大家好!
在这篇文章中,我想继续进行物理和机械测试的机器设计。
让我提醒您(
第一部分 ),该机器(原型机)是悬臂式的,可以在上下两个区域进行拉伸和压缩测试。
除了关于运动学和装配的第一篇文章之外,在设计中还添加了在3D打印机上打印的带有波浪形海绵的压花手柄,车窗玻璃升降器的变速箱也用作驱动器。 因为我们在谈论动力单元,所以这种齿轮马达相当弱,特别是在低转速时。 也许在项目的以下修改中,我将安装带有步进电机的齿轮电机。
现在,我将讨论软件。 我必须马上说,我的程序员很一般,虽然我想的不是所有的东西,但程序仍然很原始,尽管它可以工作。
该程序是在Delphi编程环境中编写的。 由于有一些不方便的时刻,我已经在此阶段更改了设计,但是现在我不会这样做,我想先确定主要算法。
电子产品基于arduino控制器和两个附加模块。 上载的固件非常简单,即从两个传感器收集数据,通过串行端口接收和发送数据以及控制齿轮马达。
要使用串行端口,我安装了ComPort库。 来自arduino的数据以字符串形式传输:S力传感器/位移传感器E(S123456 / 123E)。
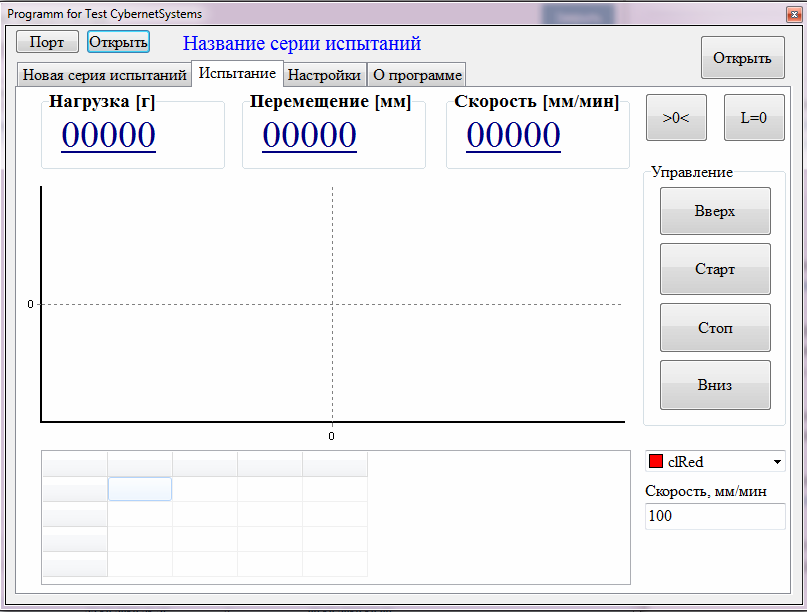
该程序是单窗口的,尺寸为800x600像素(以免打扰缩放)。 它包含几个书签:一系列新的测试,测试,设置。
我将从最后一个书签-设置开始。
通过端口接收的所有数据都显示在终端中,我从中拉出字符串,检查字符串是否符合要求,并通过变量将值分开。

变量乘以系数以匹配实际质量和位移值。
我们在与力,位移或速度对应的字段中的同一选项卡中获得所有这些系数。
速度计算系数按照逆原理工作,将速度的设定(实际)值转换为arduino可以理解的0到255之间的值。
填写所有字段并计算系数后,即可保存数据。 它们被保存在Exel文件中,因为方便查看和修复(如有必要)。
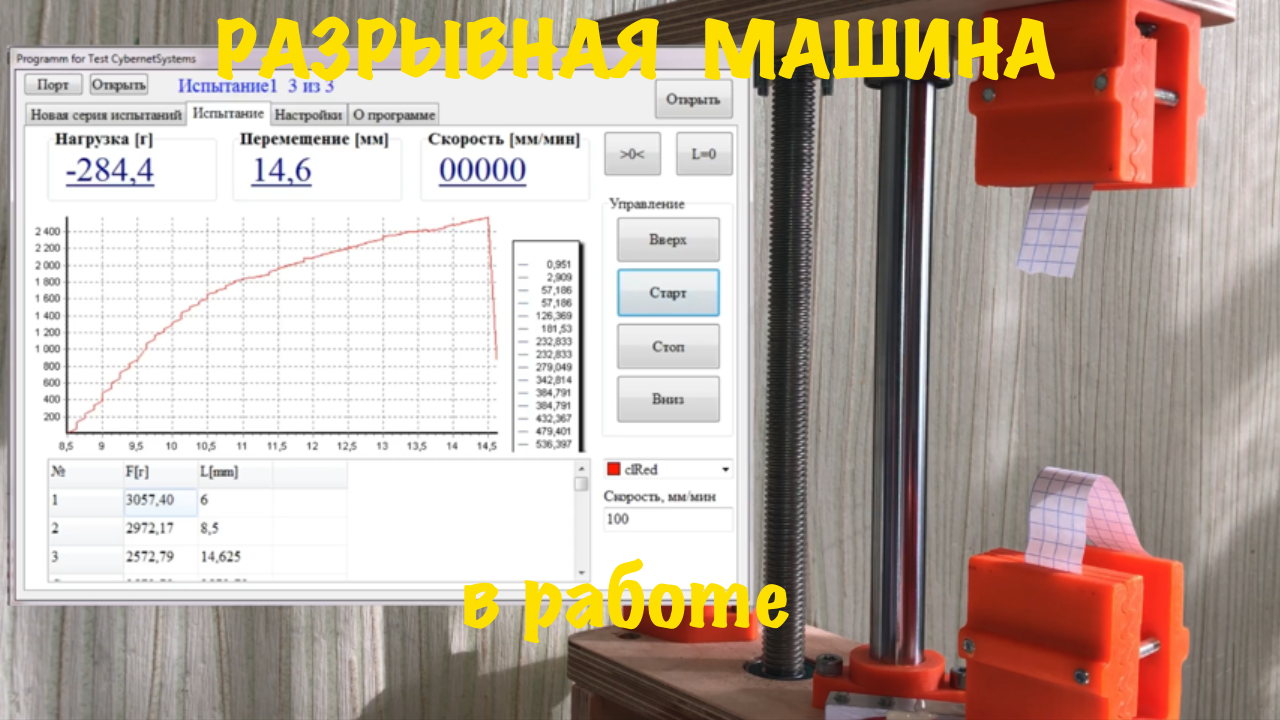
让我们转到页面-测试。
可以说是使用机器时的主页。 上部显示来自传感器的数据。 机器控制按钮位于右侧:将可动磁轭“向上”,“向下”和“停止”移动。 “开始”按钮以在创建测试时指定的速度和方向开始测试,但下面会详细介绍。
中心部分是测试计划的输出区域,下面是一系列测试结果的摘要表。 测试(破坏样品),力和位移的最大值后,表格会自动填充。
要开始一系列新的测试,我们将转到第一个选项卡。
它必须指出测试系列的名称,测试次数以及测试期间光束移动的速度。 通常,根据GOST进行的测试为12毫米/分钟,但是在我的情况下,它会稍高一些,因为齿轮马达在低转速时没有足够的动力。

接下来,您必须选择测试类型:压缩,拉伸或循环。 以及测试完成后自动停止机器的准则。
可以有多个这样的标准-停止达到给定的载荷或位移,以及在破坏试样时载荷下降。
后者是优选的,因为可以在非线性增加的负载下调节挡块。
停止时负载下降的标准是由于给定时间内的负载下降百分比。
输入测试所需的所有参数后,单击“开始”按钮,然后转到“测试”页面。
我们将样品尽可能同轴地安装在夹具中,以使测试正确通过。
在该程序中,我们将重设载荷和位移值,以便不考虑样品的重量和夹持器夹紧后的初始张力。
按下“开始”按钮可设置可动导线的运动,并在屏幕上开始绘制图形,以显示负载如何向上爬行。 达到其物理极限后,样品将被破坏,并且机器将停止运行。 在图表下方的汇总表中,将显示最大载荷和变形(位移)的值。 然后,您可以继续进行该系列的下一个测试。
在最后一次测试结束时,负荷和位移的平均值显示在摘要表中。
每个测试系列将测试参数和数组数据存储在Excel文件中。 这对于其他程序中的后续分析非常方便。
将来,我计划改进该程序,并用带齿轮箱的步进电机替换驱动器,然后再看到它...