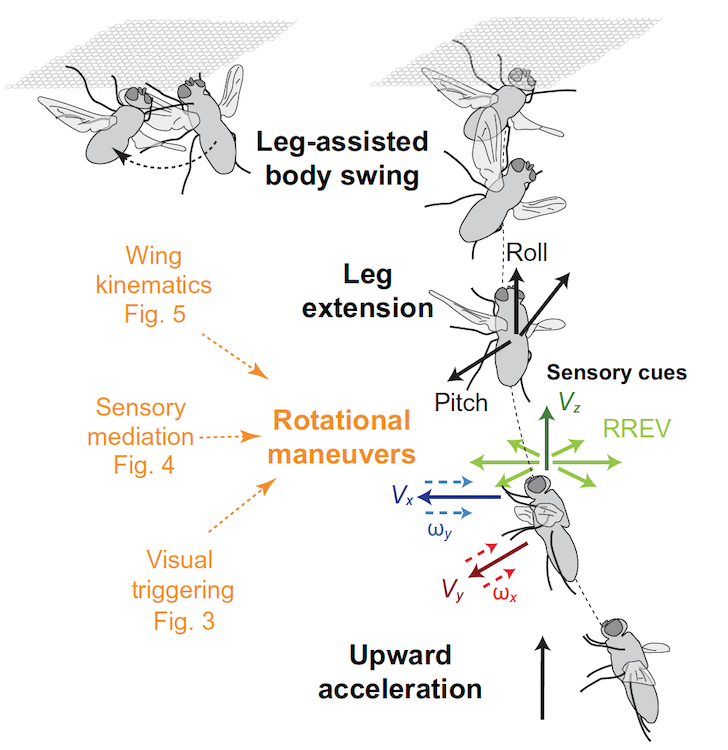 第6张图片为了更详尽地了解这项研究的细微差别,我建议您研究一下科学家的报告以及其中的其他材料。
第6张图片为了更详尽地了解这项研究的细微差别,我建议您研究一下科学家的报告以及其中的其他材料。结语
总结所有的观察结果和计算结果,研究人员得出的结论是,倒置在天花板上的现象是由于行为模块的顺序协调一致(如上图所示)。降落在天花板上可能包括神经过程,这些过程不仅计算有关碰撞前时间的RREV编码信息,而且还计算其他应该编码人体多轴线性运动的感觉信号。目前,科学家仍无法准确回答在操纵过程中哪些感觉信号导致某些运动的问题。但是,明确开展的工作为将来的研究提供了基础。对昆虫和鸟类的观察一直是人类创造飞机的灵感。研究苍蝇也不例外。科学家认为,他们的观察表明,要成功实施能够在倒立表面着陆的机器人或载人汽车,就需要紧密结合计算和机械过程。例如,它可以是用于图像的快速识别方案和用于设备位置的控制系统,以及通过使身体在其腿上振动而实现的飞行稳定系统的组合。曾经一个人只能梦想飞翔,如今已成为现实。但是,在这种环境中,我们只是宾客,对我们而言,这是许多活生物体的本机,在我们成为云端的正式邻居之前,我们还有很多要了解,发现和探索的地方。谢谢大家的关注,保持好奇心,祝大家工作愉快! :)
感谢您与我们在一起。你喜欢我们的文章吗?想看更多有趣的资料吗?通过下订单或将其推荐给您的朋友来支持我们,在
我们为您发明的独特模拟入门级服务器上为Habr用户提供
30%的折扣: 关于VPS(KVM)E5-2650 v4(6核)的全部真相10GB DDR4 240GB SSD 1Gbps从$ 20还是如何划分服务器? (RAID1和RAID10提供选件,最多24个内核和最大40GB DDR4)。戴尔R730xd便宜2倍?仅在荷兰,我们有2台Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100电视!戴尔R420-2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB-$ 99起!阅读有关如何构建基础架构大厦的信息。使用Dell R730xd E5-2650 v4服务器花费9000欧元(一分钱)的c类?